可控磁路式永磁悬浮系统的串级控制
2018-05-23 06:06夏鹏澎金俊杰徐方超金嘉琦
振动与冲击 2018年9期
孙 凤, 周 冉, 夏鹏澎, 金俊杰, 徐方超, 李 强, 金嘉琦
(沈阳工业大学 机械工程学院, 沈阳 110870)
可控磁路式永磁悬浮系统是伺服电机带动径向磁化的盘状永磁铁,通过改变永磁铁的旋转角度来改变磁路,进而调整系统悬浮力的大小,实现系统的悬浮[1]。该系统中悬浮力主要由外部支撑部件导磁体提供的,其与传统的永磁悬浮系统相比,它是通过改变磁路来控制悬浮力的大小[2],与其他磁悬浮装置相比,由于该系统的特点,导致在控制方面的难度系数有所增加。
在控制方法方面,PID(Proportional-Integral-Derivative)控制方法[3-5],具有结构简单、调节参数方便、参数易于整定、适用性强等特点,一定程度上可以使磁悬浮系统的控制精度达到要求,但抗外扰力较弱;鲁棒控制方法[6-7],作为一种可以解决系统模型存在不确定参数和抵制系统外部扰动的控制算法,但是结构比较复杂。设计完控制器后,运用Matlab进行仿真[8-10],通过仿真结果来验证控制器的性能。
随着高阶系统的出现,控制器的设计越来越复杂,然而单环控制方式已经不能满足对高阶系统的控制,为了有效抑制外部扰动和克服该系统自身的强耦合、非线性特性,以及让控制器设计更简单,结合传统PID的设计方法,本文设计了一种串级控制器。此控制器是由角度环和位置环组成的串级控制器,角度环采用PD(Proportional-Derivative)控制,位置环采用PID控制,并对其进行仿真和实验验证。该控制器通过系统的两个测量信号来控制一个执行机构,在一定程度上克服了系统自身特点和外部干扰的影响,使系统的鲁棒性得到增强,并且通过这种方式可以使本文的四阶系统降为两个二阶系统进行控制,解决了复杂的控制器设计问题,让控制器的设计更加简单。通过调整控制器各参数,在跟踪输入位移阶跃响应的Matlab仿真中表现出了快速跟踪信号的特点,还有较好的鲁棒稳定性。
1 悬浮系统的原理和数学模型
1.1 悬浮原理
如图1所示,当装置处于图1(a)状态时,盘状永磁铁的旋转角度θ=0°,磁感线不经过悬浮物,而是通过导磁体直接从N极回到S极,所以导磁体对悬浮物不产生磁力;当装置处于图1(b)状态时,永磁体的偏转角度θ>0°,这时部分从N极出发的磁感线就会通过右边的导磁体,经过悬浮物,再经过左侧导磁体,最终回到S极,这时导磁体就会对悬浮物产生吸引力,另一部分磁感线通过导磁体直接从N极回到S极,在θ从0°到达90°时,吸引力随着角度的增大而增大。
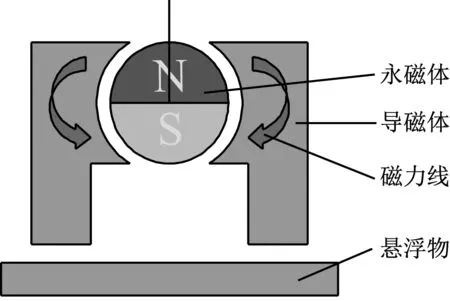
(a) 系统初始状态
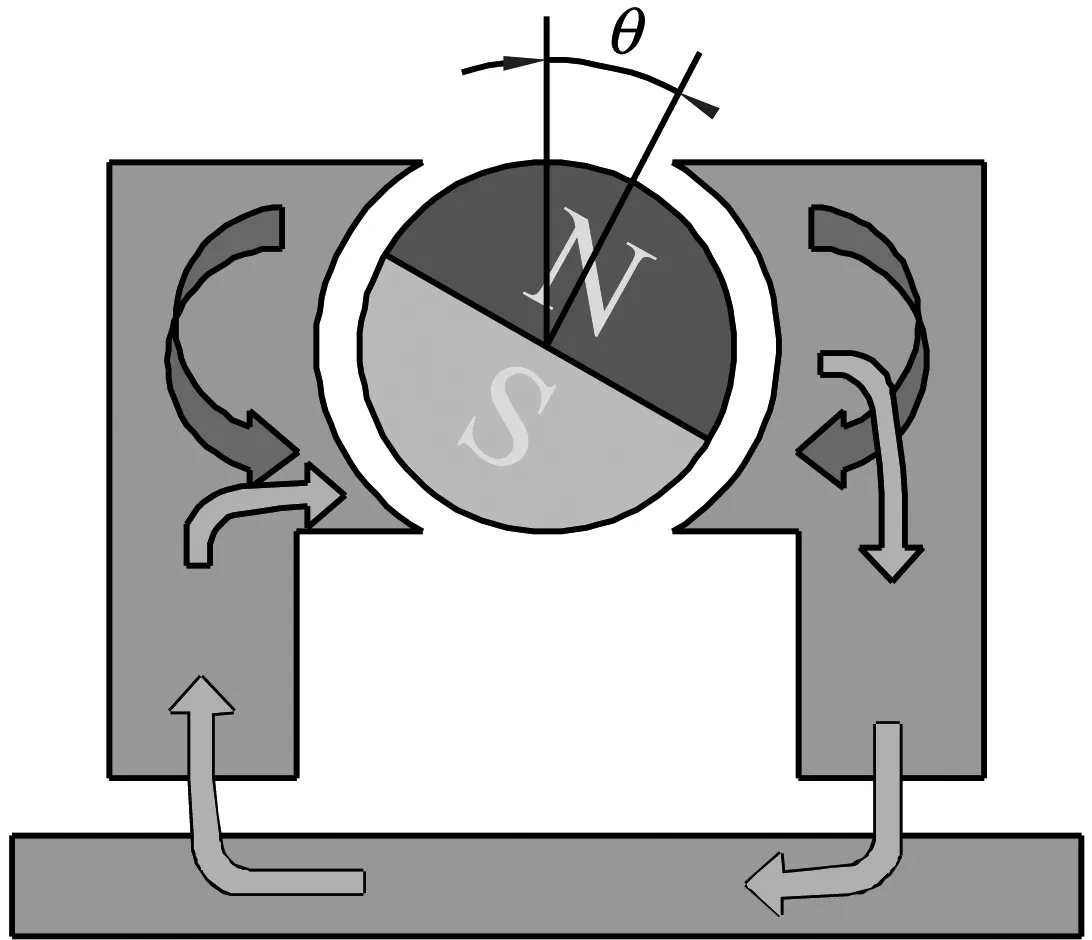
(b) 磁铁转角为θ°时
1.2 数学模型
如图2所示为可控磁路式永磁悬浮系统的模型。图中fm表示导磁体对悬浮物的磁力;d表示导磁体与悬浮物之间的距离;d0表示在平衡位置时导磁体与悬浮物之间的距离;z表示悬浮物偏离悬浮平衡位置时竖直方向上的变化量;d=d0-z;θ表示盘状永磁铁顺时针方向的旋转角度;D表示盘状永磁体和导磁体之间的距离。
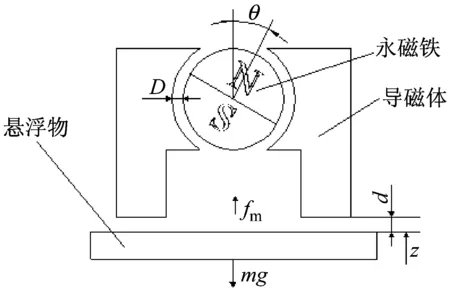
图2 系统模型图
悬浮物的悬浮力数学模型
(1)
式中:km为悬浮力系数;Δdf为导磁体和径向磁化的盘状永磁体气隙处的漏磁补偿系数。
盘状永磁体的力学模型
(2)
式中:kτ为径向磁化的盘状永磁铁的转矩系数;Δdτ为径向磁化的盘状永磁体和导磁体气隙处的漏磁补偿系数。
该系统采用伺服电机驱动盘状永磁体,则系统在平衡位置(d0,θ0)的运动学方程可表达如下
(3)

(4)

2 串级控制器设计
2.1 控制目标及方案
该永磁悬浮系统悬浮物位置的变化是影响系统稳定的一个重要因素,在控制器设计时要求其能够快速、稳定的跟踪参考输入,保持系统稳定。
按照上述要求,根据串级控制的思想,将系统分为角度环和位置环。角度环的控制目标是使盘状永磁体的旋转角度能够快速的响应参考输入,即位置环控制器的输出值;位置环的控制目标是保证系统稳定的跟踪位置的参考输入,使悬浮物稳定悬浮。
控制系统结构如图3所示。由图可知控制系统以悬浮物的位置Refz为输入,分别经PID和PD控制环节计算,得到的结果作为输入实时调节盘状永磁铁的回转角度。

图3 控制系统结构
为验证串级控制器对控制系统悬浮稳定的性能,遵循表1所示的系统结构参数进行悬浮特性的仿真和实验论证。
2.2 角度环控制
本文设计的控制器角度环为内环,位置环为外环,位置控制模式下系统进行两个环的运算,运算量较大,响应速度较慢,同时如果内环的响应速度慢于环外的响应速度,则无法保证外环的稳定,因此系统角度环的响应速度远大于位置环。为了简化计算,可以假设在调节过程中z为零,将由该假设引起的系统模型误差当做参数扰动引起的模型误差。内环采用PD控制器,则从参考角度到输出角度的传递函数可表示为
(5)
2.3 位置环控制
角度环采用上述控制后,在特定的变化范围内近似保证Δθ′(t)=Δθ(t)。外环采用PID控制器,则从参考位移到输出位移的传递函数可表示为
(6)
3 控制特性仿真分析
系统在平衡位置处的各个参数如表1所示。

表1 系统结构参数
选用表1中数据,得控制器参数,kp1=460,kd1=0.8;kp2=400,ki2=2 000,kd2=0.2。利用matlab/Simulink进行抗位移外扰仿真分析,分别对悬浮物的位移z、盘状永磁铁的旋转角度θ、伺服电机电流i进行跟踪,得到结果如图4所示。
在系统处于平衡状态的情况下,在0.2 s时,给系统输入一个0.1 mm阶跃位移信号,经过串级控制,使悬浮物最后达到稳定悬浮状态。图中可以看出串级控
制可以使系统对输入的阶跃信号有很快的响应时间,而且通过不断调节控制器参数可以使系统达到预期的最佳目的。同时串级控制器可以使系统在追踪输入信号时更好地控制稳定,减小位移超调量,缩短反应时间,提高跟踪能力。




图4 阶跃信号响应仿真结果
4 控制特性实验验证
4.1 实验验证方案
本实验中,驱动盘状永磁铁的驱动电机选用日本HarmonicD公司生产的RH-5A8802型号的伺服电机,其参数为:额定电压12 V,转动惯量为6.37×10-4kg·m2,额定回转速度为88 r/min,最高转速为180 r/min。位移传感器选用日本基恩士公司生产的电涡流位移传感器EX-V系列。永磁体材料为钕铁硼NdFeB30,与永磁体正对的“F”形导磁体材料为坡莫合金1J85。
4.2 控制特性的实验结果分析
为进一步验证悬浮可能性及系统响应特性,结合dSPACE控制器搭建可控磁路式永磁悬浮系统实验装置,系统稳定悬浮状态如图5所示。系统中,悬浮物由材质分别为坡莫合金和铁的两种长方体组成,把坡莫合金材质的悬浮物放在上面加强悬浮物的导磁效果,把铁材质的悬浮物放在下面使传感器检测悬浮物的位置;本系统为单自由度系统,悬浮物通过直角板固定在滑块上限定悬浮物只做竖直运动。悬浮实验中,悬浮物内环控制器PD及外环控制器PID分别为kp1=460,kd1=0.8;kp2=400,ki2=2 000,kd2=0.2。

图5 悬浮系统实验装置
实验条件与上述仿真条件相同,采用上述串级控制器和图3的控制系统结构,得到结果如图6所示。
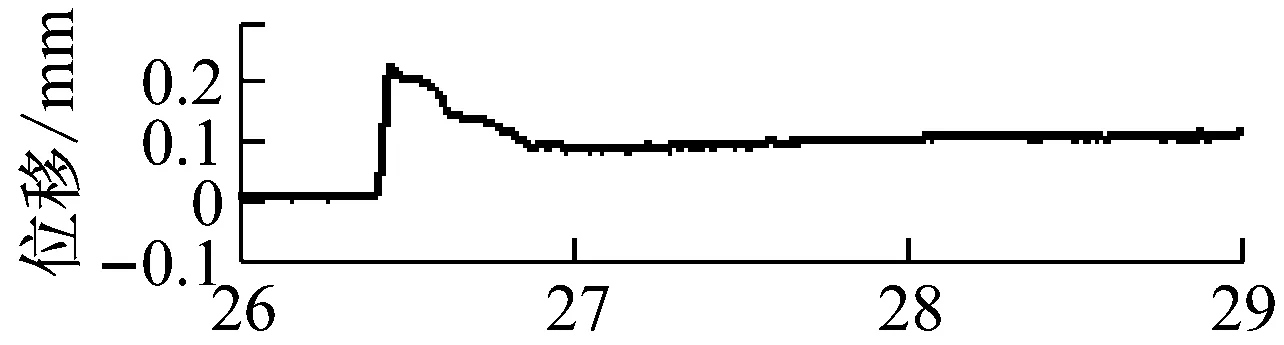

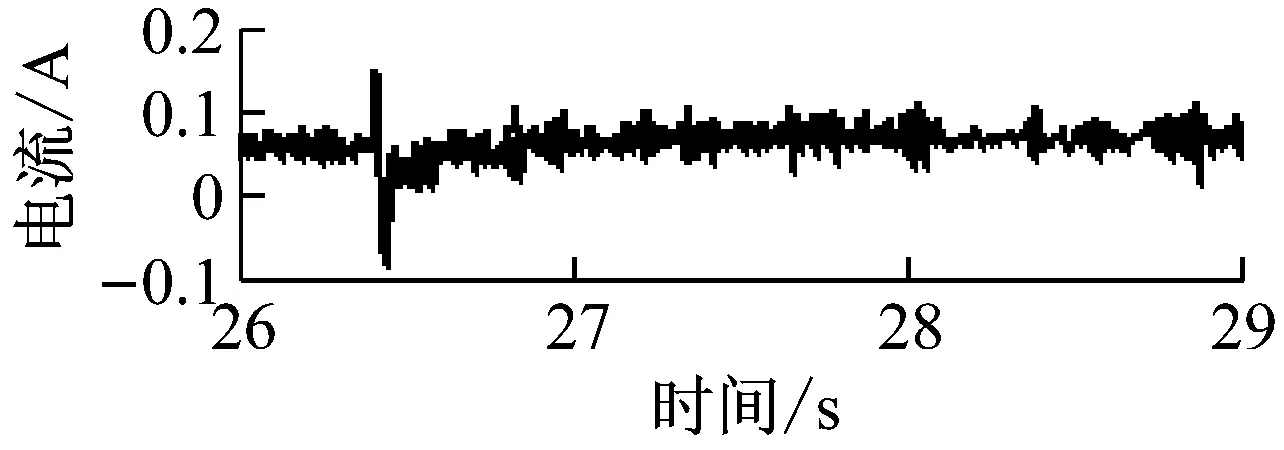
图6 系统实验阶跃响应结果
实验结果表明:在系统处于平衡状态的情况下,给系统输入一个0.1 mm阶跃位移信号,经过串级控制,使悬浮物再次达到稳定悬浮状态。图中可以看出在输入阶跃的作用下,系统的振荡加剧,响应加快,电流变化加快,但是经过调节器调节,系统最终稳定下来,同时因为实验装置存在直线导轨摩擦力的影响,实验结果与仿真结果略有区别。串级控制器在输入阶跃位移实验中也体现了控制的能力。
5 结 论
根据可控磁路式永磁悬浮系统所具有的自身特点,本文设计了一种由角度环和位置环组成的串级控制器。该控制器将可控磁路式永磁悬浮的四阶系统降阶成两个二阶系统,简化了控制器的结构,降低了控制器的设计难度,使得高阶系统的控制变得简单化。同时使系统具有一定的抗干扰能力,能及时跟踪输入位移信号,快速达到系统稳定。仿真和实验数据分析表明该串级控制器可以较好地控制系统的稳定,能够实现悬浮物的稳定悬浮,在跟踪输入阶跃信号中串级控制表现出了较好的稳定性和鲁棒性,同时为了更好的验证串级控制在该系统的控制性能,还需进一步优化实验装置,减小摩擦力对实验的影响。
参 考 文 献
[1] SUN F, OKA K. Development of noncontact suspension mechanism using flux path control disk magnet rotation[J]. Transactions of the Japan Society of Mechanical Engineers, 2010, 76(771): 2916-2922.
[2] OKA K. Noncontact manipulation with permanent magnet motion control[C]∥Proceeding of the 4th International Symposium on Linear Drivers for Industry Applications: Birmingham: CDROM, 2003: 259-262.
[3] 宋文荣,于国飞,王延风. 磁悬浮微进给机构的控制[J]. 哈尔滨工业大学学报, 2004, 36(1): 28-31.
SONG Wenrong,YU Guofei,WANG Yanfeng. PID control of micro feed mechanism based on magnetic levitation trchnology[J]. Journal of Harbin Institute of Technology, 2004, 36(1): 28-31.
[4] 刘恒坤,郝阿明,常文森. 磁悬浮系统的非线性PID控制[J]. 控制工程, 2007, 14(6): 653-656.
LIU Hengkun,HAO Aming,CHANG Wensen.Nonlinear PID control of magnetic suspensi on systems[J]. Control Engineering of China, 2007, 14(6): 653-656.
[5] 陈龙,陈建军,张雪峰. 不确定结构振动的保成本鲁棒PID控制[J]. 振动与冲击, 2007, 26(6): 79-89.
CHEN Long,CHEN Jianjun,ZHANG Xuefeng. Guaranteed cost robust PID control for uncertain structure vibration[J]. Journal of Vibration and Shock, 2007, 26(6):79-89.
[6] 李荣,焦晓红,杨超. 基于动态输出反馈的半车主动悬架系统鲁棒控制[J]. 振动与冲击, 2014, 33(7): 187-193.
LI Rong,JIAO Xiaohong,YANG Chao. Output feedback-based robust control for a half-car hydraulic active suspension syetem[J]. Journal of Vibration and Shock, 2014, 33(7): 187-193.
[7] 孙兴伟,夏鹏澎,金俊杰,等. 可控磁路式永磁悬浮系统的模糊鲁棒控制[J]. 组合机床与自动化加工技术, 2016, 2(2): 76-78.
SUN Xingwei,XIA Pengpeng,JIN Junjie,et al. Fuzzy robust control of permanent magnetic suspension system using variable flux path control method[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2016, 2(2): 76-48.
[8] 舒光伟,REINHOLD M. 基于Simulink的磁悬浮控制系统仿真[J]. 系统仿真学报, 2008, 20(8): 2168-2171.
SHU Guangwei,REINHOLD M. Simulation of magnetic suspension control system based on simulink[J]. Journal of System Simulation, 2008, 20(8): 2168-2171.
[9] 申恺,孙纯祥. 主动磁悬浮系统的MATLAB仿真研究[J]. 工业仪表与自动化装置, 2008, 4: 7-10.
SHEN Kai,SUN Chunxiang. Research on an active magnetic suspension system with matlab simulation[J]. Industrial Instrumentation & Automation, 2008, 4:7-10.
[10] 周瑾,倪佐僖. 基于不平衡响应的磁悬浮轴承刚度阻尼辨识方法研究[J]. 振动与冲击, 2013, 23(3): 29-34.
ZHOU Jin,NI Zuoxi. Identification method for stiffness and damping of magnetic bearings on rotor unbalance responses[J]. Journal of Vibration and Shock, 2013, 23(3): 29-34.
猜你喜欢
中国伤残医学(2022年14期)2022-12-23
化工管理(2022年14期)2022-12-02
材料与冶金学报(2022年2期)2022-08-10
现代交通与冶金材料(2022年3期)2022-06-15
湖北汽车工业学院学报(2021年4期)2022-01-11
能源工程(2021年6期)2022-01-06
中华骨与关节外科杂志(2021年12期)2021-08-31
沈阳工业大学学报(2018年4期)2018-07-18
中国卫生标准管理(2015年3期)2016-01-14
中外医疗(2015年11期)2016-01-04