
面向无线传感器网络节点的脐橙采摘机器人定位研究
2018-04-12 00:52靳继红
农机化研究 2018年4期
田 磊,靳继红
(1.河南工业职业技术学院,河南 南阳 473000;2.焦作师范高等专科学校 计算机与信息工程学院,河南焦作 454000)
0 引言
近年来,随着科技的发展,无线传感器、物联网及智慧地球的发展深入人心,已成为各国家科技和产业竞争的焦点[1-5]。现阶段,传感器、物联网、无线通信、仪器仪表和自动化的快速发展提高了机器人的应用能力,采摘机器人因此获得了长足的发展,已成为科技研究最前沿的领域之一[6-13]。本文以无线传感器网络技术为核心,设计了一种面向网络节点的脐橙采摘机器人定位算法,并利用MatLab进行算法仿真实验,验证了系统的可靠性和稳定性。
1 无线传感器网络技术
无线传感器网络一般由许多具有无线通信、感知环境变化、信息存储与处理的传感器构成,包含多种感知功能不一的传感器节点。这些节点可对目标环境内的信息变化进行采集、判断或数据发送,形成对目标环境实时监控和对目标定位的网络[14-18]。无线传感器网络结构主要包括传感器、汇聚和管理站等部分,其体系结构如图1所示。感知区域到处分布了许多的无线传感器节点,它们以无线网络为平台,通过自组织形式,顺着其它节点逐级跳动传递和交换信息,在多次跳转后集中到汇聚节点,最后由汇聚节点传到远程监控端。无线传感器的核心是嵌入式控制系统,其信息处理和存储空间有限;而汇聚节点信息处理和存储空间明显增强,其可通过无线网络与外部互联网或卫星进行通信,发布管理节点的监测信息。
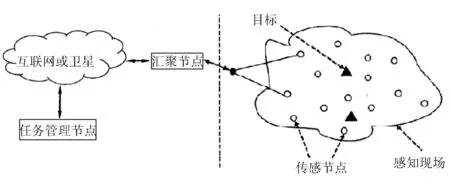
图1 无线传感器网络结构图
无线传感器节点结构分支多,往往和应用目标区域及实现的功能相关,但主要还是由传感器、处理器、无线通讯及电源等4个模块组成,如图2所示。

图2 无线传感器节点框架图
无线传感器节点模块众多:传感器模块根据被测物理信息选用合适的类型,一般采用A/D电路实现模拟信号转化为数字信号;处理器模块是节点最重要的部分,主要负责信息的采集、传输、决策制定、保存和发出控制指令;无线通讯模块则主要负责各汇聚节点间信息的共享;电源模块为各无线传感器和汇聚节点提供能量[19-21]。
2 脐橙采摘机器人系统模型
2.1脐橙采摘机器人运动模型
在实验状态下,即在没有其他外在条件(如环境、天气)干扰的情况下,脐橙采摘机器人运动模型能够形象地表示其各个部件的运动过程[22-25]。但在日常作业中,由于受到环境和天气的影响,采摘机器人会产生一些特定的噪声,使得模型具有一定不稳定性,因而使其不能准确描述采摘机器人运动变化状态[26-27]。为了解决上述问题,特以一种非线性函数对采摘机器人运动状态进行描述,该模型描述了其位姿信息S0,K在控制参数uk和干扰因数wk影响下随时间的变化。采摘机器人某时间节点状态只与上一某时间节点状态及当前某时间节点的控制参数有关,与过去时间节点的信息没有联系。采摘机器人运动方程为
(1)
其中,Dk和θk分别表示采摘机器人与第k个无无线传感器节点的距离和角度。
2.2无线传感网络观测系统模型
本文主要研究问题是面向无线传感器网络节点的脐橙采摘机器人准确定位算法,前面一节主要介绍了采摘机器人运动模型,本节介绍无线传感网络观测系统模型。观测系统模型参数主要是获取采摘机器人和无线传感器网络节点之间的相对距离和角度等信息。该模型表达式为
(2)
其中,i、j表示第i和j个无线传感器网络节点;Si,1,k={Si,1,…,Si,k}表示k时刻采摘机器人和无线传感器网络节点的位置、角度状态;vk表示模型噪声。
该模型观测方程为
(3)
其中,其中rk+1和θk+1分别为第k+1个传感器节点相对于机器人的位置和角度;φ表示机器人经过传感节点前后的角度差。
模型观测函数位姿和传感节点之间的雅克比矩阵为
(4)
(5)

脐橙采摘机器人模型如图3所示。

图3 脐橙采摘机器人模型
3 脐橙采摘机器人定位算法
3.1脐橙采摘机器人环境建模
采摘机器人一般都是在比较复杂的环境中进行作业,因而对采摘机器人而言首要的问题是感知周边环境信息[28]。获得周边环境信息,采摘机器人才能进行定位,顺利开展作业任务。其在目标区域自动定位时,对作业区域现场感知和判断都需要无线传感器网络节点平台的支撑[29]。通过无线传感器网络节点平台,采摘机器人可以与其他环境节点进行信息的传输与交互,进而获取自身位置状态和所在环境的信息[30]。在本设计中,建立无线传感器网络节点平台是研究的重要环节,对脐橙采摘机器人自动定位具有决定性意义。脐橙采摘机器人目标区域传感器网络结构如图4所示。
在目标区域,无线传感器节点分为两种:一种是用来标示障碍物位置;一种用来感知机器人位置。这些节点随机分布在目标区域,并依次贴上电子便签。机器人上安装有RFID射频信号器,随着采摘机器人的移动,无线传感器感知机器人信号强度变化判定与机器人的距离,也方便机器人识别障碍和目标。载有RFID射频信号器的机器人在作业中可以根据两种无线传感节点获取障碍或者自身位置信息。无线传感器和RFID的有效结合为机器人实现了避障和定位功能,大大提高了机器人的自主性和灵活度。
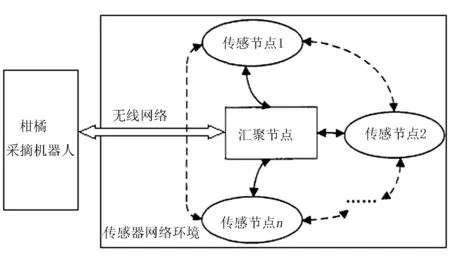
图4 目标区域无线传感器网络结构图
3.2定位算法原理
在无线传感器网络应用中,节点采集信息与其位相互对应,因此确定未知节点的位置对采摘机器人的自动定位具有重要意义。在三维空间坐标中,未知无线传感器网络节点的信号强度与机器人上的RFID射频信号器距离远近的理论分布,如图5所示。
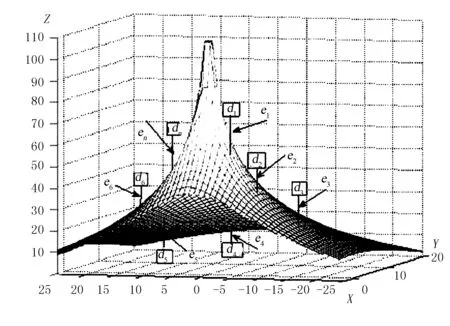
图5 未知无线传感器网络节点的信号强度分布图
图5中:X、Y轴表示RFID射频信号器到无线传感器节点的距离;Z轴表示无线传感器节点接收到的信号强弱;d1、d2、d3、…、dn为无线传感器节点实际位置;e1、e2、e3、…、en为无线传感器节点与实际信号强度之间的偏移量。由于无线传感器节点接收到的信号强度值需要加上随机噪声,因此无线传感器节点信号强度值只与Z向坐标存在一定差异。可以看出,在三维空间坐标中,未知无线传感器网络节点的信号强度构成的曲面形状和路径衰减因子k息息相关,因此可以确定适当的目标函数求出k值和无线传感器网络节点位置坐标。
无线传感器网络节点定位原理为:倘若存在n(n>3)个位置坐标已知无线传感器网络节点,且第i个无线传感器节点对RFID射频信号器的信号强度RSSI(i)也确定,则可以依据信号损耗模型确定目标函数;通过求出其最优解,便能够确定未知无线传感器网络节点的坐标(x,y)和路径衰减因子k。
3.3确定目标函数
依据无线传感器节点定位原理,能够确定合适的目标函数,然后求解出目标函数最优解,便可得到节点的坐标与衰减因子k。为了让节点到曲面的Z向距离最小,即求|Zn(i)-RSSI(i)|或(Zn(i)-RSSI(i))2的最小值,因全部节点个数为n,确定的目标函数为

(6)
(7)
同时,也可以先求所有节点[Zn(i)-RSSI(i)]的和,然后再取其绝对值,则

(8)
3.4算法仿真试验设计
为验证本文设计的脐橙采摘机器人准确定位算法的可靠性,利用MatLab仿真软件、采用M语言进行编程,实现各目标函数进行标定效果分析。在模拟仿真中,无线传感器节点分布在20m×20m的目标区域中,系统按照路径节点编号,实现机器人的自动定位。算法仿真流程如图6所示。
自动定位算法仿真各流程说明如下:
1)设定信标节点。初始化,设定模型参数,1次取100组数据,在MatLab中绘制出模型曲面。
2)加入随机噪声。在理论信号值的基础上加入信号噪声,构成实际信号值。
3)筛选。为了提高采摘机器人定位准确度,筛除掉信号较弱的个别信标节点。
4)确定优化初值。利用极大似然法优化初值。
5)优化计算。利用MatLab中的优化函数进行优化,减少定位误差。
6)输出结果。利用 MatLab 输出结果图。
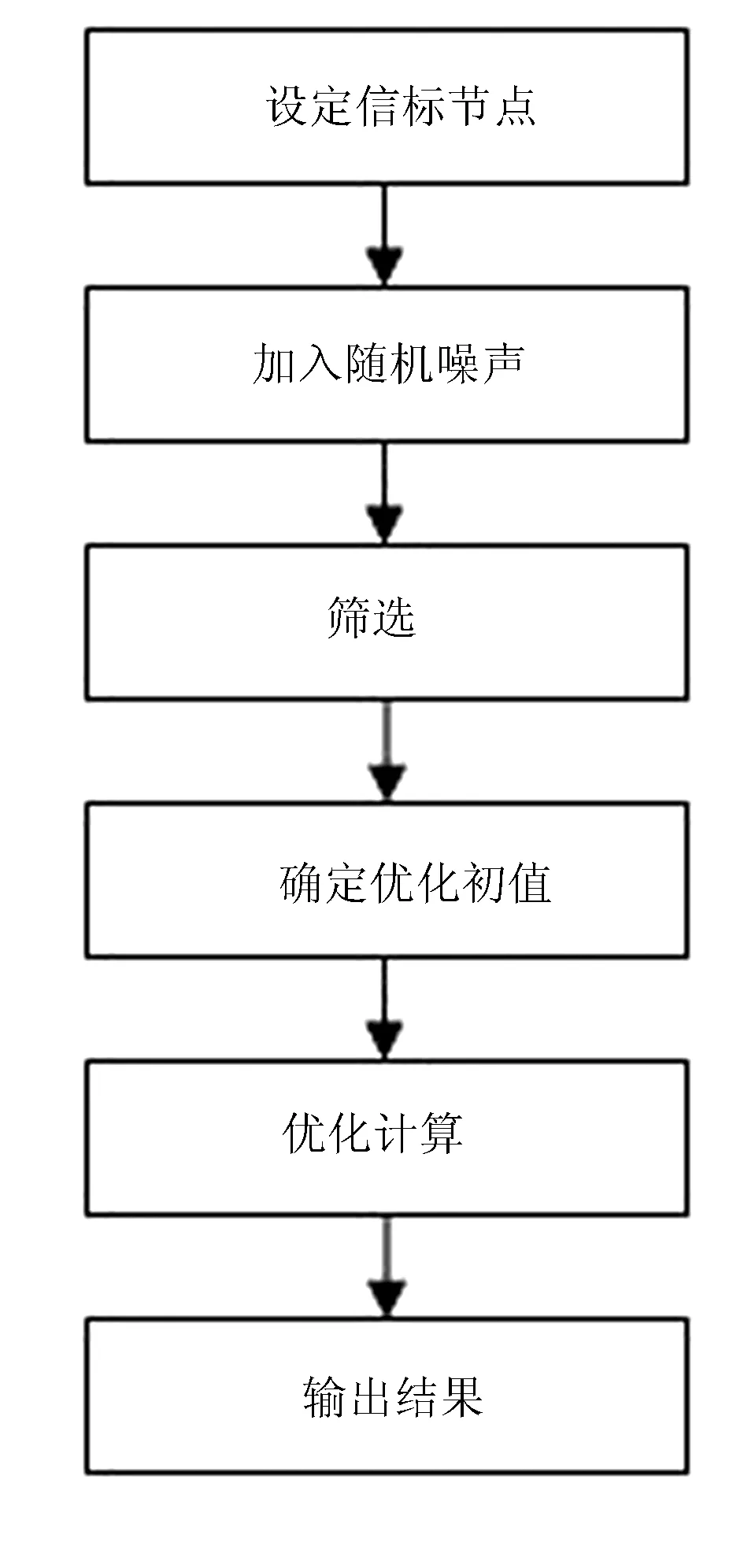
图6 自动定位算法仿真流程图
4 实验与结果分析
为了验证脐橙采摘机器人自动定位算法的准确性和可靠性,在作业区域随机安放了100个无线传感器信标节点,假设每个节点的通信半径为5m,当机器人(即RFID射频信号器)与节点之间的距离超过5m时,则无法收到信号;然后对定位算法行了实验。实验中,由于节点和RFID射频信号器的相对坐标不确定,因此在求解中以采摘机器人初始位姿为基准,建立三维坐标直角系。仿真试验环境和结果如图7所示。
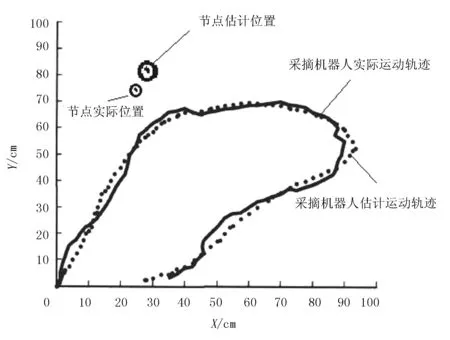
图7 采摘机器人实验结果
图7中,虚、实线分别为采摘机器人估计和实际的运动路径;虚点和实点分别为网络节点估计和实际位置。由图7可以看出:该定位算法能够准确估计采摘机器人的位置,且误差系数小,有效抑制了累计误差的加大,使得机器人估计误差在5cm以内,说明了本文自动定位算法的准确性和可行性。
5 结论
首先分析了无线传感器技术特点、原理及其优越性,然后对脐橙采摘机器人的运动模型和传感网络观测系统模型进行阐述。根据实际需求,设计研究了一种面向无线传感技术的定位算法,采用极大似然法确定优化初值,根据目标函数并利用MatLab进行函数优化,提高定位准确度。系统将RFID和无线传感器网络技术相结合,应用于采摘机器人的自动定位,对实现果实种植无人化具有重要现实意义。实验结果表明:该定位算法能够准确估计采摘机器人的位置,且误差系数小,使得机器人估计误差在5cm以内,说明了本文自动定位算法的准确性和可行性。
参考文献:
[1]吴显.基于多传感器信息融合的移动机器人定位方法研究[D].北京:北京交通大学,2016.
[2]王亚子,杨建辉.改进粒子群算法的无线传感器网络节点定位[J].计算机工程与应用,2014(18):99-102.
[3]王卫星,高奕龙,陈佳森.基于Zigbee无线传感器网络的山地橘园精细化滴灌系统设计[J].电子技术与软件工程,2014(14):19-20.
[4]徐红军.无线传感器网络环境下移动机器人节点定位算法研究[D].长沙:湖南工业大学,2014.
[5]陈剑.无线传感器网络技术在多点控制中的应用与研究[D].北京:北京服装学院,2013.
[6]杨冬梅.基于无线传感器网络的多移动机器人避障方法研究[D].哈尔滨:哈尔滨工业大学,2013.
[7]马伟.基于无线传感器网络的室内定位系统节点的设计与实现[D].成都:电子科技大学,2013.
[8]王方.基于多移动机器人的无线传感器网络系统[D].太原:太原理工大学,2013.
[9]石海霞.面向机器人定位的无线传感器网络系统的研究与设计[D].南京:南京理工大学,2013.
[10]薛粹瑶.室内无线传感器网络中转发节点的最优放置问题研究[D].上海:上海交通大学,2013.
[11] 李江洪.基于无线传感节点到达时间差的定位算法设计[J].广西民族大学学报:自然科学版,2012 (4):60-63.
[12]赵旭.基于无线传感器网络的移动机器人定位与导航系统研究[D].沈阳:辽宁科技大学,2012.
[13]苟胜难.基于改进的RSSI无线传感器网络节点定位算法研究[J].计算机应用研究,2012(5):1867-1869.
[14]黄光华.基于无线传感器网络的森林火灾监测系统的设计与研究[D].南昌:江西理工大学,2012.
[15]钟智.具有移动节点的无线传感器网络定位算法和数据收集协议研究[D].长沙:中南大学,2012.
[16]郑林.基于无线传感器网络的移动节点定位算法研究[D].沈阳:东北大学,2011.
[17]陈荣,单志龙.大规模水下无线传感器网络定位误差抑制研究[J].计算机与现代化,2011(5):87-91.
[18]牛宇卿.基于无线传感器网络的无线粮情监控系统的设计与实现[D].太原:太原理工大学,2011.
[19]颜文胜.无线传感器网络节点部署算法的优化研究[J].计算机仿真,2011(4):126-129.
[20]佟玲.无线传感器网络应用平台系统网络层的设计与实现[D].长春:吉林大学,2011.
[21]陈妮.无线传感器网络的密钥预分配管理方案研究[D].成都:电子科技大学,2009.
[22]傅思遥,潘秀琴,赵悦.一种基于室内环境无线传感器网络的移动机器人定位法[J].中央民族大学学报:自然科学版,2009(1):57-63.
[23]端木庆敏.无线传感器网络节点定位算法研究[D].长沙:国防科学技术大学,2006.
[24]白波.无线传感器网络节点自身定位算法的研究[D].沈阳:东北大学,2008.
[25]陈红亮.室内无线传感器网络环境下移动机器人路径跟踪的研究[D].武汉:武汉理工大学,2008.
[26]杨秀萍,刘嵩岩.基于无线传感器网络的移动机器人定位导航系统[J].电子器件,2007(6):2265-2268.
[27]潘建国.传感器定位节点的应用设计与实施[J].安徽工程科技学院学报:自然科学版,2007(4):72-75.
[28]俞黎阳.无线传感器网络网格状分簇路由协议和数据融合算法的研究[D].上海:华东师范大学,2008.
[29]梁华为,陈万明,李帅,等.基于无线传感器网络的移动目标导航方法[J].传感技术学报,2007(7):1620-1624.
[30]刘宝栋.网格环境下无线传感器网络数据融合研究[D].太原:太原理工大学,2007.
猜你喜欢
今日农业(2022年3期)2022-11-16
中学生数理化·七年级数学人教版(2022年6期)2022-06-05
无线互联科技(2021年4期)2021-04-21
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年9期)2020-02-06
中国外汇(2019年20期)2019-11-25
小猕猴智力画刊(2019年3期)2019-04-19
电子制作(2018年23期)2018-12-26
电子制作(2018年19期)2018-11-14
天津诗人(2017年2期)2017-03-16
