一种改进的Stewart平台Newton-Euler动力学模型
2018-05-23 10:24何兆麒薛冬新宋希庚
振动与冲击 2018年9期
何兆麒, 薛冬新, 张 娟, 宋希庚
(1. 大连理工大学 能源与动力学院, 辽宁 大连 116024; 2. 大连装备职业技术学院 航海工程系, 辽宁 大连 116024)
自1965年,Stewart[1]发表了最早的将并联机构用作飞行模拟器的文章以来,由于结构刚度大、承载能力强、误差小、精度高、动力性能好等一系列优点,并联机构在空间对接、并联机床、隔振、高精密平台等方面得到广泛应用[2-12]。但因并联平台是闭环多刚体结构,使得运动学正解、动力学分析更加复杂。目前,用于Stewart平台的动力学建模方法主要有牛顿-欧拉法、Lagrange法、虚功原理以及Kane法等。其中Newton-Euler法是由牛顿第二定律直接推导出来的,方法直观,应用广泛。Fichter在忽略运动支链的质量和铰链摩擦的情况下,给出了平台驱动与惯性力以及外力之间的关系。Do等[3]基于Newton-Euler法建立了忽略关节摩擦和支腿轴向转动惯量时Stewart并联机构的逆动力学模型。Dasgupta等在充分考虑Stewart动平台惯性、支腿惯性和关节摩擦的基础上,提出了较为完善的Newton-Euler闭环动力模型(下文以经典模型指代),在此后的研究中得到广泛的应用。但逐渐有学者指出,该经典模型存在几点不足,① 忽略了支腿绕其自身轴线的回转运动;② 假设万向铰处的约束力矩沿着支杆方向;③ 计算各结构的转动惯量时没有正确考虑平行轴定理。虽然以上这些假设简化了模型,提高了计算效率,但这些假设不符合实际,会降低模型的准确性。李长春等[13]提出一种考虑支腿转动的逆动力学模型,通过算例比较了忽略支腿绕自身转轴转动对运动学逆解的影响。Fu等[14-15]从不同的方面给出了修改建议,郭洪波[16]从能量的角度分析了忽略支腿绕自身轴线的回转运动对动力学模型的影响。Pedrammehr等[17]综合上述三方面,建立了改进的牛顿-欧拉动力学模型,逆动力学计算结果表明改进模型与Dasgupta的经典模型有明显的不同。
由理论力学的相关知识可知,利用转动惯量表示刚体的动量矩时,矩心是否为刚体固连点,将影响动量矩定理的具体表述形式。建立Stewart平台的动力学模型时,通常将单个支腿简化为上、下支杆,分别关于下铰点取矩。下支杆受力关于下铰点的力矩平衡可认为是对刚体固连点取矩,而上支杆受力对下铰点的力矩平衡是对刚体外一点取矩,两者应做不同处理。但以往的研究忽略了这一点,因此,笔者认为经典模型除了以上三点不足外,还存在以下问题,即:在建立支腿和动平台的欧拉方程时,没有合理区分力矩简化中心是否固连于刚体。基于这一考虑,笔者在文献[18]仅针对上支杆欧拉方程的建立,给出了修改建议。本文首先阐述改进工作的理论依据,其次针对6-UPS型Stewart平台,在前人研究成果的基础上,区分矩心是否为刚体固连点,在第2、3节分别建立利用非质心转动惯量和质心转动惯量表示的两种改进闭环动力学模型。最后通过求解文献[4]的算例,比较本文改进模型和经典模型动态响应的不同,说明改进的必要性。
1 理论依据
如图1所示,以O0为原点建立惯性坐标系O0x0y0z0,C是刚体质心,B点相对于惯性系作任意运动,关于动点的动量矩定理可表示为
(1)

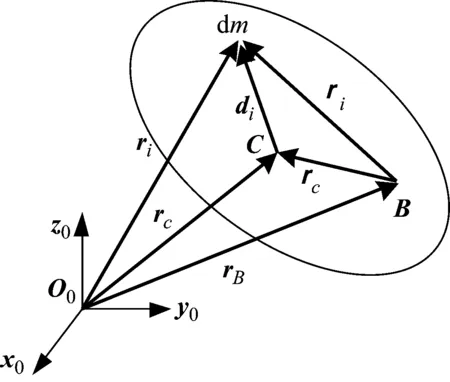
图1 刚体上质量微元dm的矢量表示

(2)

将式(2)代入式(1)得
(3)
当点B静止时,式(3)变为
(4)

(5)
当B点固定时,式(5)仍然成立。
下文中为叙述方便,将式(3)称为依据一,式(5)称为依据二。
2 6-UPS型Stewart平台动力学分析
本文所研究的Stewart平台结构及第i支杆矢量表示如图2所示。下平台固定,连杆与上、下平台分别采用球铰、万向铰连接,支杆为直线运动副,机构具有六个运动自由度。上、下平台六个铰链点中心分别为Pi、Bi(i=1,…,6)。为便于运动学和动力学分析,在上、下平台的几何中心点P、B处建立连体坐标系{PX1Y1Z1}、参考坐标系{BXYZ}。

图2 Stewart平台及第i支杆矢量图
以下符号被用于平台建模中:tp为上平台参考点P在{B}中的位置矢量;ωp,αp为上平台角速度、角加速度;Rp为RPY角描述的上平台的旋转变换矩阵;pi为上平台各球铰铰心Pi在{P}中的位置矢量;bi为下平台各万向铰铰心Bi在{B}中的位置矢量;Si为铰心Bi到对应Pi在{B}中的位置矢量;ei为第i根支杆单位矢量;ωli,αli为第i根支杆的角速度、角加速度;Iu0i,Id0i为上下支杆在各自质心坐标系(坐标原点在上下支杆质心处,方向与{D}相同)的惯量矩阵;Ip0:上平台和质量负载在质心坐标系(原点在上平台综合质心,方向与{P}相同)的惯量矩阵。
2.1 第i个支杆运动学分析
在Pi、Bi处建立上、下支杆局部坐标系{U}、{D},坐标系{D}的x轴沿支杆方向,y轴沿万向铰轴线方向,z轴由右手定则确定,{U}各轴与{D}相应的轴线平行。此外,在Bi处还有支腿固定坐标系{BiXBiYBiZBi},方向与{B}平行。
(1) 上平台铰接点速度、加速度分析
由图2可知,第i支杆的位置矢量
Si=tp+Rppi-bi=tp+qi-bi
(6)
则支杆长度和沿支杆单位矢量可以表示为
(7)
ei=Si/Li
(8)
对式(6)两端微分,得点Pi的速度、加速度为
(9)
(10)

(11)
(12)
(2) 支杆滑动速度、加速度分析
由式(11)、式(12),结合式(10)整理得支杆伸缩速度、伸缩加速度分别为
(13)
(14)

(3) 支杆角速度ωli、角加速度αli分析
如图3所示,单位向量ki、yi、hi代表第i个万向铰模型,ki沿着万向铰的固定轴,yi沿着万向铰的旋转轴,hi垂直于ki、yi组成的平面。由结构特点知,yi与ki共面且相互垂直,与支杆单位向量ei也相互垂直,xi、yi、zi代表上文的坐标系{D}。因此,从{D}~{BiXBiYBiZBi}的旋转变换矩阵为
Ti=[xi,yi,zi]
(15)

由运动学约束知,ωli位于ki、yi组成的平面内
ωli=ωkiki+ωyiyi
(16)
式中:ωki、ωyi分别为支杆角速度沿着ki、yi的分量。

图3 万向铰结构简图
文献[4-5]假设支杆角速度ωli⊥ei,即要求支杆垂直于ki、yi组成的平面。由结构特点知,这就要求必须忽略支杆绕自身轴线的旋转自由度,显然这不符合实际,因此假设ωli⊥ei是不合理的。
将式(16)代入式(11),整理得
(17)
(18)
对式(16)两端求导,支杆角加速度αli表示为

αli=αkiki+αyiyi+ωyiωkihi
(19)
此外,ωli还可以分解为垂直于支杆的分量ω和沿着支杆方向的分量ωeiei,即
ωli=ω+ωeiei
(20)
将式(20)代入式(11),可得到
(21)
因ωli位于ki、yi组成的平面内,而hi垂直于该平面,所以ωli·hi=0。利用这一性质,由式(20)得
ωei=-(ω·hi)/(ei·hi)
(22)
同样,αli可以分解为垂直于支杆的分量α和沿着支杆方向的分量αeiei,即
αli=α+αeiei
(23)
将式(23)代入式(12),整理得
α=(ei×api)/Li+U2i
(24)

由式(23)和式(19)整理得
αki=(α+αeiei)·ki
(25)
αei=[(α·ki)ki·ei+ωyiωkihi·ei]/1-
(26)
至此,将式(24)、式(26)代入式(23)得到支杆角加速度的完整表达

u2iei
(27)

(4) 上、下支杆质心速度、加速度分析
上、下支杆质心(图2中的Gu、Gd)在{BiXBiYBiZBi}的位置矢量rui、rdi可表示为
rui=Ti(vi+ru0i)
(28)
rdi=Tird0i
(29)

因此,上、下支杆质心的加速度可分别表示为
(30)
(31)
2.2 第i个支杆动力学分析
应用平行轴定理,上下支杆对点Bi的惯量矩阵为

图4是单个运动支链的受力简图,Fsi是球铰处约束力,Cu和Cs是万向铰和球铰处的黏性阻尼系数。Fui、Mui分别为万向铰处的约束力矢量和约束力矩幅值。因为万向铰在yi、ki两个方向上有旋转自由度,约束力矩只能沿着hi方向,因此约束力矩为Muihi,而不是经典模型中的Muiei。

图4 第i个支杆受力分析示意图
根据第1节中依据一,结合受力分析,建立整个支杆关于Bi点的欧拉方程
-rui×muaDi+(mdrdi+murui)×g-(Idi+Iui)αli-
ωli×(Idi+Iui)ωli+Muihi+Si×Fsi-Cuωli-
fi=0
(32)
式中:fi=Cs(ωli-ωp)为球绞摩擦力矩;aDi为该瞬时,上支杆上与Bi点相重合的点的绝对加速度。
由运动学分析知
(33)
将式(14)代入式(33)整理得
aDi=(ei·api)ei+U3i
(34)

将式(32)改写为
Muihi+Si×Fsi=Ni
(35)
其中,
Ni=rui×muaDi-(mdrdi+murui)×g+
(Idi+Iui)αli+ωli×(Idi+Iui)ωli+Cuωli+fi
(36)
式(35)两端点乘、叉乘ei,得到Mui及Fsi为
Mui=(Ni·ei)/(hi·ei)
(37)
Fsi=ei(ei·Fsi)+(Ni×ei-Muihi×ei)/Li
(38)
为了得到(ei·Fsi),考虑上支杆沿支杆方向的受力平衡
(39)
式中:Facti、Cp分别为滑移铰处支杆主动力、黏性摩擦因数。
将式(37)、式(39)代入式(38)整理得

(40)
将式(36)代入式(40),利用式(30)、式(14)、式(23)、式(33),并结合矢量计算规则化简Fsi的表达式
(41)
其中

U4i=u1iei+U2i×rui+ωli×(ωli×rui);
U5i=mu(rui×U3i)+(Idi+Iui)(U2i+u2iei)-
(mdrdi+murui)×g+ωli×(Idi+Iui)ωli+Cuωli+fi;
为了推导式(41),需要用到以下矢量代数运算规则

(a·b)c=(aTb)c=c(aTb)

2.3 上平台运动学、动力学分析
上平台和质量负载的综合质心在{B}中的位置矢量表示为
qc=tp+RpR0=tp+R
(42)
式中:R0为上平台和质量负载的综合质心在{P}中的位置矢量。
对式(42)进行微分,得到综合质心的加速度
(43)
由平行轴定理,上平台和质量负载对点P的转动惯量为
(44)
式中:mp为上平台和质量负载的质量之和。
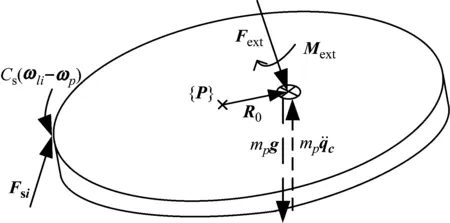
图5 上平台受力分析简图
上平台的牛顿方程、相对点P的欧拉方程分别为
(45)
(46)
式中:Fext,Mext分别为外界作用于上平台的作用力和作用力矩在局部坐标系{P}中的表示。
将式(43)、式(41)代入式(45)、式(46)进行整理
(47)
(48)
合并式(47)、式(48),得到上平台的完整动力学方程
(49)
其中,

H=
3 质心转动惯量表示的6-UPS Stewart平台闭环动力学方程
文献[4-5]建立的欧拉方程,包含了质心加速度项,如果从这一角度推导方程,则方程中转动惯量项的计算需要做出调整。为了评估此误差,本节以第1节的依据二为基础,利用质心转动惯量建立动力学模型。这种表述形式下,对支杆和上平台的运动学分析同2.1、2.3,不同在于各结构动力学方程的建立。
第i个支杆关于Bi点的欧拉方程为
(Idci+Iuci)αli-ωli×(Idci+Iuci)ωli+
Muihi+Si×Fsi-Cuωli-fi=0
(50)

采用同式(32)类似的简化运算,得到
(51)
其中,


(Idci+Iuci)(U2i+u2iei)
u1i,U2i,u2i的表达式同第2节。

上平台和质量负载关于质心坐标系(原点在综合质心,方向与{B}相同)的转动惯量为
(52)
考虑上平台相对点P的力矩平衡
(53)
将式(43)、式(51)代入式(53)进行整理
mpR×[ωp×(ωp×R)-g]+ωp×Ipcωp+
(54)
合并式(47)、式(54),得到上平台的完整动力学方程
(55)
其中,

4 计算实例
为了比较改进模型与原模型的不同,笔者利用两种改进形式的Stewart平台完整动力学模型式(49)、式(55)求解文献[4]的计算实例,并与原文的结果进行比较。Stewart平台的结构参数、初始条件见附录2。
同经典模型一样,采用基于任务空间运动状态反馈的PD控制算法求解支杆主动力,PD算法描述如下

(56)
式中:Kp=[4.0×1054.0×1054.0×1065.0×1045.0×1041.0×105]T;Kd=[1.0×1041.0×1042.0×1041.0×1031.0×1032.0×103]T。
4.1 第一种改进模型式与经典模型比较
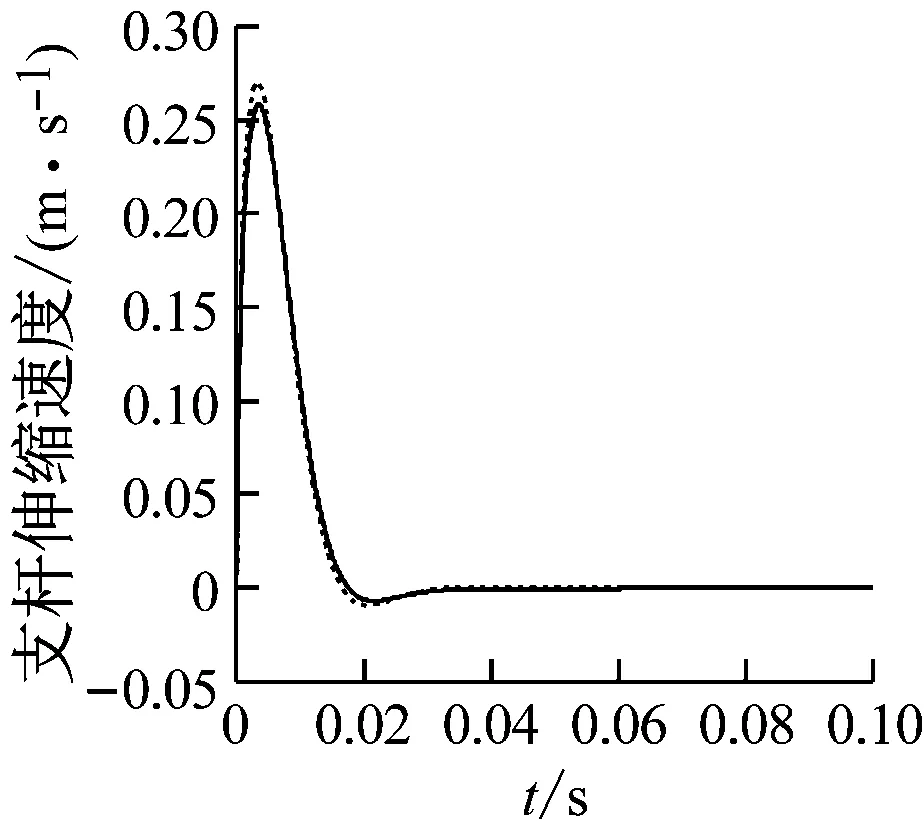
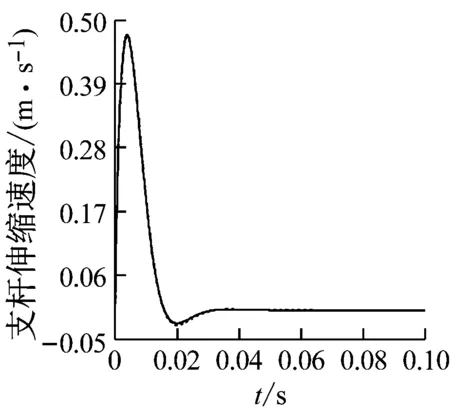
根据式(49)求解支杆长度、伸缩速度和上平台位移、速度的响应曲线,并与原模型计算结果一起显示在图6~图9中,所有图中实线、虚线分别为改进模型、原模型的响应结果。图6、图7的第一张小图右上角展示了Leg1长度和运动速度变化的局部放大曲线。可以观察到响应曲线的初始阶段及峰值处,两种模型下Leg1的长度和速度值略有不同,其余支杆也呈现类似的情况。
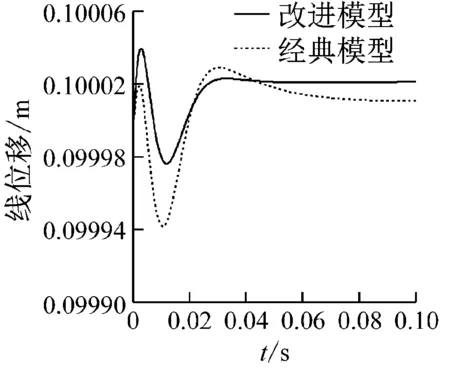
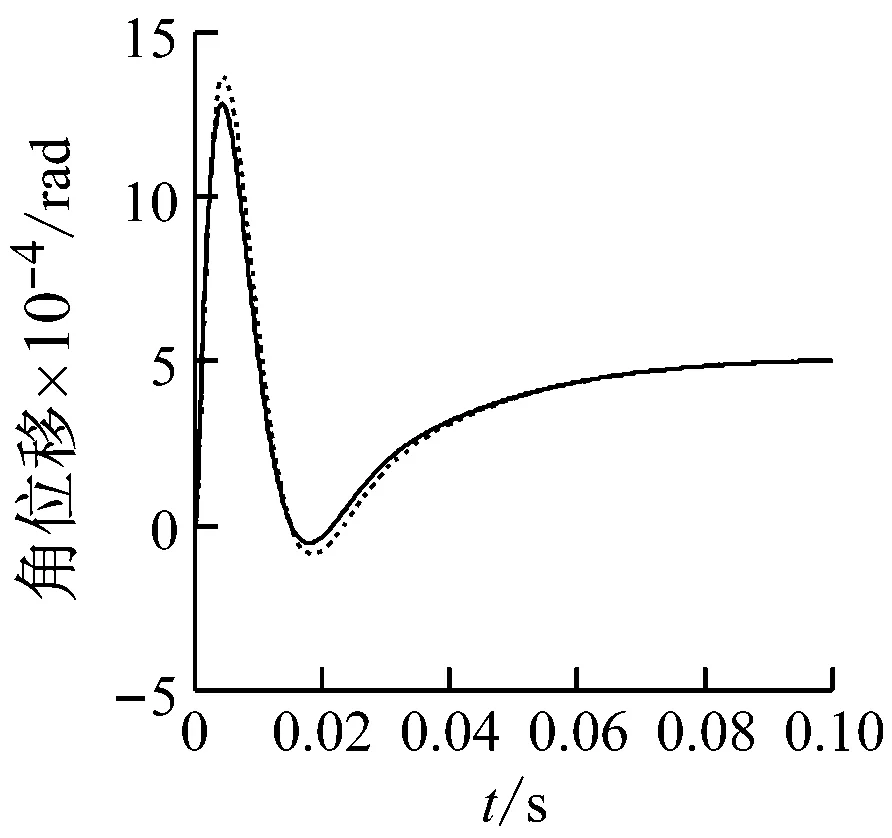
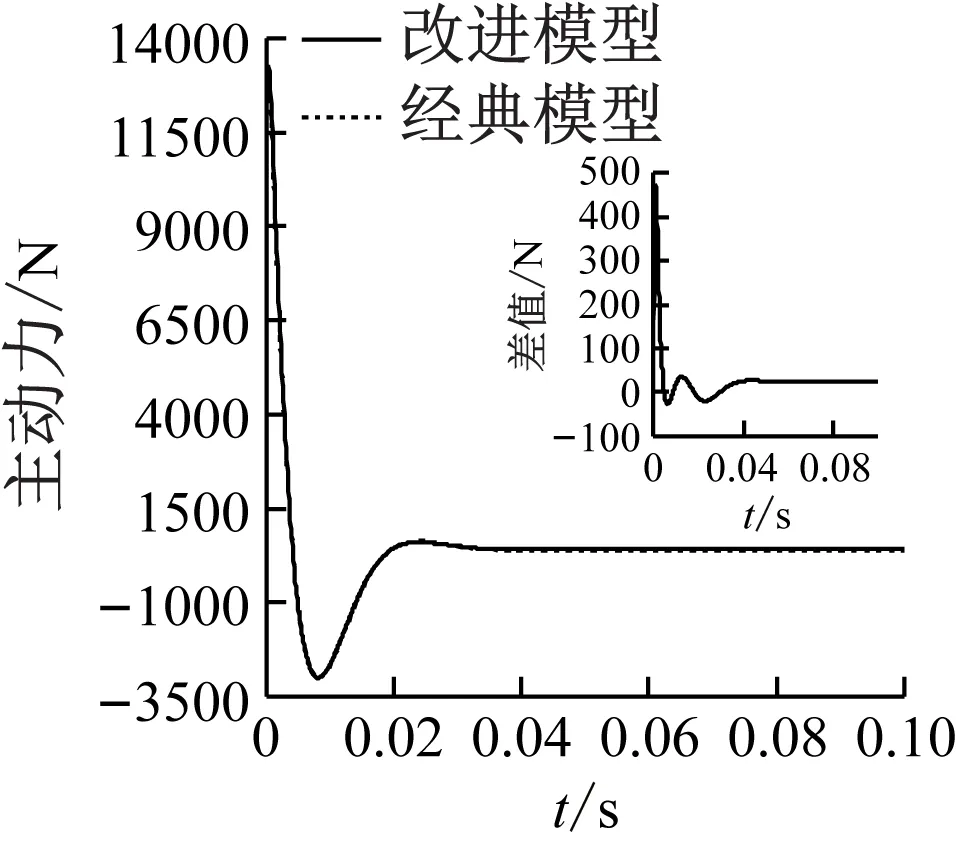
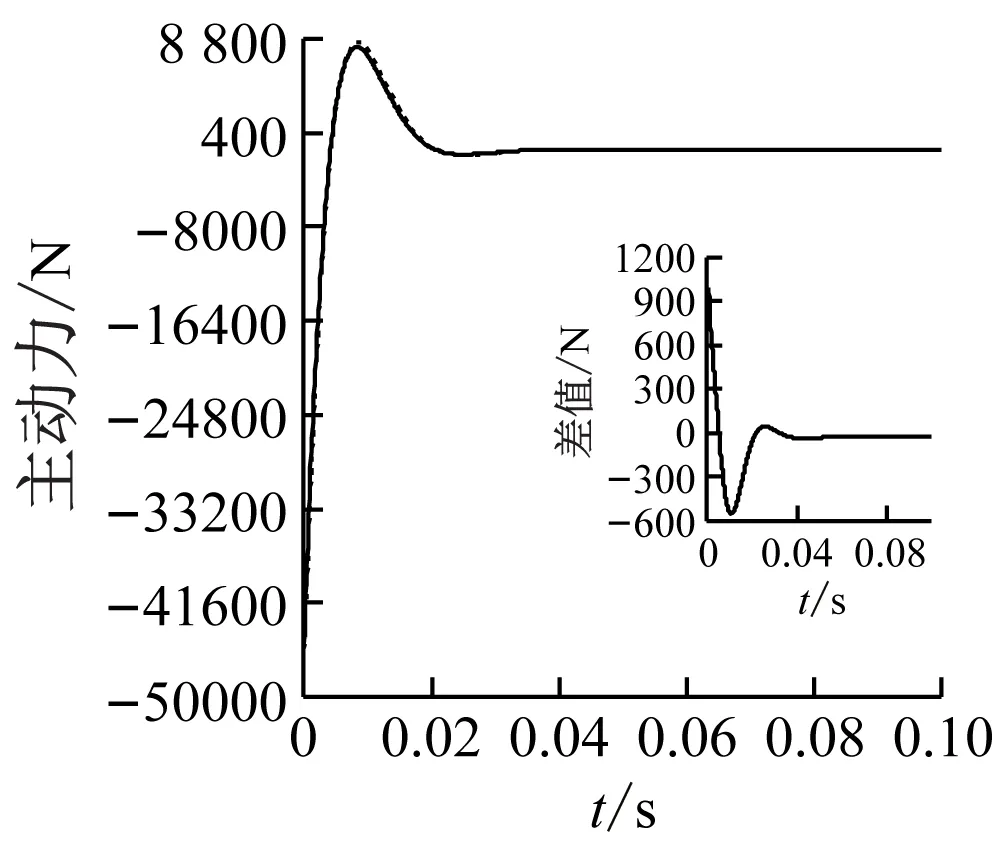
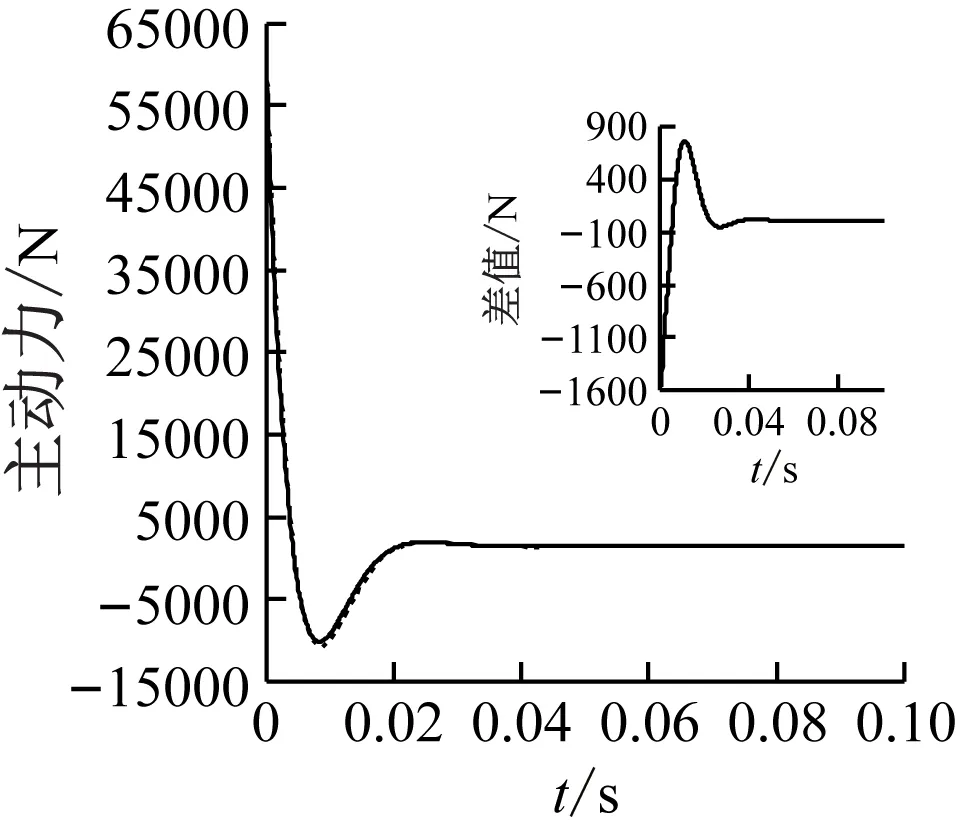
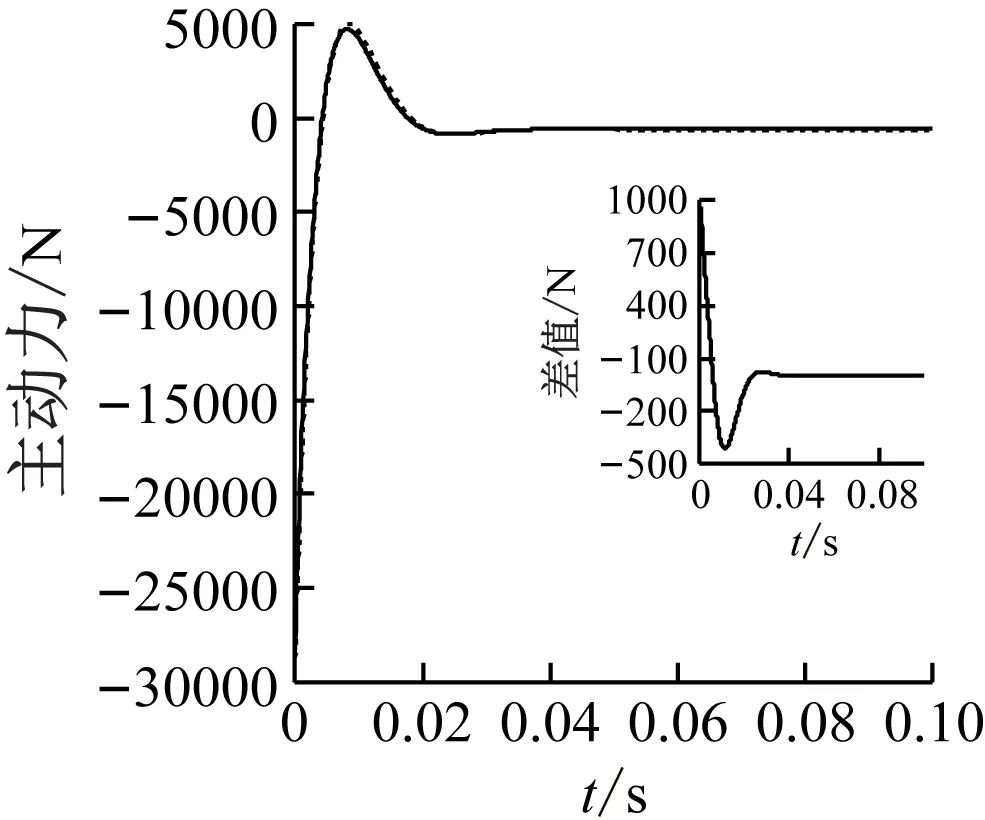
同样,由图8和图9可见,改进模型、原模型求解得到的上平台位移、速度、转角、角速度都具有相似的变化趋势,但幅值不同。由于初始状态和期望状态线位移tp、角位移θp的X、Y方向分量为0,因此两模型在这两个方向上的差值数量级很低。而速度响应在峰值处差值较为明显。图10描述了6根支杆所需的主动力,每个图中的小图描述了两种模型的差值,峰值处最大的误差值达到了45.94%。所以,从整体上来看,改进模型和原模型所有运动参数具有相似的变化趋势,但在峰值处,幅值呈现较为明显的不同。
4.2 第二种改进模型式与经典模型比较
经计算,由(55)得到的响应曲线与第一种改进形式(49)的结果完全一致,因此,第二种改进模型式(56)与经典模型的比较同图6~图10。由于篇幅有限,此处不再展示。实际上,第1节中的依据一、二本质上是一样的,它们是动量矩定理的两种不同表述。因此,以此为基础得到的两种改进形式本质上也是一致的。
5 结 论
本文在考虑支杆绕自身轴线的旋转自由度、修正万向铰约束力矩、合理应用平行轴定理计算各部分转动惯量、正确利用动量矩定理建立支杆及平台的欧拉方程的基础上,对原有基于Newton-Euler法建立的Stewart平台经典闭环动力学模型进行改进。得到质心转动惯量和非质心转动惯量表示的两种不同形式改进模型,这两种模型从本质上是一致的,计算结果很好的说明了这一点。
此外,从改进模型与原模型的计算结果比较来看,所有参数变化趋势相同,但所有时间点的响应呈现不同程度的误差,尤其是曲线峰值处。由于算例中设置的初始条件和期望状态的差值很小,而且整个Stewart平台结构尺寸、重量也较小,因此最终的比较结果并没有表现出特别显著的不同。从理论推导的角度来看,改进模型虽然只是对方程中某些项做了的修正,但提高了模型的准确性。对大型的平台结构这些修正带来的影响可能会更显著,因此改进工作是很有必要的,对后期的研究具有重要意义。

(a) Leg 1

(b) Leg 2

(c) Leg 3

(d) Leg 4
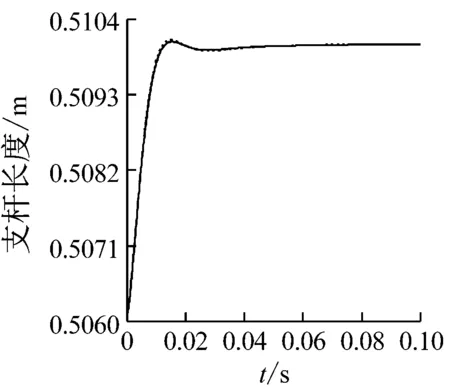
(e) Leg 5

(f) Leg 6
图6 支杆长度随时间变化曲线
Fig.6 Time response curve of pod length

(a) Leg 1

(b) Leg 2

(c) Leg 3
(d) Leg 4
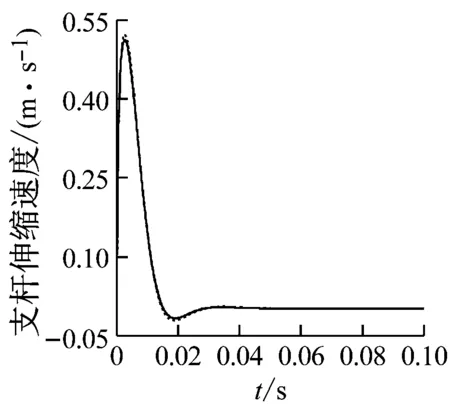
(e) Leg 5
(f) Leg 6
图7 支杆速度的时间响应曲线
Fig.7 Time response curve of pod velocity
(a)X



(a) Leg 1
(b) Leg 2
(c) Leg 3
(d) Leg 4

(e) Leg 5

(f) Leg 6
参 考 文 献
[1] STEWART D. A platform with six degrees of freedom[J]. Proceedings of the Institution of Mechanical Engineers, 1965, 180(1): 371-386.
[2] FICHTER E F. A stewart platform-based manipulator: general theory and practical construction[J]. The International Journal of Robotics Research, 1986, 5(2): 157-182.
[3] DO W Q D, YANG D C H. Inverse dynamic analysis and simulation of a platform type of robot[J]. Journal of Robotic Systems, 1988, 5(3): 209-227.
[4] DASGUPTA B, MRUTHYUNJAYA T S. Closed-form dynamic equations of the general Stewart platform through the Newton-Euler approach[J]. Mechanism and Machine Theory, 1998, 33(7): 993-1012.
[5] DASGUPTA B, MRUTHYUNJAYA T S. A Newton-Euler formulation for the inverse dynamics of the stewart platform manipulator[J]. Mechanism and Machine Theory, 1998, 33(8): 1135-1152.
[6] LEE K M, SHAH D K. Dynamic analysis of a three-degrees-of-freedom in-parallel actuated manipulator[J]. IEEE Journal on Robotics and Automation, 1988, 4(3): 361-367.
[7] YANG J, GENG Z J. Closed form forward kinematics solution to a class of hexapod robots[J]. IEEE Transactions on Robotics and Automation, 1998, 14(3): 503-508.
[8] WANG J, GOSSELIN C M. A new approach for the dynamic analysis of parallel manipulators[J]. Multibody System Dynamics, 1998, 2(3): 317-334.
[9] TSAI L W. Solving the inverse dynamics of a Stewart-Gough manipulator by the principle of virtual work[J]. Journal of Mechanical Design, 2000, 122(1): 3-9.
[10] LIU M J, LI C X, LI C N. Dynamics analysis of the Gough-Stewart platform manipulator[J]. IEEE Transactions on Robotics and Automation, 2000, 16(1): 94-98.
[11] 罗波,李伟鹏,黄海.基于Stewart平台的大柔性空间桁架结构振动控制[J]. 振动与冲击, 2012,31(23):148-153.
LUO Bo,LI Weipeng,HUANG Hai. Vibration control of a large flexible space truss using a Stewart platform manipulator[J]. Journal of Vibration and Shock, 2012,31(23):148-153.
[12] 李乔博,王超新,黄修长,等. 基于Stewart平台微振动主动控制分析与实验[J].噪声与振动控制, 2016,36(3):214-218.
LI Qiaobo, WANG Chaoxin, HUANG Xiuchang, et al. Analysis and experiment of micro-vibration active control based on a stewart platform[J]. Noise and Vibration Control, 2016,36(3):214-218.
[13] 李长春,延皓,张金英,等. 一种改进的6自由度运动模拟器逆动力学模型[J].兵工学报, 2009,30(4):446-450.
LI Changchun,YAN Hao,ZHANG Jinyin, et al. An improved inverse dynamics model of 6-DOF motion simulator[J]. Acta Armamentarii, 2009,30(4):446-450.
[14] FU S W, YAO Y. Comments on “A Newton-Euler formulation for the inverse dynamics of Stewart platform manipulator” by B. dasgupta and T.S. mruthyunjaya[mech. mach. theory 33 (1998) 1135-1152][J]. Mechanism and Machine Theory, 2007,42(12):1668-1671.
[15] VAKIL M, PENDAR H, ZOHOOR H. Comments to the:“Closed-form dynamic equations of the general Stewart platform through the Newton-Euler approach” and “A Newton-Euler formulation for the inverse dynamics of the Stewart platform manipulator”[J]. Mechanism and Machine Theory, 2008,43(10): 1349-1351.
[16] 郭洪波. 液压驱动六自由度平台的动力学建模与控制[D]. 哈尔滨: 哈尔滨工业大学, 2006.
[17] PEDRAMMEHR S, MAHBOUBKHAH M, KHANI N. Improved dynamic equations for the generally configured Stewart platform manipulator[J]. Journal of Mechanical Science and Technology, 2012, 26(3): 711-721.
[18] HE Z, SONG X, XUE D. Comments to the:“Closed-form dynamic equations of the general Stewart platform through the Newton-Euler approach” and “A Newton-Euler formulation for the inverse dynamics of the Stewart platform manipulator”[J]. Mechanism and Machine Theory, 2016, 102(10): 229-231.
[19] WITTENBURG J. Dynamics of multibody systems[M]. New York: Springer Science & Business Media, 2007.
附录
Stewart平台机构参数(均采用国际单位制)负载平台(包括质量负载)的质量:mp=40.0; 上、下支腿的质量:mu=1.0,md=3.0;负载平台(包括质量负载)的综合质心在{P}的位置矢量:R0=[0.04 0.03 -0.06]T;上、下支腿的重心位置:ru0i=[-0.6 -0.08 0.08]T、rd0i=[0.4 0.14 -0.18]T;万向铰、柱铰和球铰的黏滞阻尼系数:Cu=0.000 1,Cp=0.001,Cs=0.000 2。
虎克铰固定轴的单位矢量
k=

支杆上、下连接点的在各自局部坐标系的位置

上下支杆关于各自质心坐标系(坐标原点在上下支杆质心处,方向与{D}相同)的惯量矩阵

上平台和质量负载在质心坐标系(原点在综合质心,方向与{P}相同)的惯量矩阵
任务空间初始状态和期望状态
tp0=[0.1 0.0 0.395]T,θp0=[0.0 0.0 -0.2]T;
tpd=[0.1 0.0 0.4]T,θpd=[0.0 0.0 -0.2]T;
Fext=0,Mext=0。
猜你喜欢
中学数学研究(广东)(2022年17期)2022-10-09
吉林大学学报(理学版)(2022年5期)2022-09-24
哈尔滨商业大学学报(自然科学版)(2022年4期)2022-08-18
舰船科学技术(2021年10期)2021-12-10
科技与创新(2021年1期)2021-01-19
装备制造技术(2020年2期)2020-12-14
燃气涡轮试验与研究(2019年6期)2020-01-17
校园英语·中旬(2019年11期)2019-11-26
发明与创新(2016年22期)2016-10-13
发明与创新·中学生(2016年6期)2016-05-14