
喷涂机器人运动学与轨迹规划算法研究*
2017-12-22 08:10顾海巍
组合机床与自动化加工技术 2017年12期
李 芳,顾海巍
(1. 武汉职业技术学院 计算机技术与软件工程学院,武汉 430074;2. 哈尔滨工业大学 机器人技术与系统国家重点实验室,哈尔滨 150001)
喷涂机器人运动学与轨迹规划算法研究*
李 芳1,顾海巍2
(1. 武汉职业技术学院 计算机技术与软件工程学院,武汉 430074;2. 哈尔滨工业大学 机器人技术与系统国家重点实验室,哈尔滨 150001)
文章针对6自由度喷涂机器人的机构特点和作业要求进行了深入分析,进而对其运动控制算法进行了研究。首先,通过MDH法对机械臂构建了关节坐标系;其次,对喷涂机器人进行了运动学模型的建立与分析,从正逆两个方面对运动学特性进行了详细的分析和描述;再次,对喷涂机构采用迭代法进行了逆解算法的研究与论述并分析了喷涂机器人轨迹规划的特点,给出了规划器的形式;最后,通过MATLAB仿真软件对运动学算法的有效性进行了验证,同时验证了该算法在轨迹跟踪时的精确性。
喷涂机器人;轨迹规划;运动学模型
0 引言
随着先进制造业的发展,工业机器人已在众多领域成功应用。喷涂机器人广泛应用于汽车等产品的涂装生产线,但相较于世界四大机器人厂商,国产的喷涂机器人技术水平仍然较低。陈旧的机械构型是制约国内喷涂机器人性能的一个重要原因。喷涂机器人通常用于汽车车身的喷漆,涂装工作环境对于机构有如下要求:喷涂运动轨迹要有相互重叠的部分,有适当的间距,用以调节喷漆的厚度;喷涂汽车车身时,要求相应的喷涂机器人末端的运动能够对车身的运动保持稳定快速的跟踪;考虑到喷涂车间的洁净要求,所有的油漆管、溶剂管和测速光纤等重要管线需从喷涂机器人的本体内部穿过,连接到喷枪,以保证在手腕转动过程中,不能引起内部管线等打结或折断。
斜交机构与传统机构在运动学解算时差异较大。多数6轴机构由于满足Pieper准则,其逆运动学具有解析解,可通过初等函数运算来求解,例如:Puma机器人的后3轴轴线相交于一点,UR轻量化机器人的第2、第3与第4轴轴线相互平行。
斜交喷涂机构分布特征不满足Pieper准则,故其对应运动学逆解是非封闭的。逆运动学算法作为喷涂机器人的核心算法,是对其进行运动控制的基础,诸如轨迹规划和离线编程等重要功能均依赖于此。学术界对于喷涂机器人运动控制算法的研究已经取得了一定的成果。例如,Lee H Y采用方向余弦对建立了非正交喷涂机器人的运动学矩阵方程,分析了其正逆运动学特性[1];Qiao S G和Liao Q Z在求解逆运动学过程中采用了矩阵的SVD分解法,对求解高阶矩阵方程具有良好的效果[2];Raghavan M和Roth B通过系统降维方法,对运动学矩阵方程进行求解[3];Zhongcai Pei,Mingwei Zhao和Difei Liu提出了一种基于BP神经网络来解析喷涂机器人运动学分析的问题[4];Alessandro Gasparetto、Renato Vidoni、Daniele Pillan和Ennio Saccavini研究了相关喷涂机器人运动学、自动路径和轨迹规划[5];Yaqiu Liu,Jianhua Teng和Xiaopeng Zhang用于家具表面喷漆的机器人运动算法和最优轨迹规划[6]。上述方法存在如下问题:逆解算法的效率较低,系统开销较大;使用传统喷漆轨迹对于喷涂工艺的调节不够灵活、连续。
本文首先将工业机械手分为位置部分、姿态部分两个部分。然后利用MDH法构建运动学正解析,利用牛顿迭代法求解出了喷涂机器人手的逆向运动学模型,进而分析了喷涂机器人轨迹特点,对轨迹规划方法进行了研究,最后通过MATLAB对算法进行了仿真验证。
1 机构分析
在自动涂装应用中,按照与喷涂机器人集成的简易程度,喷涂系统可进行如下划分。简易集成喷涂系统:该系统仅喷枪置于机器人第6轴法兰末端,喷涂机器人总控仅通过IO信号控制喷枪的喷漆动作,涂料输送设备作为独立个体;复杂集成的喷涂系统:包含换色控制模块、喷漆配比调和模块集成于机器人末端小臂内,机器人可以实现对喷涂参数(扇形、雾化、涂料流量、涂料种类、涂料比例)的精确控制[7]。
喷涂机器人区别于传统6R机器人的垂直型机构设计,喷涂机器人的后3个关节间轴线并不相互垂直导致建立的位姿与关节等量关系的方程中更易出现更多关节正余弦值相乘的情况,进而导致解析解不易得到[8]。喷涂机器人的机械结构如图1所示。第2、3轴电机部署于在大臂的下方,两个电机对侧放置;大臂及前臂的运动分别由2、3轴电机带动锥齿轮长轴驱动,前3轴减速比较大,约为100~200;2、3轴各有一个弹簧平衡器;腕部关节为中空形式,3个回转轴的相邻两轴线间夹角为60°,后3轴的减速比较小约为10。前3个关节减速比较大为保证机器人本体的稳定性减小机械设计框量对机器人末端精度的负面影响;后3个关节减速比较小接近于直驱,主要是为确保通过后3关节调节姿态时的灵活性。

图1 喷涂机器人机构
2 运动学建模
2.1 运动学正解
如图2所示,为本文要研究的喷涂机器人本体。表1为机器人的MDH参数,其中αi-1表示连杆的长度,是zi-1与zi之间的公垂线,ai表示连杆的转角,是zi-1与zi之间的角度,di表示连杆的偏距,表示zi轴上两条相邻的公垂线之间的距离,θi表示关节角,使xi-1与xi相互平行绕z轴旋转的角度[9]。

图2 喷涂机器人连杆坐标系
通常把描述一个连杆和下一个连杆间相对关系的齐次变换叫做T矩阵[9]。6自由度机械臂的MDH参数如表1所示:

表1 机械臂的连杆MDH参数
T矩阵实际上是一个描述连杆坐标系之间相对旋转和平移的齐次变换。坐标系应用MDH的方法建立,其中坐标变换矩阵为:
其中:


2.2 拟牛顿迭代
通常情况下求解非线性方程组,方程数与未知数个数相等,对于非线性方程组。
fi(x0,x1,…,xn-1)=0;i=0,1,…,n-1
简记为:fi(X)=0;i=0,1,…,n-1
其中:X=(x0,x1,…,xn-1)T
原则上,金融开放不仅影响金融中介部门的发展,同时也影响一国的股票和债券市场发展。从数据的可获得性考虑,由于金融中介发展的指标涵盖更多的国家,本文选择衡量金融中介发展的指标作为研究对象。

X(k+1)=X(k)-F(X(k))-1f(X(k))
(1)
其中:
F(X(k))为雅克比矩阵,即:
(2)
2.3 逆运动学
对于喷涂机器人可以通过向量p与前4轴的关节值建立三个方程,尚缺少一个方程来构建雅克比矩阵。此处可以按照如下方法考虑此问题:
假设已求得前4轴关节值可行解,则有如下关系:
(3)
利用c5建立等量关系,可得:
而

据此可以建立包含四个方程的方程组:

求解雅克比矩阵J,且保证其始终可逆。
由此可得,牛顿迭代格式为:
(4)
求得前4轴后,可通过前4个变换矩阵求得后两个变换矩阵的乘积即

可求得:

3 轨迹规划
3.1 轨迹规划概述
轨迹跟踪控制是指使机器人末端以明确的位姿沿着规划的路径进行运动。在关节空间,位置插补是指起始点和目标位置之间通过一定的方法计算出运动过程中的离散位置点。喷涂机器人在涂装汽车表面的过程中,喷枪扫过的轨迹要部分相互重叠,并保持适当的间距,可以通过周期性曲线轨迹来完成喷涂路径的规划,为了获得更好的运动性能,保证运动过程中轨迹跟踪的连续性和平顺性,采用正弦曲线轨迹作为喷涂作业的轨迹路径,由于正弦曲线具备在定义域内连续高阶可导的属性,运动性能和运动参数调节效果变得较为理想[10]。涂装作业时根据机器人当前位置,选取一个空间向量作为喷枪的喷漆的总体运动方向,称为路径向量,根据工件表面法线和宏观方向向量可确定喷洒曲线的振幅方向;通过改变振幅的大小来调节喷洒高度,改变正弦曲线的周期(频率)可调节喷洒路径上重叠部分的宽度,进而调节喷漆的厚度和喷枪在路径向量上的行进速度。
3.2 轨迹生成
考虑空间轨迹在路径向量上的投影,t表示轨迹在路径向量上的投影位置,A表示正弦曲线的振幅,B表示正弦曲线的频率,喷涂轨迹线在路径向量上的高度可用如下公式来表示。

(5)
假设待涂装表面为空间平面,则喷枪方向始终与待涂装表面的法线平行,由待涂装表面及路径向量可确定正弦曲线所在的空间平面,故曲线的波动方向如下:
N=(mx,my,mz)×(ax,ay,az)=
(azmy-aymz,axmz-azmx,aymx-axmy)
涂装喷洒过程中保持末端姿态不变,空间轨迹为上述正弦曲线,据此可得到轨迹的三维空间坐标。
(6)
正弦频率为0.5Hz和1Hz时,轨迹曲线分别如图3、图4所示。

图3 喷涂轨迹曲线(频率=0.5Hz)

图4 喷涂轨迹曲线(频率=1Hz)
由图3、图4可见,通过调节正弦曲线的频率可实现对喷漆路径中重叠部分宽度的调节,正弦振幅可调节喷涂纵向高度的大小。
4 仿真验证
选取喷涂机器人关节空间位置θ1=73°,θ2=20°,θ3=29°,θ4=33°,θ5=15°,θ6=80°为规划起始点。通过规划器生成正弦轨迹,并通过先逆解再正解的方式,来验证运动学算法的有效性。可得到如图5所示的轨迹曲线,其中粗线为规划期生成的曲线,细线为通过运动学算法计算后跟踪的曲线。
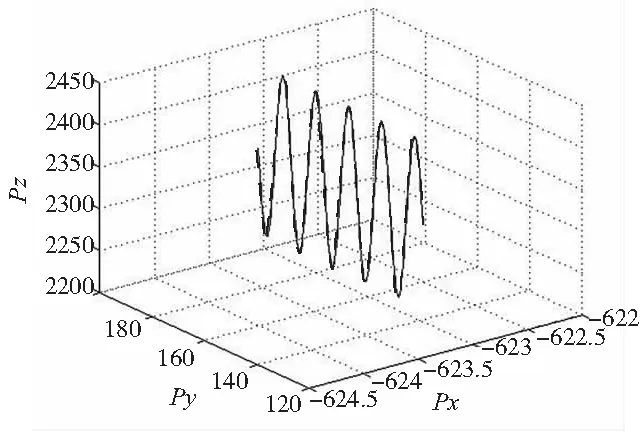
图5 喷涂轨迹跟踪效果
由图5可见,粗线与细线几乎完全重合,通过计算得到,两条曲线各个插值点空间距离所形成的序列的数学期望为0.0011,标准差为0.0007。曲线跟踪的准确性和稳定性可以达到工业应用的实际需求。但结算结果未能达到足够小的原因是逆解解耦运算过程中迭代收敛阈值略大及迭代过程中雅克比矩阵阶数较高,曲线重合代表的是总体跟踪效果理想,个别插值点处相对于其他位置偏离较大通常是不能避免的,对于喷涂机器人的工作特殊性而言,没有影响。轨迹生成中插值点的选取较为重要,关键的拐点处的插值点对于轨迹整体的连续性及平顺性影响较大,同时会影响到运动控制中各个关节运动学参数的连续性,减小对关节的冲击,使得作业流程更加柔顺。
5 总结
本文针对喷涂机器人的机构特点进行了详细分析,阐述了其工作环境对机构提出的苛刻要求。简要分析了目前学术界对于喷涂机器人的研究进度。通过MDH对喷涂机构进行了建模,采用数值迭代法进行了逆运动学求解,并对喷涂机器人工作轨迹进行了分析,采用正弦曲线来实现喷涂轨迹路径,并提出了可通过更改正弦曲线的频率与振幅的方式来调节喷涂轨迹的重叠区域和喷洒宽度。最后,通过MATLAB对运动学算法对轨迹跟踪的效果进行了仿真验证,确认了其有效性和精确性。现阶段研究尚未涉及机器人动力学部分,在今后的研究中会加入通过动力学前馈来改善机器人运动性能的部分。
[1] Lee H Y, Liang C G. A New Vector Theory for the Analysis of Spatial Mechanisms[J]. Mechanism and Machine Theory, 1988, 23(3):209-217.
[2] Qiao S G, Liao Q Z. Inverse Kinematic Analysis of the General 6R Serial Manipulators Based on Double Quaternions[J]. Mechanism and Machine Theory, 2010, 45(2): 193-200.
[3] Raghavan M, Roth B. Inverse Kinematic Analysis of the 6R Manipulator and Related Linkages[J]. ASME Journal of Mechanical Design, 1993, 115(3): 502-508.
[4] Zhongcai Pei,Mingwei Zhao,Difei Liu. Spraying robot kinematics analysis based on BP neural network[C]. Information and Automation,2015: 2744-2748.
[5] Alessandro Gasparetto,Renato Vidoni,Daniele Pillan. Automatic Path and Trajectory Planning for Robotic Spray Painting[C]. Proceedings of ROBOTIK 2012,7th German Conference on,2012: 1-6.
[6] Yaqiu Liu,Jianhua Teng,Xiaopeng Zhang. Optimal trajectory planning of spray manipulator for furniture surface painting[C]. 2008 Chinese Control and Decision Conference,2008: 918-924.
[7] 王战中,张大卫,安艳松,等.非球型手腕6R串联型喷涂机器人逆运动学分析[J]. 天津大学学报, 2007,40(6):665-670.
[8] 翟静涛,赵勇国,庄丙远,等. 椭圆曲线回转类零件NURBS插补算法研究[J].组合机床与自动化加工技术, 2016(2): 112-114.
[9] 刘振宇,赵彬,朱海波,等. 六自由度机械臂分拣系统仿真平台研究[J]. 机械设计与制造,2013(2): 210-213.
[10] 刘振宇, 郝明, 赵彬, 等. 工业机器人在线仿真系统研究[J]. 微型机与应用, 2014(6):117-120.
StudyontheAlgorithmofKinematicsandTrajectoryPlanningforSprayRobot
LI Fang1,GU Hai-wei2
(1. School of Computer Science and Software Engineering, Wuhan Polytechnic, Wuhan 430074,China;2. State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin 150001, China)
In this paper, the mechanism and operating requirements of 6 DOF painting robots are analyzed, and the motion control algorithm is studied. Firstly, the joint coordinate system is constructed by MDH method. Secondly, the kinematics model of the painting robot is established and analyzed. The kinematics characteristics are analyzed and described from two aspects. Finally, the validity of the kinematics algorithm is verified by MATLAB simulation software. At the same time, the effectiveness of the algorithm is verified by the MATLAB simulation software. At the same time, the effectiveness of the algorithm is verified. At the same time, And the accuracy of the algorithm in trajectory tracking is verified.
spraying robot; trajectory planning; kinematic model
TH166;TG659
A
1001-2265(2017)12-0025-04
10.13462/j.cnki.mmtamt.2017.12.006
2017-01-16;
2017-02-14
国家自然科学基金项目(61203346)
李芳(1975—),女,武汉人,武汉职业技术学院讲师,硕士,研究方向为计算机应用研究,(E-mail)lifang0980@163.com。
(编辑李秀敏)
猜你喜欢
资源节约与环保(2022年8期)2022-09-20
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09
东西南北(2017年3期)2017-03-01
汽车维护与修理(2016年10期)2016-07-10
海军航空大学学报(2015年1期)2015-11-11
