转子系统变刚度动力吸振器试验研究
2018-05-23 06:05姚红良王童照曹焱博闻邦椿
振动与冲击 2018年9期
姚红良, 王童照, 曹焱博, 闻邦椿
(东北大学 机械工程与自动化学院,沈阳 110819)
振动过大往往会威胁旋转机械的稳定运行,严重时可导致停机甚至机毁人亡的重大事故。因此,从机理上分析转子系统振动产生的原因,合理地对旋转机械抑振[1]或吸振[2]是保证设备安全、稳定运行的关键。
变刚度控制是一种常用的振动控制方法,通常可以采用电磁方法[3]、形状记忆合金、磁流变弹性体[4]、压电陶瓷等实现刚度调整。如文献[5]采用电磁轴承控制转子系统的不平衡振动;文献[6-7]采用形状记忆合金设计的变刚度减振来改变转子系统的刚度,从而合理的避开临界转速区;文献[8]采用压电陶瓷改变滑动轴承的状态,实现刚度的改变等。
除以上方法外,近年来永磁体逐渐被应用于结构的减振,以永磁体为基础的减振设备具有耗能小、结构简单等优点,因此比较适用于转子系统的减振控制。
永磁体之间通过适当地配置可以形成刚度机构,且这种机构的刚度与磁铁的间距有关[9]。因此,本文提出一种永磁变刚度动力吸振器,通过调节磁铁的间距来改变吸振器的工作频率范围,进而对转子系统的振动进行控制。通过理论分析和试验,验证了该吸振器的有效性。
1 变刚度动力吸振器结构及模型
1.1 变刚度动力吸振器结构
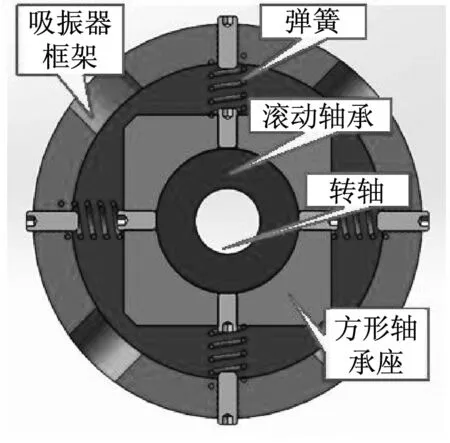
变刚度动力吸振器放置于转轴之上,如图1(a)所示。该吸振器由两部分组成,第一部分是吸振器框架,通过对称放置的弹簧安置于方形轴承座上,从而与转轴相连,如图1(b)所示;第二部分是永磁变刚度部分,分置于吸振器框架两侧,如图1(c)所示。
理论上,当图1(b)所示结构的固有频率与转子转速相同时,转子系统的振动将完全被吸收到吸振器上。但是转子系统的转速可能会发生变化,从而导致吸振器的效率下降。为解决此问题,可以调整永磁变刚度机构的刚度,使吸振器的固有频率随转速变化而变化。表1给出了主系统与吸振器的相关参数。

(a) 吸振器放置位置
(b) 吸振器框架结构

(c) 吸振器整体结构

参数数值参数数值主系统质量m11吸振器质量m20.1主系统阻尼c13吸振器阻尼c21主系统刚度k19吸振器刚度k22吸振器阻尼cm0吸振器刚度km可调
1.2 永磁刚度计算方法
负刚度机构由圆形永久磁铁产生,详细原理见文献[10]。这里仅做简单介绍:该结构中的外磁铁与吸振器框架相连,内磁铁通过轴承与转轴相连。由于内外磁铁磁极相反,因此内外磁铁之间形成径向相斥力Fy。该相斥力对内外磁铁径向位移e求导即可以形成内外磁铁间的非接触连接刚度
(1)
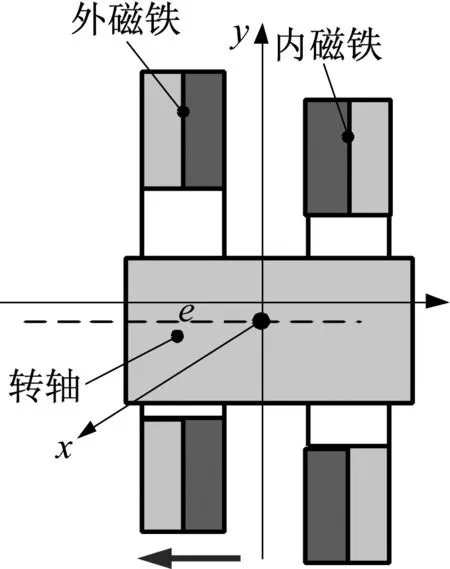
图2 永磁刚度机构结构
该刚度为负刚度,其大小与内外磁铁的间距有关系,间距大时刚度小,间距小时刚度大。文献[10]的计算表明,在内外磁铁间距较大时产生的负刚度线性度较好,可以近似按线性计算。
1.3 变刚度动力吸振器工作原理
半主动动力吸振器可以通过改变自身的动力特性参数(质量、刚度、阻尼),使其固有频率跟踪主系统外干扰频率,从而扩大吸振器的有效工作范围。本文设计的就是这样一种可调刚度的动力吸振器。

图3 转子-吸振器系统的动力学模型
因为常规转速下单盘转子系统的动力学行为主要决定于第一阶临界转速,因此将转子-吸振器系统简化为图3所示的动力学模型,建立振动微分方程为
(2)
式中:m1、k1和c1为转子系统的质量、刚度和阻尼;m2、k2和c2为吸振器框架的质量以及弹簧的刚度和阻尼;km和cm为永磁变刚度机构的刚度和阻尼;主质量m1受到了幅值大小为F1的正弦激励作用;r1和r2分别为转子和吸振器的径向位移;me和δ为转子系统的偏心质量和偏心距。ω是转子系统的转速。
因为系统中阻尼一般很小,忽略阻尼后,式(2)可以简化为式(3)
(3)
由式(3)可得转子系统和吸振器的振幅如式(4)所示
(4)
由式(4)可以看出,只要k2+km-m2ω2=0,就有
(5)
因此可以调整永磁变刚度机构中内外磁铁的间距,使系统实时满足式(5),从而达到最好吸振效果。此时,吸振器具有最佳的吸振效果。激振力的频率满足式(6)
(6)
若永磁式变刚度机构的刚度变化范围为km min~km max,根据式(7)和式(8)可以得出永磁式变刚度机构吸收振动频率的最小值和最大值满足
(7)
(8)
则通过连续改变吸振器刚度,吸振器的可在(ωmin,ωmax)频率范围内有效减振。据此,我们可以得出结论:随着外激励的频率ω发生变化,可以通过改变吸振器的外置磁弹簧的刚度km使得k2+km-m2ω2=0,此时主系统的振幅B1=0恒成立,从而可以在较宽的频域范围内达到吸振的目的。
2 试验台及控制策略
2.1 试验台结构
转子-永磁变刚度吸振器试验台如图4(a)所示。实验台整体二维机械图如图4(b)所示。吸振器(见图4(c))通过滚动轴承与转子相连接,方形轴承座通过弹簧与吸振器的外框相连接,同时用紧定螺钉将内侧磁铁固定于吸振器上来实现变刚度机构的内侧磁铁配置,外侧磁铁固定于由步进电机驱动的丝杠机构上。
吸振器安装在转轴上,通过步进电机可以调节动静磁铁的间距来改变吸振器的刚度,同时依靠同步带来保证两电机转动的同步以防止驱动机构卡死。实验通过电涡流传感器来测量转子在竖直和水平方向的振动信号,通过加速度传感器测量吸振器的信号。

(a) 试验台整体结构

(b) 试验台二维机械图

(c) 吸振器结构
图4 转子-永磁变刚度吸振器试验台
Fig.4 Rotor-permanent magnet tunable stiffness vibration absorber test-rig
2.2 PID控制的LabView编程
永磁变刚度动力吸振器的控制部分主要由PC机、CompactRIO系列控制卡、步进电机及其驱动器、永磁变刚度吸振器等组成。其中PC机用于显示和存储数据;CompactRIO系列控制卡通过编写实现数据采集、PID(Proportion Integration Differentiation)控制过程运算并且输出信号控制步进电机;步进电机通过丝杠将圆周运动转换为外磁铁的直线往复运动,使外磁铁靠近或者远离,达到变刚度的目的。
理论上,如果结构参数等能准确辨识出,可以辨识出转子工作转速后直接调节永久磁铁机构的间距来达到反共振点。但是实际中结构参数很难辨识的完全准确,因此采用PID方法实现控制过程,它主要由采集硬件、控制策略、输出硬件、执行机构、控制目标等五部分组成,其流程图如图5所示,其中E(k)是设置的振动阈值。

图5 PID控制器流程图
程序界面如图6所示,可以直接将控制过程的振动状态显示出来。
程序主要由数字滤波模块、偏差比较及显示模块、方向控制模块、锁定模块和PID算法控制模块等组成。

图6 程序界面
(1)数字滤波模块。
数字滤波模块主要是为了保证测得的振动振幅的准确性。通过将每个采样周期采集到的振动数据平均分为N份,求出每一份中的最大值作为振动的幅值。最后将求得的N个幅值相加后除以份数N求得均值。这样可以排除瞬间激励对转子振动产生的扰动,增强控制系统的稳定性。
(2)振动偏差比较及显示模块。
其功能是计算振动的实际值与指定值之间的偏差,并实时显示振动幅值变化曲线。方法为将设定的振动值与采集到的振动值比较,其差值为振动偏差,将此偏差作为PID控制算法的输入。同时,将转子系统的幅值用波形图控件显示出来,以便于实时观察振动控制效果。
(3)PID控制算法模块。
为了方便起见,在此采用LabView中的PID模块中自带的PID VI,采用位置式PID算法的方式进行编写。该模块的输入量为转子的振动幅值与设定值之间的偏差,输出量为脉冲个数,用来控制步进电机的转动角度。同时,PID的三个参数可以通过前面板的输入控件进行调节,输出信号的范围也可以进行设置。
通常,PID的输出值有正负之分,但是由于系统采用脉冲个数来控制步进电机的运行位移,且脉冲的个数不能为负值,故要将PID算法得到的输出量转变为脉冲个数,就应该对其取绝对值。
(4)方向控制模块。
步进电机的转向可以分为正转和反转。电机的正反转则由上一次采集的幅值和最新一次采集获得的幅值相比较而获得。倘若测得的偏差满足E(k)-E(k-1)≤0,说明电机转向使得转子振动趋于减小,则保持上一次的转向不变;倘若测得的偏差满足E(k)-E(k-1)≥0,说明电机转向使得转子振动趋于增大,则改变电机的转向。
为了给电机提供足够的执行时间,对采集到的振动值采取了延时1 s的处理,即每隔1 s获取一次系统的振动值。仅当振动幅值更新时,步进电机才启动执行一次。
(5)自锁模块。
在实际应用中,振动信号的实际值不可能与设定值达到完全相等,倘若为了追求绝对的相等就会使得系统陷入无尽的微调而影响系统的稳定性,此时就应该对其设置合适的阈值。当偏差满足|E(k)|≤阈值时,将步进电机驱动器的自锁控制端输入信号T,这时系统将自动忽略小于阈值的偏差,以避免步进电机过小的微调而导致系统陷入不稳定的状态。
3 试验结果
3.1 永磁变刚度机构有效性验证
为了验证变刚度机构减振效果,首先应该测量不安装任何结构时,转子系统的振动信号,测得转子系统的幅频特性曲线如图7所示。同理,可测得安装变刚度机构后,不同磁铁间距下,转子系统的幅频特性曲线如图8所示。

图7 未加变刚度机构Fig.7 No variable stiffness mechanism
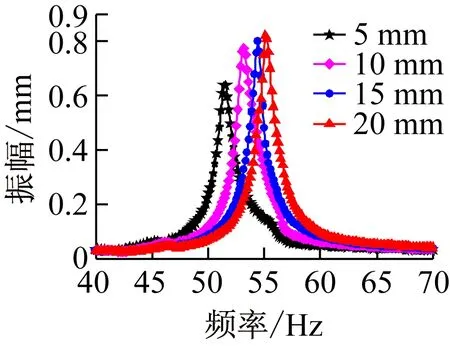
图8 加变刚度机构Fig.8 Variable stiffness mechanism
由图7可知,转子系统的幅频特性曲线在59 Hz左右存在一个共振峰,这个频率就是转子系统的固有频率。
从图8可以看出,在增加变刚度机构后,转子系统的固有频率总体减小且振幅有下降的趋势。未加变刚度机构时,转子系统的固有频率为59 Hz,添加变刚度机构后转子系统的固有频率的变化范围为52~55 Hz。当磁铁间距在5~20 mm内变化时,系统临界转速随磁铁间隙的减小而减小。因此,通过安装永磁变刚度机构能够实现平稳过共振。
3.2 扫频吸振效果验证
其次进行扫频时进行吸振效果验证。测得转子-吸振器系统在不同磁铁间距下的幅频特性曲线如图9所示。
图9(a)为测得转子系统幅频特性曲线。可以看出,随着磁铁的间距减小,转子-吸振器系统的反共振点位置逐渐减小。当磁铁的距离由15 mm减小到5 mm时,反共振点的位置也由58 Hz减小到了45 Hz左右。
图9(b)为吸振器的幅频特性曲线。由图可知,吸振器的幅频特性曲线与转子的相似,但是吸振器的振动幅度远大于转子的振动。这表明吸振器吸收了大部分的振动能量,从而使转子的振动降下来。
为了更为直观的分析磁铁间距对吸振效果的影响,图9(c)从时域角度对其进行了分析。可以看出,若激励的频率为45 Hz,系统在磁铁间距为5 mm时处于反共振状态,此时转子系统的振幅约为0.018 mm。此时,无论如何改变磁铁的间距,系统的振幅都将增大。
以上试验分析表明,当磁铁的间距在有效范围内连续变化时,永磁变刚度动力吸振器可以在较宽的频率范围内减小转子的振动。
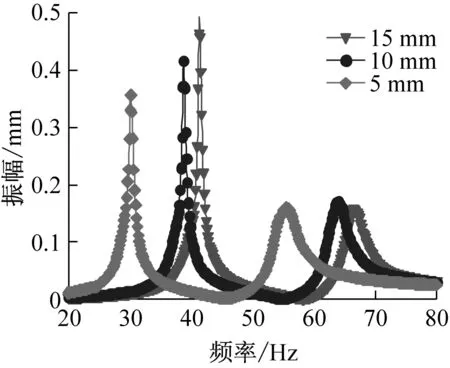
(a) 转子系统

(b) 吸振器

(c) 时域信号
3.3 转子定转速控制试验验证
为了验证PID控制算法对转子-永磁变刚度吸振系统在45~60 Hz任意转速下的吸振效果,下面以55 Hz为例来说明,结果如图10和图11所示。
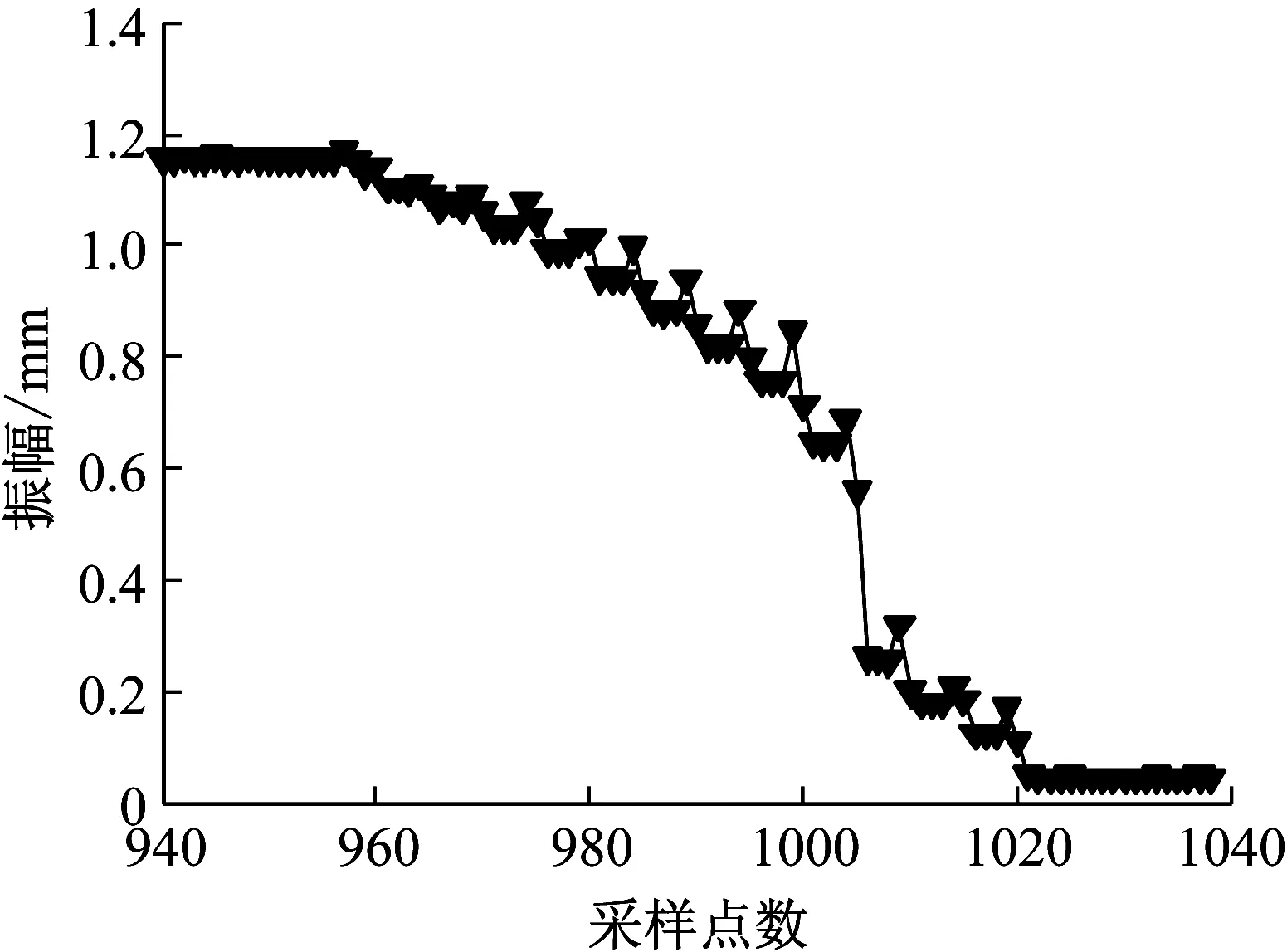
图10 PID控制过程振幅变化图

图11 PID控制前后时域对比图
在PID控制之前,转子系统的振幅高达1.16 mm。随着控制过程的进行,转子的振幅逐渐减小。当振幅下降到0.07 mm时,振动达到最小值并稳定在该处。在整个控制过程中,每当电机启动的时候,转子振动的瞬间增大并产生尖锐的峰值,但是从总体上来看,转子系统的幅值发生了较大的减小的趋势是正确的。
为了更加直观的看出吸振的实际效果,试验测试了控制前后转子系统的时域信号如图11所示。在控制之前,磁铁的间距保持3~18 mm的任意一个值,转子振幅较大时,观察效果明显,调整磁铁间距,当振幅在1.16 mm左右时,施加控制作用,磁铁的间距自动进行调整,调整后转子系统的振幅降至0.07 mm。
由以上的分析可见,通过PID控制算法可以控制永磁变刚度吸振器调整自身的刚度来降低转子系统的振动,因而具有较宽的吸振范围。
4 结 论
试验验证了动力吸振器的有效性,其设计方法和理论可以为生产实际提供思路参考,为日后探究实用性意义打下基础。本文提出了以永磁变刚度机构作为弹性元件的动力吸振器模型及结构,搭建了永磁变刚度吸振器-Bently转子试验台和控制系统,并对吸振器的效果进行试验验证,所得主要结论如下:
(1)固定频率下吸振器的吸振效果测试表明永磁变刚度机构在本吸振器中有效,可以通过调整磁铁间距实现吸振器处于反共振状态。
(2)扫频试验表明,当磁铁的间距在有效范围内连续变化时,永磁变刚度动力吸振器可以在较宽的范围内减小转子的振动。
(3)基于PID控制策略对永磁变刚度吸振器进行控制。通过对定转速下转子系统的控制实验可以得出结论:永磁变刚度吸振器可以在45~60 Hz内有效降低转子系统的振动。
参 考 文 献
[1] 王四季,廖明夫. 弹支干摩擦阻尼器在线控制转子失稳[J]. 振动测试与诊断, 2012, 32(2): 323-326.
WANG Siji, LIAO Mingfu. Online control of rotor system instability by elastic support/dry friction damper[J]. Journal of Vibration, Measurement & Diagnosis, 2012, 32(2): 323-326.
[2] 王晨阳,何立东. 转子动力吸振器在线抑制多跨转子过临界振动的实验研究[J]. 中国电机工程学报, 2015,35(18): 4715-4724.
WANG Chenyang, HE Lidong. Experimental study on over-critical speed vibration online control of multi-span rotors by rotor dynamic vibration absorber[J]. Proceedings of the CSEE, 2015,35(18): 4715-4724.
[3] LIU Xueguang, FENG Xiaoxiao, SHI Ye,et al. Development of a Semi-Active electromagnetic vibration absorber and its experimental study[J]. Journal of Vibration Acoustics, 2013, 135(5): 510151-510159.
[4] KOMATSUZAKI T, IWATA Y. Design of a real-time adaptively tuned dynamic vibration absorber with a variable stiffness property using magnetorheological elastomer[J]. Shock and Vibration, 2015, 2015: 1-11.
[5] 刘超,刘刚,盖玉欢. 基于磁力等效原理的刚性磁悬浮转子系统高精度在线动平衡[J]. 振动与冲击, 2016,35(4): 67-71.
LIU Chao, LIU Gang, GAI Yuhuan. Field balancing for a magnetically suspended rigid rotor based on magnetic forces equivalence principle[J]. Journal of Vibration and Shock, 2016,35(4):67-71.
[6] MA Yanhong, ZHANG Qicheng, ZHANG Dayi,et al. A novel smart rotor support with shape memory alloy metal rubber for high temperatures and variable amplitude vibrations[J]. Smart Mater Struct, 2014, 23(12):125016.
[7] 任勇生,杜成刚,刘养航. 具有形状记忆合金弹簧支承的转子系统的动力稳定性研究[J]. 振动与冲击, 2016,35(5): 70-74.
REN Yongsheng, DU Chenggang, LIU Yanghang. Dynamic stability of a rotor-bearing system with shape memory alloy support[J]. Journal of Vibration and Shock, 2016,35(5):70-74.
[9] WU Wenjiang, CHEN Xuedong, SHAN Yuhu. Analysis and experiment of a vibration isolator using a novel magnetic spring with negative stiffness[J]. Journal of Sound and Vibration, 2014, 333(13): 2958-2970.
[10] YAO Hongliang, CHEN Zidong, WEN Bangchun. Dynamic vibration absorber with negative stiffness for rotor system[J]. Shock and Vibration, 2016, 2016: 1-13.
猜你喜欢
防爆电机(2021年5期)2021-11-04
汽车实用技术(2021年16期)2021-09-09
上海大中型电机(2021年2期)2021-07-21
噪声与振动控制(2015年4期)2015-01-01
噪声与振动控制(2015年4期)2015-01-01
组合机床与自动化加工技术(2014年12期)2014-03-01
振动工程学报(2014年2期)2014-03-01
汽车电器(2014年8期)2014-02-28
为了孩子(孕0~3岁)(2009年4期)2009-03-30
祝您健康(1987年3期)1987-12-30