水下网络化综合试验测试系统技术研究
2018-01-22 03:39段文海崔国平付传宝
声学与电子工程 2017年4期
段文海 崔国平 付传宝
(昆明船舶设备研究试验中心,昆明,650051)
随着水下航行器及其技术的发展,新型水下航行器的实航试验具有强综合、多参量、高精密等共同特点,从而对水下综合试验测试能力提出了更高的要求。而现有系统一般采用分布式独立测试模式,即不同测试任务由相应系统独立完成,因此,急需研究形成多组态试验测试能力,提高并发展信息化集成条件下的水下航行器航迹跟踪、辐射噪声测量、实航参数遥测、实时水声遥控以及对水下航行器打捞潜器的水声语音通讯与导航控制。结合上述应用需求,本文提出并研制了一种基于光纤网络的水下综合试验测试系统,实现了多科目实航试验及多参量集中测试,进一步提高了水下综合试验与测试能力。
1 系统方案
1.1 系统组成
水下网络化综合试验测试系统主要由湿端和干端两大部分组成(组成框图如图1所示、结构框图如图 2所示)。湿端系统主要包括光电复合缆、水下基站等单元;座底的水下基站(部分测量浮筒可根据需要进行升降)由光电复合缆串行连接,布放于试验水域一定深度,形成一个孔径几公里的长基线“口”字阵,是水声跟踪、噪声测量、水声遥测、水声遥控、水声通讯、水文测量的水下共用基阵。干端系统主要包括网络控制、同步跟踪、噪声测量、水声遥测、水声遥控、水声通讯、水文测量等单元,置于岸上机房内,以网络控制设备为中心进行并行连接,各项试验测试单元既可独立运行,也可联合工作。此外,水声跟踪发射机、水声遥测发射机、水声遥控接收机、水声通讯收发机则分别装载在水下航行器上,并与相应系统配合工作。
1.2 系统工作原理
水下网络化综合试验测试系统主要功能包括:水下多目标航迹跟踪、航行辐射噪声测量、航行参数水声遥测、中低速目标水声遥控、对潜器水声语音通讯、水文参数测量等,其工作原理为:
● 试验前,通过可升降的水下基站水文参数传感单元获取不同深度的水温、声速等水文信息,建立主要试验水域在不同时段、不同工况条件下的典型水文信息库;
● 试验中,①通过水下基站水声信号接收单元实现水下目标的航行航迹跟踪、航行辐射噪声测量、航行参数信息实时水声遥测、航行噪声监视监听;②通过水下基站水声信号发射单元实现对水下航行器的水声遥控、对水下机动目标(潜器等)的水声语音通讯;
● 试验后,系统综合集成各种试验测试信息,实现试验过程反演、试验结果输出及试验效果评估。

图1 水下网络化综合试验测试系统组成图
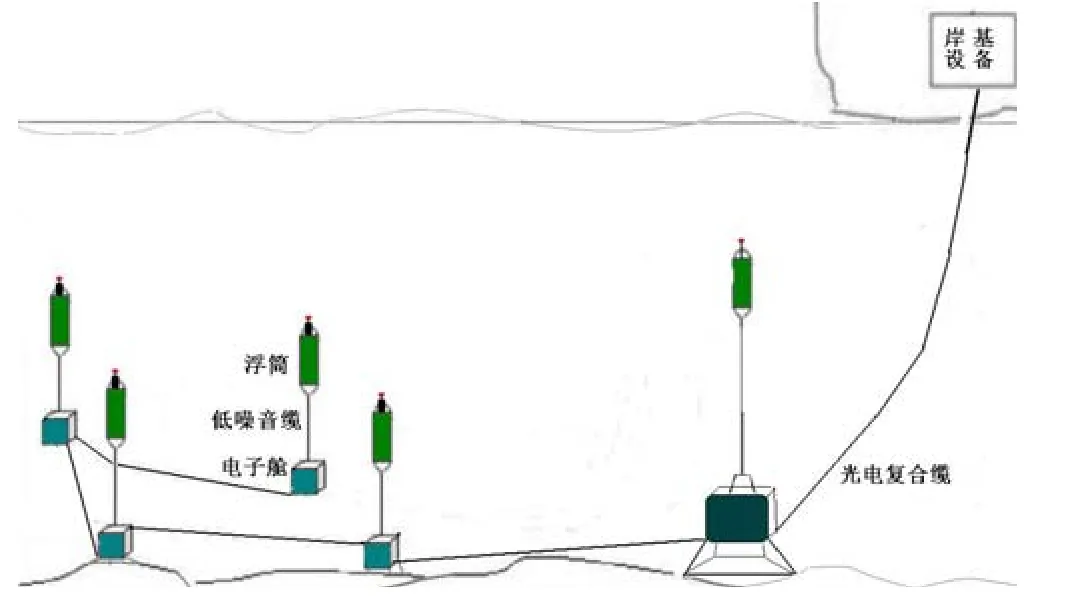
图2 水下网络化综合试验测试系统结构图
2 主要关键技术及解决方案
2.1 多源水下信息融合及网络控制技术[1]
系统所涉及的水下网络数据形式多样、结构复杂,包括:①单向接收:水声跟踪、噪声测量、水声遥测、水文测量等信号;②单向发射:水声遥控等信号;③双向收发:水声通讯等信号;④双向网络控制等信号。针对系统网络以水下光纤网络为主的特点,综合各网络节点所连接信息的多源异构性,对网络数据进行分类信息融合,并利用波分复用和时分复用原理,结合光纤通道全同步传输技术,采用一对多数据传输形式的多节点单缆双路单模光纤双向传输方法,实现多源异构网络数据的实时传输、信息共享与水下网络的有效运行控制。
网络控制设备是水下光纤网络的管理单元,置于岸上机房内,通过光电复合缆与水下基站连接,并与水下基站内的水声网络节点模块配合,构建双环自愈型网络结构,实现各网络节点与岸上测试设备之间的双向数据传输(如图3示):
● 设置路由,进行水下光纤网络自检、故障定位;
● 通过光纤网络向上传输由水下基站处理过的水声跟踪、水声遥测、噪声测量、水声通讯等接收信号,并传输给岸上测量设备;
● 通过光纤网络向水下基站传递水声通讯、水声遥控等发射信号;
● 通过光纤网络向水下基站发送深度等测量命令,并回传测量值;
● 通过光纤网络向升降式水下基站发送测量平台升降命令及噪声、深度、水温、声速等测量命令,并回传测量值。
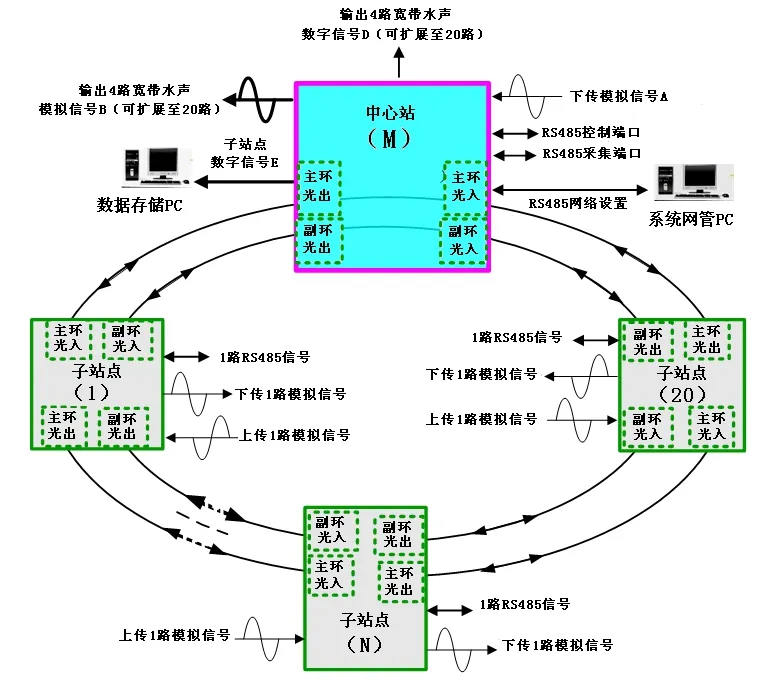
图3 水下网络结构图
2.2 多目标高精度长基线水声跟踪与实时水声遥测技术[2-3]
水声跟踪及水声遥测分系统主要由水声跟踪及水声遥测发射机(装载于水下航行器上)、水下基站、光电复合缆、网络控制设备、水声跟踪及水声遥测设备等组成。
水声跟踪及水声遥测发射机在经 GPS同步信号作用下,实时采集航行目标俯仰、横滚、航深等信息,并进行实时编码,周期性地产生航迹跟踪及姿态参数联合测量的水声信号。
同步跟踪及水声遥测设备主要采用同步定位原理、MFSK水声遥测原理,并结合水下基阵精确定位、航迹跟踪与航行参数联合测量信号体制优化设计、新型传感器开发、异地信号同步采集及实时网络传输、宽频带信号精确检测、多目标频分识别、多普勒频移精确估计及补偿、数据关联及平滑滤波等技术,实现水下目标航行航迹、航行参数的同时测量:由至少 3个以上水下基站组成的测量基阵接收被测目标上发射的航迹跟踪及航行参数联合测量的水声信号,并把调理过的信号经水下光纤网络送给DSP数字信号处理分机进行信号检测、时延测量、信息解码等处理,PC信号处理分机则进行航迹解算、姿态参数测量、数据融合及结果显示等处理,最终得到测量目标的实航航迹及航行参数信息。
2.3 高灵敏度噪声测量技术
噪声测量分系统主要由可升降的水下基站、网络控制设备、噪声测量设备等组成,采用了高灵敏度水听器设计、低噪声前放及差分传输、低噪音电缆设计、数字化远距离光纤传输、软件式同步测距等技术措施,实现水下目标航行辐射噪声的精确测量。
辐射噪声测量时,根据水下目标的航行深度及辐射噪声经验值,通过升降装置将测试平台调整至适当深度;测量系统通过水下基站的接收水听器实时接收、存储被测目标航行时的辐射噪声信号;进行试后回放、分析与处理(距离测量采用软件式同步测距方法,噪声信号分析采用专用的分析软件)。
环境噪声测量时,根据需要测量的深度,通过升降装置将测试平台调整至相应深度;测量系统通过水下基站的接收水听器实时接收存储环境噪声信号,并进行试后回放、分析与处理。
2.4 水下航行器实时水声遥控技术
水声遥控分系统主要由水声遥控接收设备(装载于水下航行器上)、水下基站、水声遥控设备等组成。
水声遥控设备实时接收启动、停车、上浮指定深度、下潜指定深度、设定航行速度、改变航行方向等指令,对指令进行编码、调制、D/A转换等处理,并把遥控信号通过水下光纤网络传输给任一水下基站的功率放大器,经由发射换能器转换为水声遥控编码信号。
水声遥控接收设备采用隔振式高灵敏度接收水听器基阵设计、水声遥控信息实时解码、多普勒频移精确估计及补偿、动基座抗干扰微信号自动检测等技术,实现水下目标航行状态的实时遥控。接收水下基站发射的水声遥控编码信号,并实时解算出水声遥控指令信息,实现对水下航行器的操控。
2.5 水下机动目标高保真水声通讯技术[4]
水声通讯分系统主要由水声通讯收发机(装载于水下航行器上)、水下基站、水声通讯设备等组成,其工作原理为:利用任一水下基站内的发射换能器发射语音通讯编码信号,安装在航行器上的水声通讯收发机接收、处理,并应答;而应答信号则被任一水下基站内的接收水听器接收、处理,由此实现对水下航行器双向的语音水声通讯。
水声通讯系统主要由发射系统、水声信道、接收系统三个部分组成:
● 发射系统:用适当的传感器(如话筒),把原始语音信息转变成电信号送入信源编码器;信源编码器对输入信号进行A/D变换,并完成语音压缩功能,形成低码率的数字信号;对数字信号进行适当的信道编码(如卷积编码、RS编码等),增加信号的冗余度,使具有检错和纠错能力;根据水声信道的特点和要求把信道编码后的信号以适当的方式调制到一定频率的载波上(如 OFDM 调制等);最后送往发射机,经由发射换能器转化为水声通讯信号;
● 水声信道:进行水声通讯信号的传输;
● 接收系统:信号处理过程基本与发射系统一一对应,是一个相反的过程,即:接收信号的预处理(放大、滤波、AD采样),信号解调,信道解码和语音压缩解码;最后重建原始语音信号。
3 系统典型应用
3.1 水下航行器实时跟踪测试
研制的水下综合试验测试系统达到了预期的性能指标,并已投入到多型水下航行器的航迹跟踪等试验,取得了较好的应用效果。图4为利用水下两组基站对水下航行器的水声跟踪航迹图。水平跟踪误差采用与GPS比对的方法,见表1,从表中可以看出水平定位误差可达到0.3%以内,可以满足多数水下航行器的定位精度需求。

图4 水下航行器实航跟踪测试图

表1 水平跟踪误差与DGPS值比对表
3.2 沉底航行器搜索与打捞试验
对沉底航行器打捞潜器的水声语音通讯与导航控制方案如图5所示。

图5 沉底航行器搜索与打捞方案图
沉底航行器由于水底地况复杂等原因,定位范围有所缩小,但水平定位精度不变,也在0.3%以内。航行器实航试验中,利用水声跟踪分系统对产品进行跟踪定位;当航行器故障沉底后,跟踪并确定航行器所在位置;沉底航行器打捞时,利用水声通讯分系统建立与潜器的语音通讯,指挥潜器快速靠近沉底航行器进行打捞回收作业,快捷准确。
4 结束语
水下综合试验测试技术及其系统可直接服务于各种水下航行器的实航试验,既能实现水下目标的实航航迹跟踪与辐射噪声测量、实航参数水声遥测,又能实现对水下航行器的水声遥控、对沉底航行器打捞潜器的水声语音通讯与导航。与此同时,基于水下光纤网络构建的试验测试系统,直接在岸上机房内就可实现全天候的试验测试,既提高了效率,又降低了成本。
[1]段文海. 多路宽带水声信号同步采集及传输技术研究[J].声学与电子工程, 2010,(增刊): 32-36
[2]汪俊, 王海斌, 吴立新. 远程水声通信中的多信号恒包络合成方法[J]. 哈尔滨工程大学学报, 2005, 26(4): 451-456
[3]王翔. 水下个人数字通信关键技术研究[D]. 西北工业大学, 2007.
[4]郭中源, 陈岩, 贾宁, 等. 水下数字语音通信系统的研究和实现[J]. 声学学报, 2008, 33(5):410-418
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17
宁夏师范学院学报(2021年4期)2021-05-15
内蒙古民族大学学报(自然科学版)(2020年5期)2020-12-28
语文世界(小学版)(2019年2期)2019-02-24
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
系统工程与电子技术(2016年7期)2016-08-21
中国教育网络(2016年1期)2016-02-14
小天使·一年级语数英综合(2014年7期)2014-06-26
声学技术(2014年1期)2014-06-21