多轴载重车侧翻模型研究
2018-05-23 10:24董晓彤
振动与冲击 2018年9期
刘 伟, 姜 毅, 董晓彤, 魏 恒
(1. 北京理工大学 宇航学院,北京 100081; 2. 清华大学 自动化系,北京 100081)
车辆侧翻是一种非常危险的交通事故,美国高速公路交通安全管理局的统计数据表明,在所有的交通事故中,由车辆侧翻引起的交通事故为2.1%,而其导致的死亡率却高达10.6%[1]。多轴载重车一般具有尺寸大、质量大、质心高等特点,这导致其快速行驶过程中更易发生侧翻事故。
车辆的三自由度动力学模型能够同时考虑车辆的侧向、横摆和侧倾特性,因此,对于车辆的侧翻动力学研究,以及对于车辆的防侧翻预警控制研究,许多学者[2-6]都以车辆的三自由度侧翻模型为研究基础。朱天军[7]建立了重型车辆的线性三自由度侧翻模型,并用Trucksim进行了仿真验证;金智林[8]建立了线性轮胎动力学模型,并在其基础上建立了车辆线性三自由度模型,然后将其转换为状态方程进行求解;王健等[9]在传统的线性三自由度车辆模型的基础上引入反正切函数描述轮胎侧偏角侧向力的非线性关系,建立了扩展三自由度车辆模型;Takano等[10]建立了三自由度车辆模型,模型中考虑了车辆质心高度的变化和滚转转向等因素,研究了其对车辆动力学的影响。
本文以多轴载重车为具体对象,研究其侧翻动力学模型。在车辆的三自由度侧翻模型中,考虑了车辆采用的前后多轴转向系统动力学问题,同时,为了使数学模型尽可能的接近实车模型,模型中考虑了轮胎侧偏刚度的非线性特性和车辆油气弹簧刚度的非线性特性,并通过实车实验进行了验证。考虑到线性模型的计算速度明显优于非线性模型,进一步研究了模型中的轮胎侧偏刚度和整车侧倾刚度分段线性化后对车辆姿态响应的影响。
1 非线性三自由度数学模型的建立
车辆发生侧倾时,主要的三个自由度为侧向、横摆和侧倾,因此可以将车辆简化为以上三个自由度的侧翻模型。模型坐标系原点固定在车辆质心横截面与车辆侧倾中心轴线的交点,坐标系的X轴方向为车辆的前进方向,坐标系的Z轴方向垂直车体向上,坐标系的Y轴方向与X轴、Z轴方向满足右手螺旋定则。模型示意图如图1所示。

(a)(b)
图1 多轴载重车三自由度动力学模型
Fig.1 Three degree of freedom dynamics model of multi-axle truck
为了对复杂的车辆模型进行简化,对模型进行如下假设:
假设1 直接将前轮转角作为转向输入,忽略转向系统传动及响应的影响;
假设2 不考虑车辆的俯仰运动;
假设3 假设左右车轮的轮胎特性完全相同;
假设4 将车辆的悬架用车辆整体侧倾刚度和阻尼进行等效简化;
假设5 忽略空气作用力的影响;
假设6 假设车辆质量均匀分布;
Kim[11]研究表明,对于多轴车辆,前后轮组合转向策略优于前轮转向策略,根据实车的转向方式,本文建立了前后转向的车辆侧翻模型;同时,模型中采用非线性侧偏刚度对轮胎的侧偏非线性特性进行描述。
1.1 转向轮转角关系
由阿克曼转向原理可得
(1)

(2)
式中:li1为第i轴到车辆一轴的距离。
1.2 轮胎侧偏角和侧向力
由刚体运动学中两点之间的速度公式可得
(3)

(4)
式中:αi为轮胎侧偏角;β为车辆质心速度偏移角。求解上述方程组,可得车辆的轮胎侧偏角
(5)
式中:Vx为车辆X方向的速度。
轮胎侧向力的计算公式为
Fi=kiαi
(6)
式中:Fi为第i轴轮胎侧向力;ki为第i轴轮胎侧偏刚度。轮胎侧偏刚度与轮胎垂向载荷、轮胎侧偏角度有关,根据图6(b)中轮胎侧偏刚度曲线的数据,实时查表计算。
1.3 三自由度数学模型
基于以上分析,同时考虑车辆的力和力矩平衡,建立车辆三自由度数学方程为
(7)

2 三自由度数学模型的计算机仿真
用Matlab/Simulink对车辆数学模型进行仿真,仿真过程如图2所示。其中,‘input v’和‘input δ’为模型速度输入和方向盘转角输入;‘compute force’模块进行轮胎侧向力的计算;‘equ-1’、‘equ-2’和‘equ-3’分别对三自由度数学模型中的三个动力学方程进行求解。
模型中的车辆参数根据实车确定,模型中的主要参数如表1所示,模型仿真结果如图4、图5所示。
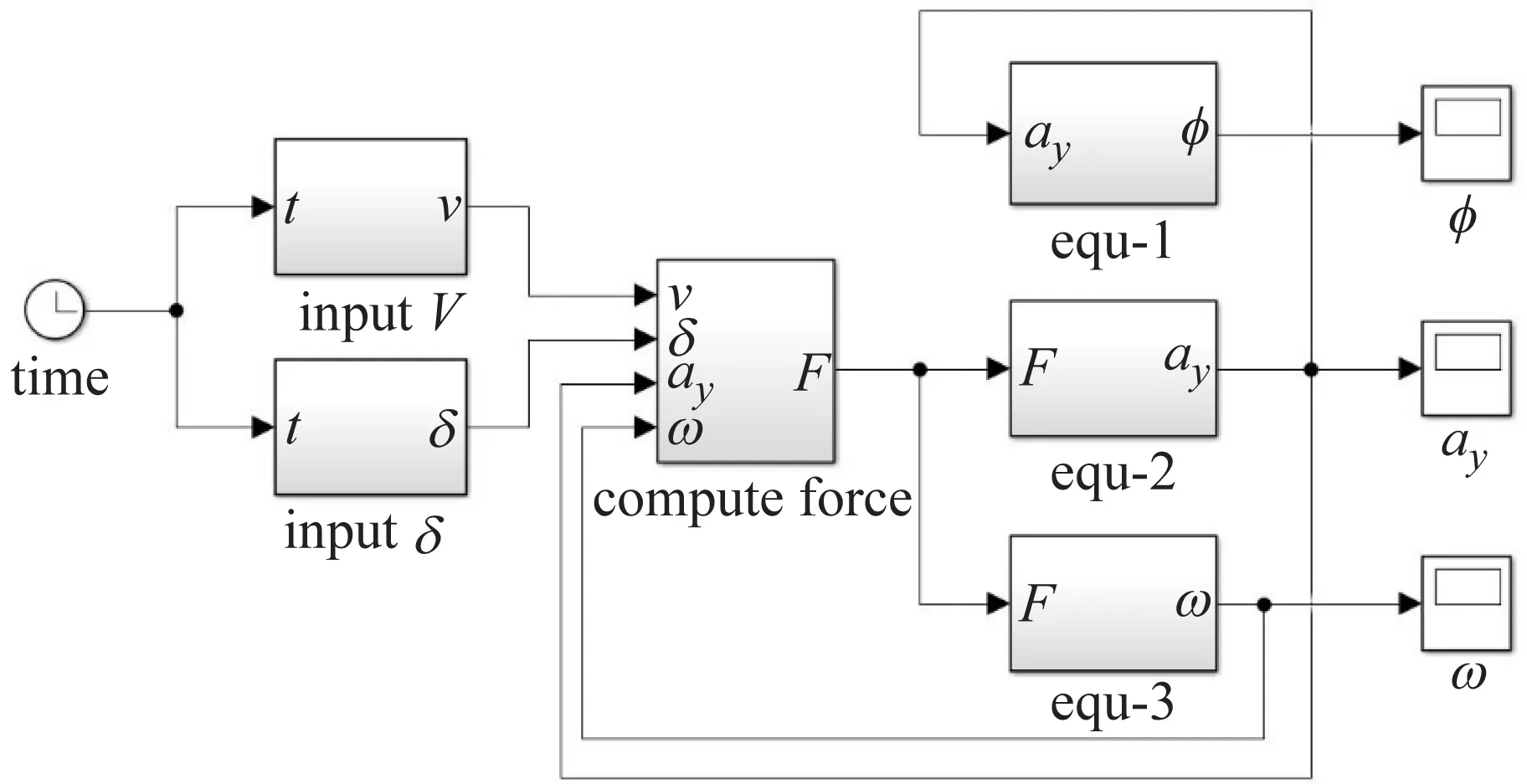
图2 Matlab/Simlink模型仿真

参数数值参数数值ms/t90g/(m·s-2)9.8m/t120hs/m0.8Ix/(kg·m2)4×105cϕ/(N·m·(rad·s-1))5.0×105Iz/(kg·m2)3×106
3 实验研究及其结果分析
3.1 实验设置
根据国家标准《汽车操纵稳定性实验方法》,我们进行了阶跃实验(转向瞬态响应实验)和蛇形实验。实验过程中,为了使车辆的侧倾更加明显,在保证车辆和实验人员的安全下,尽可能提高每种工况下车辆的行驶速度。阶跃实验中,进行了10 km/h、15 km/h、18 km/h和21 km/h四个速度等级的实验;蛇形实验中,进行了15 km/h、20 km/h、25 km/h、30 km/h和35 km/h五个速度等级的实验。
实验的输入信号为车辆的行驶速度和方向盘转角,输出信号为车辆的侧向加速度和侧倾角度。实验中,HCZ-1A方向盘力角测量仪安装在车辆的方向盘上,对方向盘的转角进行测量;XW-GI5651陀螺仪安装在车质心截面的车顶位置,对车辆的速度、侧倾角度和侧向加速度进行测量,如图3(a)所示;数据采集盒安装在车辆顶部,对方向盘力角测量仪和陀螺仪的测量数据进行实时采集,并传送至实验电脑,如图3(b)所示。

(a)XW-GI5651陀螺仪(b)数据采集盒
图3 传感器及数据采集装置
Fig.3 Sensors and data acquisition devices
3.2 结果对比分析
3.2.1 阶跃实验
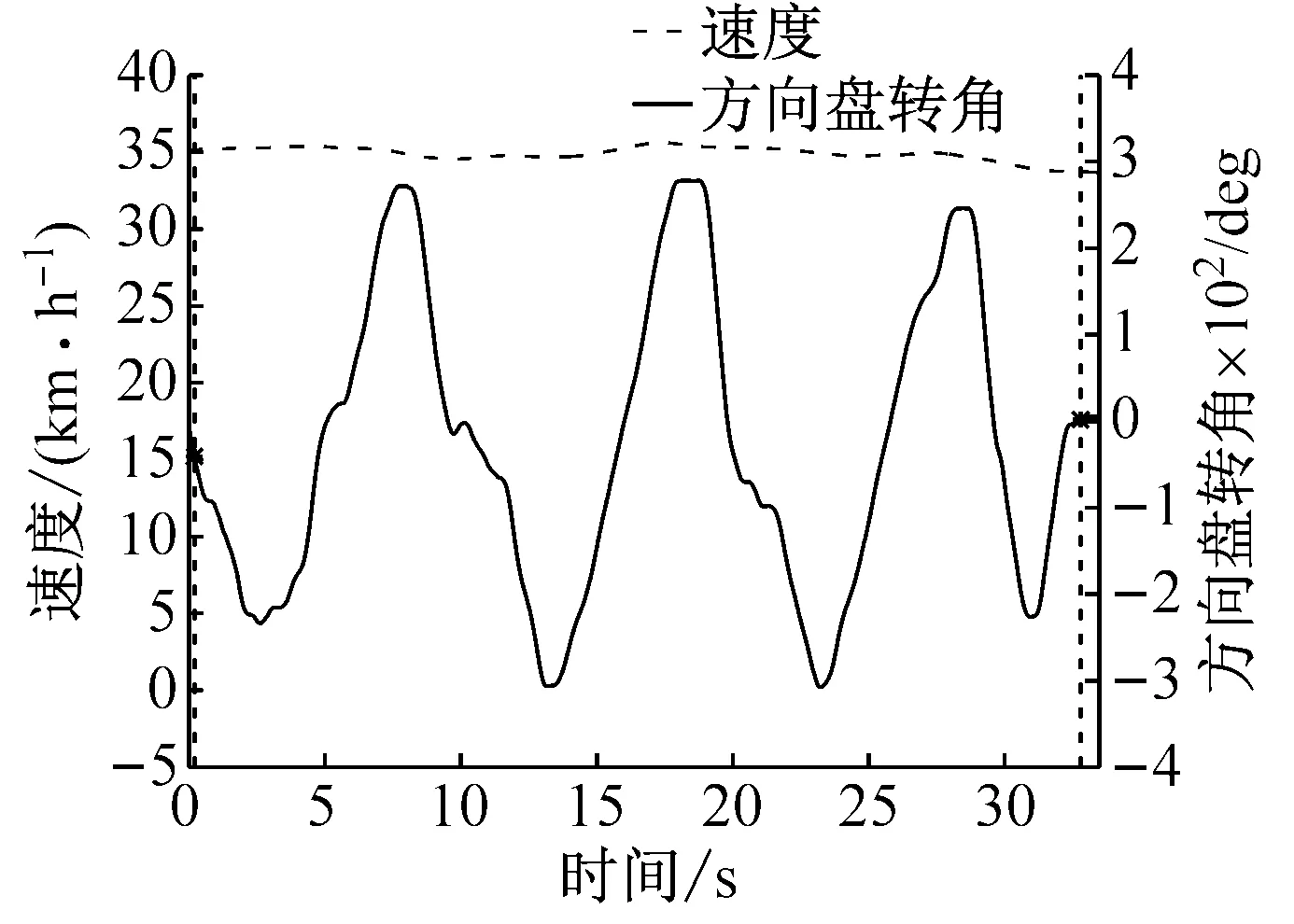
阶跃实验中,以21 km/h速度级的实验进行说明,将实车实验结果和数学模型仿真结果进行对比,如图4所示。图4(a)为该工况下的车辆速度和方向盘转角输入,图4(b)、图4(c)分别为实验和仿真中车辆侧向加速度、车辆侧倾角度的结果对比。

(a) 速度和方向盘转角输入
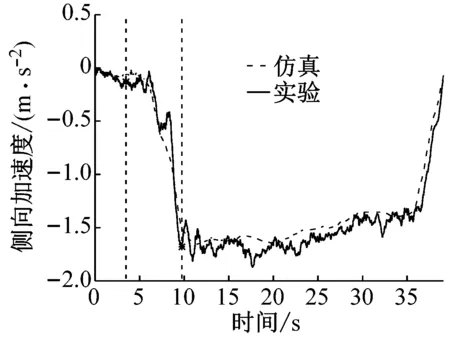
(b) 侧向加速度结果对比

(c) 侧倾角度结果对比
图4中,在两个标记点之间的时间段内,车辆完成了阶跃转向。图4(a)中,在3.5~9.7 s的时间段内,车辆的阶跃速率为99 deg/s,速度在23 km/h左右;阶跃转向完成之后,车辆方向盘转角保持在630 deg左右,速度稳定在20 km/h左右。
图4(b)中,数学模型仿真得到的侧向加速度与实车实验得到的侧向加速度吻合程度较高。阶跃转向阶段,实车的车辆侧向加速度从-0.13 m/s2变化到-1.68 m/s2,模型中车辆的侧向加速度从-0.07 m/s2变化到-1.5 m/s2;阶跃转向完成之后,实车的侧向加速度保持在-1.59 m/s2左右,模型中车辆的侧向加速度保持在-1.53 m/s2左右,二者相差4%,模型仿真结果和实车实验结果比较吻合。
3.2.2 蛇形实验
蛇形实验中,以35 km/h速度级的实验进行说明,将实车实验结果和数学模型仿真结果进行对比,如图5所示。图5(a)为蛇形工况中车辆速度和方向盘转角输入,图5(b)、图5(c)分别为实验和仿真中车辆侧向加速度、车辆侧倾角度的结果对比。
(a) 速度和方向盘转角输入
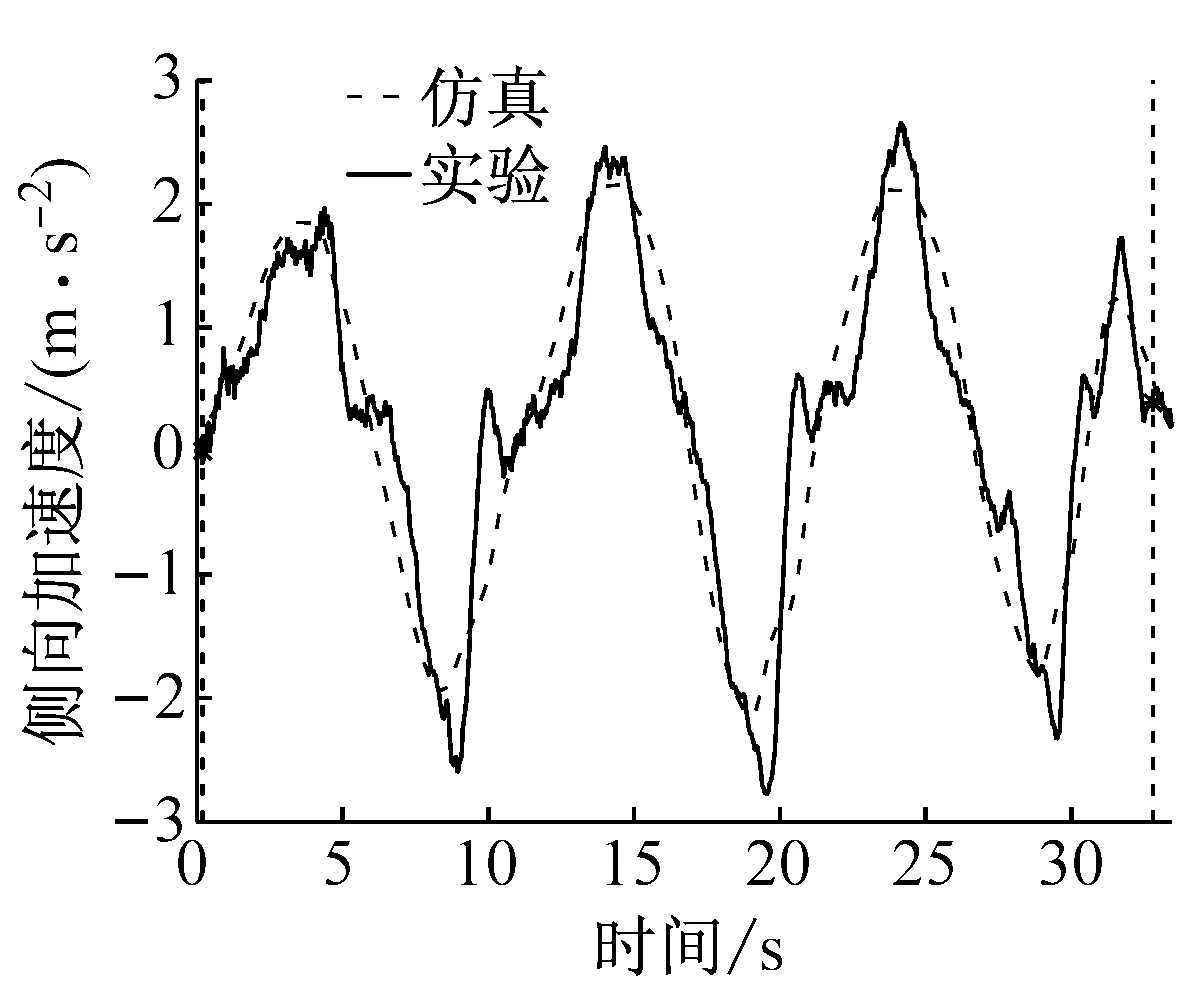
(b) 侧向加速度结果对比
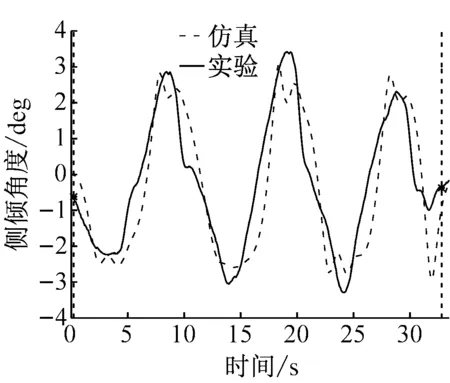
(c) 侧倾角度结果对比
蛇形工况中,车辆的速度稳定在35 km/h左右,方向盘转角的峰峰值为-307~278 deg。图5(b)中,模型仿真结果与实验结果波形吻合较好,但局部峰值存在差异,在第三个波峰处,实车的侧向加速度为2.6 m/s2,模型仿真得到的车辆侧向加速度为2.1 m/s2。图5 (c)中,模型仿真结果与实验结果在整个周期比较吻合,但局部峰值存在较大差异,最后一个波谷处,实车的侧倾角度为-0.99 deg,而模型仿真得到的车辆侧倾角度为-2.94 deg。
4 模型中非线性参数的影响
上文对多轴载重车非线性三自由度数学模型进行了研究,虽然模型仿真结果与实验结果较为吻合,但是模型仿真速度较慢。考虑到线性模型具有更快的仿真速度,能够提高车辆预警的实时性,因此将非线性数学模型中的主要非线性参数轮胎侧偏刚度和油气弹簧刚度进行分段线性化处理,并研究其对仿真结果的影响。
4.1 轮胎侧偏刚度的分段线性化
由于轮胎尺寸和载重近似,车辆的三自由度数学模型中,轮胎侧偏刚度使用Trucksim中的轮胎模型数据。轮胎模型为“3 500 kg Rating,600 mm Radius”轮胎模型,其轮胎侧向力与轮胎垂向载荷、轮胎侧偏角的关系如图6(a)所示。
根据车辆侧翻模型的假设,用载重车总重量与轮胎总数量的比值作为轮胎的额定载荷,然后对图6(a)中的轮胎原始数据进行‘spline’插值方法插值,得到额定载荷下的轮胎侧偏曲线,如图6(b)所示。
在对轮胎进行分段线性化时,用固定的轮胎侧偏刚度代替轮胎非线性侧偏曲线。根据模型仿真中轮胎侧偏角的变化范围选取五个侧偏刚度进行研究,五种轮胎侧偏刚度如表2所示。
非线性数学模型仿真过程中,轮胎的侧偏刚度根据轮胎实时的侧偏角度查表得到;轮胎侧偏刚度分段线性化后的数学模型中,轮胎的侧偏刚度为固定数值。阶跃实验中,将表2中的五种轮胎侧刚度分别带入车辆的三自由度数学模型进行仿真,结果如图7所示。

(a) ‘3 500 kg Rating,600 mm Radius’轮胎模型

(b) 轮胎的侧向力和侧偏刚度

侧偏角/rad侧偏刚度/(N·rad)0.014.673×1050.054.322×1050.103.532×1050.152.750×1050.202.116×105
(a) 轮胎侧偏刚度对侧倾角度的影响
(b) 轮胎侧偏刚度对侧向加速度的影响
图7中,模型的轮胎侧偏刚度对车辆的侧倾角度和侧向加速度响应影响不大。将仿真结果进行局部放大,可以得出,分段线性化之后,轮胎的侧偏刚度对模型的阻尼有一定影响:轮胎侧偏刚度越小,整车模型的阻尼相对越大。
4.2 油气弹簧刚度的分段线性化
多轴载重车常常采用油气弹簧作为车辆的缓冲装置。油气弹簧一般用压缩气体来储存能量,因此油气弹簧的刚度具有非线性的特点。油气弹簧受拉时,其刚度较小,受压时,其刚度迅速增大。单个油气弹簧的刚度曲线如图8中的虚线所示。忽略车辆各个油气弹簧的差异,并且假设车辆一侧油气弹簧的压缩量等于另一侧弹簧的拉伸量,则合成整车的侧倾刚度如图8中实线所示。
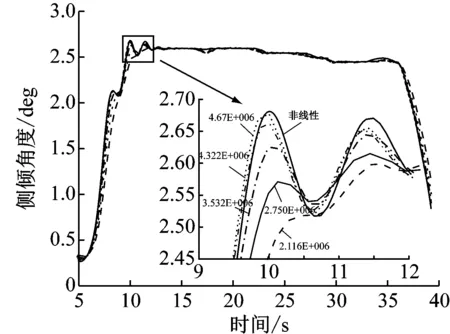
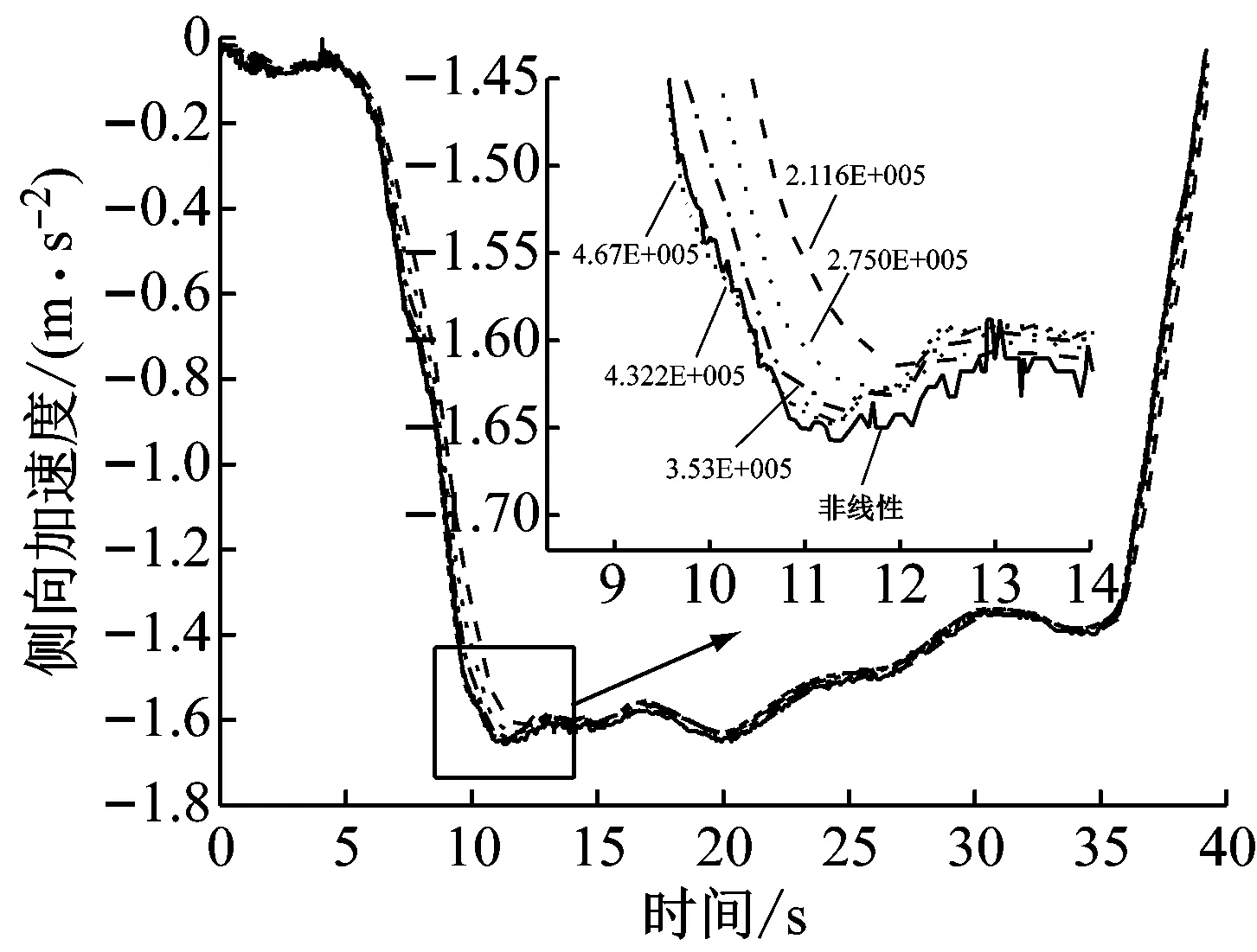
对油气弹簧刚度进行分段线性化时,用固定刚度值代替油气弹簧实际的非线性刚度。根据实车实验中油气弹簧的位移变化范围,采用图8中标记点处的五个侧倾刚度进行分别仿真。五种侧倾刚度如表3所示。
非线性数学模型仿真过程中,车辆的侧倾刚度根据车辆实时的侧倾角度查表得到;油气弹簧刚度分段线性化后的数学模型中,整车侧倾刚度为固定数值。表3中的五种固定侧倾刚度的数学模型仿真结果如图9所示。

图8 油气弹簧刚度曲线
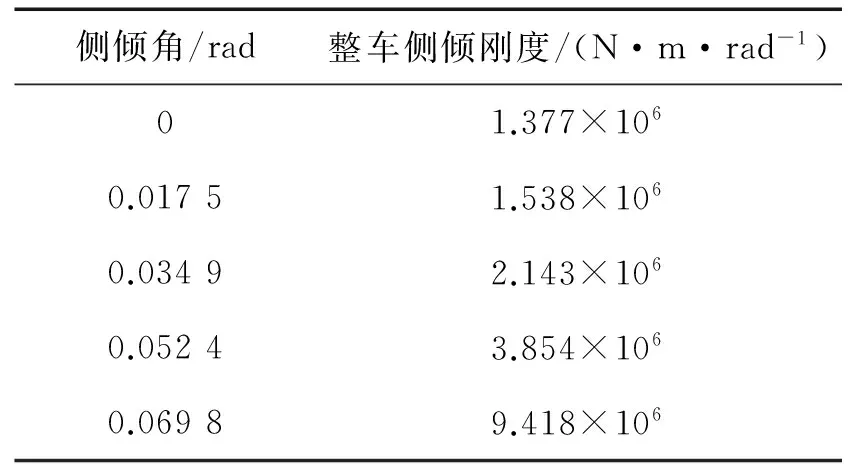
侧倾角/rad整车侧倾刚度/(N·m·rad-1)01.377×1060.01751.538×1060.03492.143×1060.05243.854×1060.06989.418×106
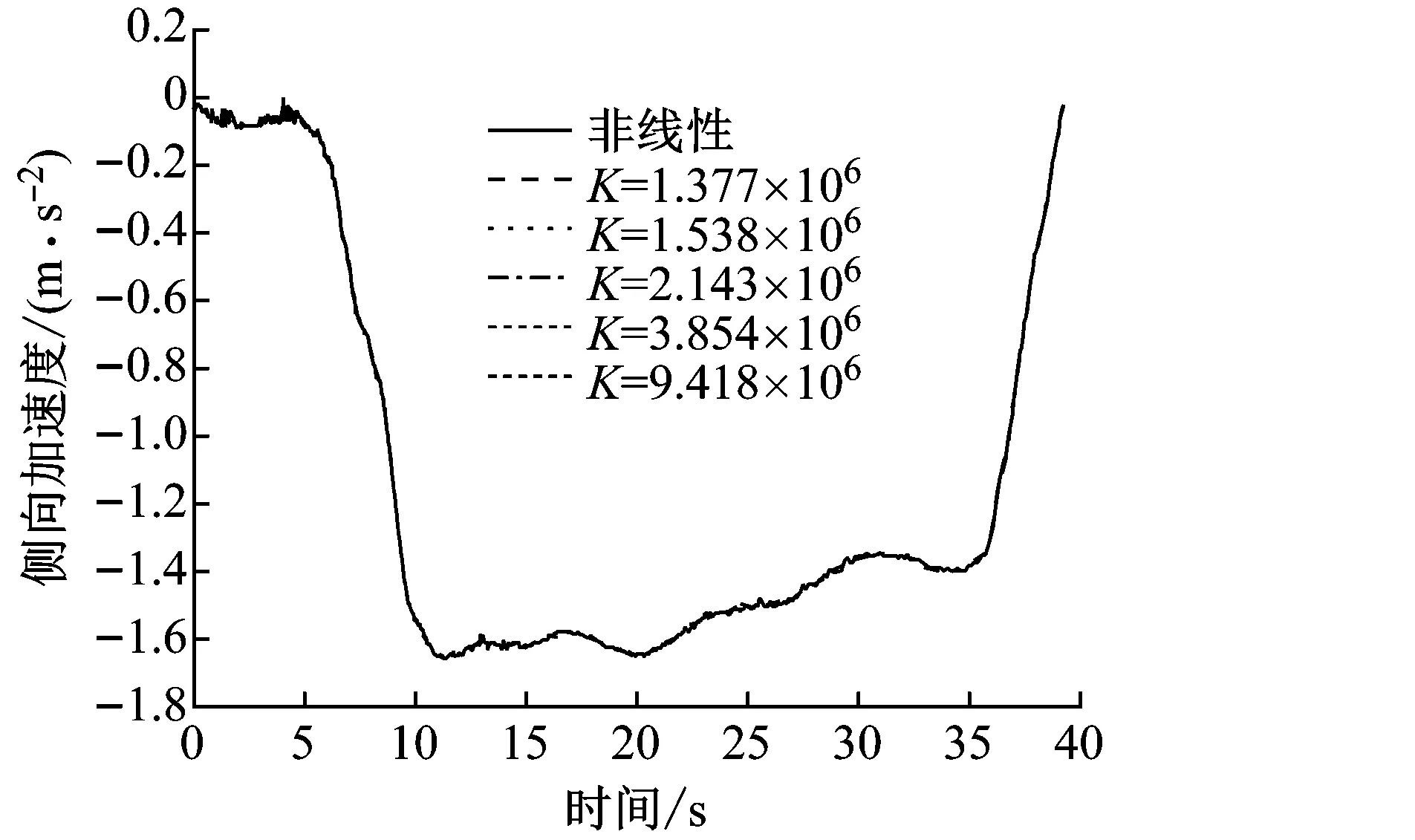
(a) 油气弹簧刚度对侧向加速度的影响
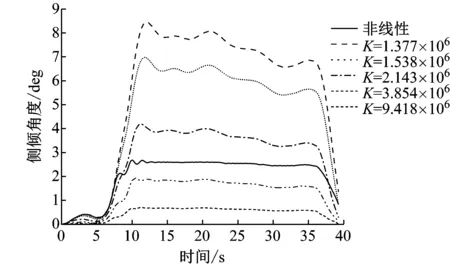
(b) 油气弹簧刚度对侧倾角度的影响
图9(a)中,整车的侧倾刚度几乎不影响车辆的侧向加速度响应,根据车辆的三自由度数学模型,车辆的侧向加速度响应主要与车辆的方向盘转角输入和车辆的速度输入有关;图9(b)中,整车的侧倾刚度对车辆的侧倾角度影响较大:整车侧倾刚度越小,车辆的侧倾角度越大。
5 结 论
本文建立了多轴载重车的三自由度侧翻模型,并通过实车实验对其进行验证。结果表明,考虑了轮胎的非线性特性和油气弹簧的非线性特性后,车辆数学模型的仿真结果与实车实验结果吻合较好;结果也表明,与车辆侧倾角度相比,数学模型仿真结果中车辆的侧向加速度与实验结果中车辆的侧向加速度吻合更好。
以非线性模型为基础,本文研究了轮胎侧偏刚度分段线性化和油气弹簧刚度分段线性化对模型仿真结果的影响。结果表明,一定范围内,轮胎的侧偏刚度对车辆的侧倾角度和侧向加速度响应影响较小,同时,轮胎的侧偏刚度越小,模型的阻尼越大;结果也表明,油气弹簧的刚度对车辆的侧倾角度响应影响较大,油气弹簧的刚度越大,车辆的侧倾角度越小,同时油气弹簧的刚度对车辆的侧向加速度响应几乎无影响。
参 考 文 献
[1] National highway traffic safety administration. Traffic safety facts 2000: a compilation of motor vehicle crash data from the fatality analysis reporting system and the general estimates system[R]. Washington, DC: US Department of Transportation, 2001.
[2] KIM H J, PARK Y P. Investigation of robust roll motion control considering varying speed and actuator dy-namics[J]. Mechatronics, 2004, 14(1): 35-54.
[3] ZHU B, PIAO Q, ZHAO J, et al. Integrated chassis control for vehicle rollover prevention with neural network time-to-rollover warning metrics[J]. Advances in Mechanical Engineering, 2016, 8(2): 1-3.
[4] YU Z, LI J, DAI F, et al. Anti-rollover control based on fuzzy differential braking for heavy duty commercial vehicle[C]//Proceedings of the 2016 4th International Conference on Machinery, Materials and Computing Technology. Paris: Atlantis Press, 2016.
[5] 赵健, 郭俐彤, 朱冰, 等. 基于神经网络和侧翻时间算法的轻型汽车侧翻预警[J]. 吉林大学学报(工学版), 2012, 42(5):1083-1088.
ZHAO Jian, GUO Litong, ZHU Bing, et al. Rollover warning for light vehicles based on NN-TTR algorithm[J]. Journal of Jilin University(Engineering and Technology),2012,42(5):1083-1088.
[6] 岑达希. 基于主动转向与差动制动的汽车防侧翻控制研究[D]. 杭州: 浙江大学, 2011.
[7] 朱天军. 基于改进TTR重型车辆侧翻预警及多目标稳定性控制算法研究[D]. 吉林:吉林大学, 2010.
[8] 金智林. 运动型多功能汽车侧翻稳定性及防侧翻控制[D]. 南京: 南京航空航天大学, 2008.
[9] 王健,余贵珍,张为,等. 基于滑模观测和模糊推理的车辆侧翻实时预警技术[J]. 农业机械学报,2010,41(6):1-6.
WANGJian, YU Guizhen, ZHANG Wei, et al. Real-time rollover prediction for vehicle based on principles of sliding mode and fuzzy inference system[J]. Transactions of the Chinese Society for Agricultural Machinery,2010,41(6):1-6.
[10] TAKANO S, NAGAI M, TANIGUCHI T, et al. Study on a vehicle dynamics model for improving roll stability[J]. JSAE Review, 2003, 24(2): 149-156.
[11] KIM H J. Robust roll motion control of a vehicle using integrated control strategy[J]. Control Engineering Practice, 2011, 19(8): 820-827.
猜你喜欢
军民两用技术与产品(2022年2期)2022-06-01
体育科技文献通报(2022年3期)2022-05-23
新高考·高二数学(2022年3期)2022-04-29
模具制造(2022年1期)2022-02-23
北京航空航天大学学报(2021年4期)2021-11-24
中学生数理化(高中版.高考理化)(2021年1期)2021-03-19
电子制作(2019年23期)2019-02-23
新高考·高一物理(2016年10期)2017-07-07
中学数学杂志(初中版)(2016年5期)2016-11-01
汽车文摘(2015年11期)2015-12-02