
数字图像边缘的快速提取算法研究*
2017-12-22 08:10段振云单紫薇赵文辉
组合机床与自动化加工技术 2017年12期
段振云,单紫薇,赵文辉,杨 旭
(1.沈阳工业大学 机械工程学院,沈阳 110870;2.中国科学院沈阳自动化研究所,沈阳 110016)
数字图像边缘的快速提取算法研究*
段振云1,单紫薇1,赵文辉1,杨 旭2
(1.沈阳工业大学 机械工程学院,沈阳 110870;2.中国科学院沈阳自动化研究所,沈阳 110016)
在机器视觉测量系统中,图像边缘提取是进行后续坐标计算的必要前提,为了提高图像边缘提取的速度与精度,提出一种新的数字图像边缘提取算法。用高斯滤波对图像进行平滑处理,根据八邻域的位置关系,经过灰度值的比较确定图像边缘。通过与常用的边缘检测算子Sobel算子和Canny算子的边缘提取效果的实验比较,该算法运算量小,速度快,且能直接提取出图像连续的单像素边缘,优于传统的图像边缘提取算法,实用性强。
机器视觉;边缘提取; 高斯滤波;八邻域
0 引言
边缘是图像基本特征之一,边缘检测是图像处理、图像分析、模式识别、计算机视觉以及人类视觉的基本步骤[1-2],因为在图像边缘中包含着一些用于识别的信息,人们主要通过图像认识世界,并且通过边缘了解图像中物体的位置与轮廓,从而对图像进行分析,所以寻找一种有效的图像边缘提取算法有着十分重要的研究意义。经典的边缘检测是基于检测算子的方法,通过考察待测点在某个邻域内的灰度变化,然后利用一阶或二阶方向导数变化规律,根据一定的判断标准检测出边缘。常见的边缘检测算子有Roberts算子、Sobel算子、Prewitt算子、Laplace算子、LOG算子、Canny算子等,这些算子是依据图像的每个像素邻域内灰度值的变化,采用数学方法中的一阶或二阶方向导数的变化来检测边缘[3-4]。近年来随着数学理论及人工智能的发展,涌现出许多新的边缘检测方法,如基于小波变换[5]和数学形态学的边缘检测法、基于神经网络和自适应阈值选取的边缘检测法[6]等。然而运用这些算子进行边缘提取,噪声对其影响较大,而且算法效率不高。
针对以上问题,提出一种新的背光源灰度图像边缘提取算法。该方法在提取边缘像素时不需要计算导数,运算量小,速度快,将其应用于齿轮图像边缘检测中,能准确地提取出连续的单像素边缘。
1 硬件系统
本系统所用的主要硬件如图1所示。工业相机采用德国piA2400-17gc全帧型面阵CCD黑白相机。分辨率为2448像素×2050像素,像素尺寸为3.45μm×3.45μm。镜头选用无透视畸变的远心镜头,照明光源采取平行背光源2PFT系列,利用光源数字控制器根据照明环境进行参数调节,使图像和背景最佳分离。本测量系统以齿轮作为测量对象,齿轮的安装采用双顶尖结构。通过竖直导轨滑块结构来实现镜头的固定和上下移动,来调整镜头、光源与被测齿轮之间的距离,避免了人工移动相机镜头带来的误差。

图1 机器视觉测量系统结构图
拍摄的齿轮初始图像如图2所示。

图2 齿轮图像
2 图像边缘提取
2.1 图像平滑
一幅图像在获取和传输过程中,会受到各种各样的噪声干扰。图像噪声来自多方面,有系统外部的干扰,如电磁波或经电源串进系统内部而引起的外部噪声,也有来自系统内部的干扰,如摄像机的热噪声等,这些噪声干扰使图像退化,质量下降。表现为图像模糊,特征淹没,对图像分析不利。图像平滑是一种实用的数字图像处理技术,主要目的是为了减少噪声,一个较好的平滑处理方法应该既能消除图像噪声,又不使图像边缘轮廓和线条变模糊[7]。
均值滤波和中值滤波是典型的图像平滑去噪方法[8]。均值滤波通过以窗口内的平均值代替中心像素实现线性滤波,但因忽略相邻窗口的数据相关性而造成图像模糊。由于绝大部分的噪声信号可被认为服从高斯分布,而高斯滤波对于抑制服从高斯分布的噪声非常有效,因此本文采用高斯滤波去除图像噪声。
选用一维高斯函数G(x)构造滤波器,分别按行和列对原始图像f(x,y)进行卷积操作,得到平滑图像I(x,y)。

(1)
I(x,y)=[G(x)G(y)]·f(x,y)
(2)
式中,σ是高斯函数的标准差,用来控制平滑程度。
2.2 边缘提取
如图3所示,在数字图像中,除了整幅图像的边界,每个目标像素都存在其八邻域像素[9-10],传统的边缘提取算法中,需要计算一阶或二阶导数,根据目标像素的八邻域像素灰度值的变化趋势来确定图像边缘,本文提出了新的边缘提取算法,不需要计算导数,只需比较八邻域中某些邻域灰度值的大小关系即可确定图像的单像素边缘。而且,传统的八邻域边缘追踪算法主要用于二值图像中,本文提出的算法将其应用于灰度图像,用合理的阈值进行限定,并通过标记判断后的点来防止发生重复判断,避免判断进入死循环。
为了保证图像的单像素边缘,根据八邻域的位置关系,在进行灰度值比较时,不需要比较目标像素的所有八邻域像素的灰度值,即可确定下一边缘点的位置。

图3 图像边缘点的搜索情况
如图3所示,当前两个边缘点1和2已经确定时,搜索接下来的边缘点时都会按照以下原则,图中标三角号的像素点无需重复判断,在搜索第三个边缘点时,只可能存在于其他五个未被标记的邻域内,所以只需将当前目标像素与这五个邻域的灰度值进行比较即可。同理在搜索第4个边缘点时,只需比较其八邻域中的三个邻域即可确定下一边缘点的位置。
通过比较目标像素与预设灰度值的大小来判断这些点是否为下一边缘点,判断条件如下:
(3)
式中,P(i±1,j±1)表示邻域中待判断像素灰度值;Pmax,Pmin分别为图像边缘过渡带中的最大最小灰度值,通过直方图统计得出;由Pmax,Pmin得出Pm作为判断的阈值;P为一个变化的中间变量,将P的初始值设为Pm。
在以一个邻域为周期的判断中,将最后留下的点保存,作为下一边缘点。
具体做法如下,以图3为例,判断过程可以描述如下:
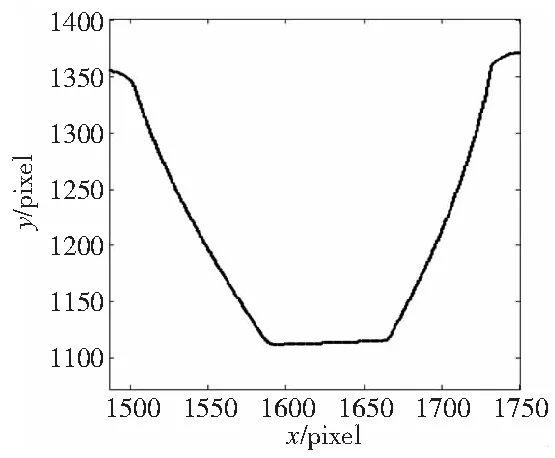
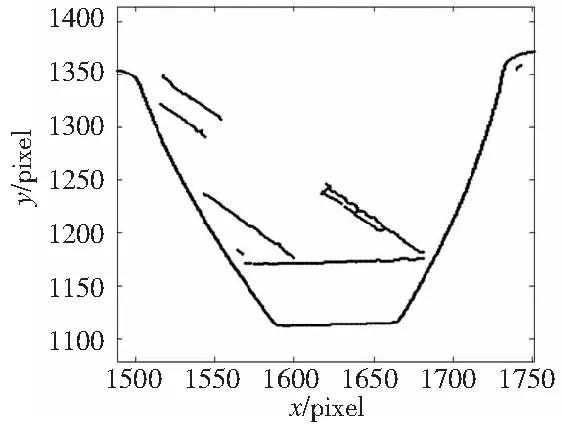
(1)首先,通过直方图统计得出最小和最大灰度值的平均值作为阈值,此时将P赋值P=Pm。从坐标原点开始,沿y轴方向搜索,根据判断条件Pmin (2)在以起始点1为中心的八邻域内进行像素灰度值的第一次判断,满足上述三个判断条件时,储存当前点灰度值,记下坐标位置,进行标记,在接下来的判断过程中,不再对被标记的点进行判断。同时,进行P的重新赋值,P=|P(i±1,j±1)-Pm|,作为下一邻域判断的判断值,进行邻域内的第二次判断。若满足判断条件,则释放上一次储存的灰度值,储存当前判断点的灰度值与坐标位置,P点再次重新赋值。若不满足判断条件,则继续保留上一满足判断条件的判断点的灰度值与坐标位置,P值不变。同理完成其他几个邻域的判断,到此,第一次判断结束,并以最后保留下来的作为起点继续追踪。 (3)在图3中假设下一边缘点为2,根据现有的两个边缘点1、2和连续单像素边缘的特点,可知下一边缘点一定在图中未被标记“△”的其他五个邻域的位置,而被标记的点则不再判断。于是,在以2为中心的八邻域内进行判断时,只需进行其他五个点的判断,大大减小了运算量。将五个邻域的灰度值判断完成后,将最后保留下来的点保存,作为图像的下一边缘点。经过筛选之后使判断的灰度带变窄,防止发生重复判断和判断进入死循环的状态。 (4)多次循环重复上述判断,通过比较保留像素点,求取图像边缘。当判断到达整幅图像的边界时,则跳出循环,判断结束,否则继续判断,直到满足图像边界条件。 总结后流程图如图4所示。 图4 图像边缘提取流程图 被测齿轮的模数m=2,齿数z=60,系统像素当量值e=19.497μm/像素,为了验证本文算法,从图像的边缘提取算法中选取具有代表性的Sobel算法和Canny算法与本文算法进行对比实验,利用MATLAB进行实验分析,在对比实验中,对齿轮的背光源灰度图像进行了多次试验。图5是一幅齿轮图像,为了使实验结果更加清晰,截取提取到的齿轮图像边缘的一个齿进行放大分析,图6a、图6b、图6c分别是本文算法和Sobel算法、Canny算法提取到的图像边缘,由三种边缘提取算法的结果发现,本文算法与Sobel算法提取到的边缘均为单像素宽,Canny算法提取到的边缘中含非边缘像素。 图5 齿轮图像 (a)本文算法提取到的齿轮图像边缘 (b)Sobel算子提取到的齿轮图像边缘 (c)Canny算子提取到的齿轮图像边缘图6 三种算法提取到的齿轮图像边缘 表1是三种算法的性能比较,从三种边界提取算法的结果发现,Canny算法提取到的像素个数最多,Sobel算法次之,但根据其作用原理可知,Sobel算子具有平滑作用,能去除部分噪声,但也平滑了真正的边缘,定位精度不高,而本文算法在边缘定位准确的前提下提取到单象素宽的边缘(批注FLM8)。而在运行时间方面,与Canny算子相比,本文算法未提取到非边缘像素,大大减少了运算量,节省了运算时间,与Sobel算法相比,本文算法也相对简单,因此在运行时间方面,由于本文算法不需要计算导数,因此在运行时间方面(删除),本文算法也优于Sobel算法与Canny算法,处理的图像数据越大,本文算法的时间优势就越明显。综上结果表明本文算法优于Sobel算法和Canny算法。 表1 三种边缘提取算法的性能比较 本文提出了一种新的图像边缘提取算法,该算法不需要计算导数,只需比较目标像素与周围邻域像素灰度值的大小关系,能直接从图像中提取出单像素边缘。与Sobel算法和Canny算子相比,本文算法运算量小,速度快,定位精度高,没有提取额外的像素,也不存在边缘不连续的情况,更适合后续的图像处理。 [1] 崔明,顾启民,黄霞.基于机器视觉的轴承滚动体缺陷检测算法研究[J].组合机床与自动化加工技术,2015(11):74-78. [2] 贾永红.数字图像处理[M].武汉:武汉大学出版社,2003. [3] Carsten Steger, Markus Ulrich, Christian Wiedemann. Machine vision algorithms and application [M]. Beijing: Tsinghua University Press, 2008. [4] 王小俊,刘旭敏,关永,等.基于改进Canny算子的图像边缘检测算法[J].计算机工程,2012,39(14):196-199. [5] 孙延奎.小波分析及其应用[M].北京:机械工业出版社,2005. [6] 赵萍,赵文珍,段振云,等.一种用于精密样板检测的边缘提取方法[J].机械设计与制造,2012(12):177-179. [7] J Seewig. Linear and robust Gaussian regression filters. 7thInternational Symposium on Measurement Technology and Intelligent Instruments[C]. Institute of Physics Publishing, 2005:254-257. [8] 平丽.图像平滑处理方法的比较研究[J].信息技术,2010(1):121-124. [9] 苏成顺,李贞培.基于多线程的分段图像轮廓跟踪算法口[J].计算机技术与发展,2009,19(10):99-101. [10] 周丰乐,徐向民,肖跃,等.一种新的二值图像目标轮廓跟踪算法[J].微计算机信息,2007,26(2-3): 259-261. StudyontheImageEdgeExtractingAlgorithmforMachineVisionMeasuringSystem DUAN Zhen-yun1,SHAN Zi-wei1,ZHAO Wen-hui1,YANG Xu2 (1. School of Mechanical Engineering, Shenyang University of Technology, Shenyang 110870,China;2.Shenyang institute of automation, Chinese Academy of Sciences,Shenyang 110016, China) Image edge extraction is the necessary premise in the machine vision measuring system.In order to improve the speed and precision of image edge extraction, this paper proposes a new digital image edge extraction algorithm. By Gaussian filter to smooth the image, according to the position of 8 neighborhood relations, through the comparison of grey value image edge is determined. With the commonly used edge detection operator Sobel operator and Canny operator edge detection result comparison, the experimental results show that the operator does not need to calculate the derivative, small computational complexity, fast speed, it can directly extract image continuous single pixels edge, superior to the traditional image edge extraction algorithm, strong practicability. machine vision; boundary extraction; gaussian filter; 8 neighborhood TH122;TG506 A 1001-2265(2017)12-0012-03 10.13462/j.cnki.mmtamt.2017.12.003 2017-01-15; 2017-02-24 十二五国家科技支撑计划(2014BAF08B01) 段振云(1971—),男,河南新乡人,沈阳工业大学教授,博士生导师,博士,研究方向为复杂曲面加工技术、视觉检测,(E-mail)13604045543@139.com;通讯作者:单紫薇(1991—),女,辽宁建昌县人,沈阳工业大学硕士,研究方向为视觉检测,(E-mail)599195346@qq.com。 (编辑李秀敏)
3 实验结果分析



4 总结
猜你喜欢
数学物理学报(2022年5期)2022-10-09
农业工程学报(2022年7期)2022-07-09
北京航空航天大学学报(2022年6期)2022-07-02
高校应用数学学报A辑(2022年2期)2022-06-21
逻辑学研究(2021年3期)2021-09-29
天津医科大学学报(2021年1期)2021-01-26
校园英语·上旬(2020年1期)2020-05-09
中国信息技术教育(2020年2期)2020-02-02
计算机应用与软件(2018年12期)2018-12-13
卷宗(2017年16期)2017-08-30
