
CALM单点系泊油船“鱼尾效应”
2018-11-01 01:46
中国海洋平台 2018年5期
(海洋石油工程股份有限公司, 天津 300451)
0 引 言

图1 油船艏向时历曲线
单点系泊系统中的船舶受到风、海流和波浪等外力作用会产生长周期的鱼尾状摆动。以CALM单点系泊系统为例,图1为产生鱼尾摆动时,油船艏摇角度的时历曲线。可以看出,虽然风浪流同向,但油船艏向并不稳定,油船在平衡位置处做周期性摆动,这种现象被称为“鱼尾效应”。在有些情况下,艏摇运动的幅度会很大,油船无法保持在环境力最小的方向,这样系船缆、锚链中会产生较大的张力,导致断缆、走锚等事故[1]。随着海上油田的开发与原油装卸的需要,此问题越发得到重视,人们对此进行了广泛的研究。
现有研究通常基于某个特定因素进行,或者基于试验结果对现象进行分析,鲜有对该问题的全面分析和研究。本文针对CALM单点系泊系统存在的“鱼尾效应”,采用时域耦合的方法对该现象进行数值模拟,对影响该效应的外部环境因素和系统内部参数进行全面分析。
1 系统描述
CALM单点系泊系统包括:外输浮筒、系泊锚链、系船缆、漂浮软管、水下软管、水下管汇和海底管道等。外输浮筒通过6条相互间隔60°分布的锚链系泊到海床。在浮筒顶部配备转台以允许连接的油船具有风向标效应以减小油船所受的环境载荷。油船通过系船缆连接到浮筒的转台上。原油通过漂浮软管从油船输送至外输浮筒上,再经水下软管输送至海床上的水下管汇,最后通过海底管道输送至陆地炼厂。
本文数值分析所采用的坐标系如图2所示,风浪流等环境条件沿着x轴正向定义为0°,沿着y轴正向定义为90°。图3为系泊分析模型。

图2 系泊分析坐标系 图3 系泊分析模型
整个CALM系泊系统的参数见表1。数值分析的基准环境条件为JONSWAP(Joint North Sea Wave Project)波谱,有义波高为2.5 m,谱峰周期为8 s,NPD(Norwegian Petroleum Directorate)风谱,风速(1 h)为14.5 m/s,表面流速为0.75 m/s。

表1 CALM系统参数
对该系统进行3 h时域耦合分析,可以得到系泊锚链的张力曲线、系船缆的张力曲线,如图4和图5所示。
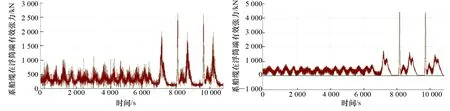
图4 系泊锚链张力时历曲线 图5 系船缆张力时历曲线
由图4和图5可以看出:由于“鱼尾效应”的存在,油船的艏向无法稳定在某一角度,艏摇角度逐渐增大,围绕平衡位置作长周期的振荡,油船无法保持在环境力最小的方向,油船发生鱼尾摆动时系船缆会产生脉冲张力[2],这是系船缆容易发生断缆的主要原因。
2 “鱼尾效应”环境敏感性分析
对于给定的系统,“鱼尾效应”主要受到环境条件的影响,本节分析风流力对 “鱼尾效应”的影响。主要对比参数有艏摇幅值、锚链和系船缆张力时域最大值。
2.1 风速的影响
以原有环境条件为基础,改变风速,增加计算风速为5 m/s和25 m/s时系统的响应,结果见表2。

表2 风速对系统响应的影响
由表2可以看出:随着风速的增加,艏摇幅值降低,但程度有限,系船缆张力的时域最大值明显下降,说明风速的增加会降低艏摇幅值,从而降低系船缆张力。
2.2 波浪周期的影响
以原有环境条件为基础,改变谱峰周期,增加计算谱峰周期为6 s、10 s和12 s时系统的响应,结果见表3。

表3 波浪周期对系统响应的影响
由表3可以看出:随着谱峰周期的增加,艏摇角度略有增加,但变化不大,基本保持在30°左右,系船缆张力响应水平基本相当,说明波浪周期对“鱼尾效应”的影响较小。
2.3 流速的影响
以原有环境条件为基础,改变流速,增加计算流速从0.3~1.0 m/s时系统的响应,结果见表4。

表4 流速对系统响应的影响
由表4可以看出:随着流速的增加,艏摇角度显著增加,系船缆张力也显著增加,当流速很小时,基本不会发生“鱼尾效应”。
3 “鱼尾效应”控制方法分析
严重的“鱼尾效应”会导致系泊系统张力响应大幅增加,因此必须采取合适的措施来抑制该运动,使艏摇响应控制在合理范围内。本节分析系统自身参数对“鱼尾效应”的影响。主要对比参数:艏摇恢复刚度、艏摇阻尼、艉部拖船力和系船缆长度。
3.1 艏摇恢复刚度的影响
艏向控制系统有助于控制“鱼尾效应”[3]。在数值分析中,艏向控制系统可以简化模拟为通过外加艏摇恢复刚度来控制艏摇。在实际系统中,可以通过DP系统或外加的分布系泊系统来实现该刚度。
以原有环境条件为基础,计算在不同艏摇恢复刚度时系泊系统的响应,结果见表5。

表5 艏摇恢复刚度对系统响应的影响
由表5可以看出:随着艏摇恢复刚度的增加,系船缆和锚链的最大张力均逐渐下降,当艏摇角度小于5°时,张力响应水平基本相当。
3.2 艏摇阻尼的影响
油船艏摇时会受到流体的阻尼力,阻尼力的计算公式如下:
ρω2K(1)
阻尼力也会直接影响油船的艏摇响应,在实际系统中,阻尼力D会受到海水密度ρ,艏摇角速度ω,以及阻力系数K的影响,WICHERS[4]发现传统的切片理论会严重低估系数K。在实际操作中,K的确需要模型试验等方法进行确定。
以原有环境条件为基础,增加艏摇阻力系数,计算不同K值的系统响应,结果见表6。

表6 艏摇阻尼对系统响应的影响
由表6可以看出:随着艏摇阻力系数的增加,系船缆和锚链的最大张力均逐渐下降,当艏摇角度小于15°时,张力响应水平基本相当。
3.3 尾部拉力的影响
通过辅助拖船连接到油船的船尾,通过拉力控制油船的艏向,这可以将“鱼尾效应”控制到一个可接受的程度。在数值分析中,在对油船尾部施加拉力时,如果油船发生艏摇,拉力会产生复原力矩,从而可以控制艏摇幅度。
以原有环境条件为基础,增加尾部拉力,计算不同拉力值时系统的响应,结果见表7。
由表7可以看出:随着尾部拉力的增加,锚链和系船缆最大张力呈下降趋势,当艏摇角度小于15°时,进一步控制艏摇对系统响应的影响不大。
3.4 系船缆长度的影响
如果调整系船缆长度,当油船发生艏摇时,系船缆产生的复原力矩会有所不同,相关研究表明系船缆变短有利于控制艏摇,增加系船缆长度会导致增加“鱼尾效应”的趋势。
以原有系统为基础,调整系船缆长度,计算不同系船缆长度时系统的响应,结果见表8。

表7 尾部拉力对系统响应的影响

表8 系船缆长度对系统响应的影响
由表8可以看出:随着系船缆长度的增加,艏摇幅度变大,但张力变化较小,总的张力响应在同一水平,考虑到系船缆长度的可变范围有限,可以认为单纯调整系船缆长度不能对艏摇运动进行有效控制。
4 结论和建议
通过对产生“鱼尾效应”的原因分析以及环境敏感性和控制方法的计算分析,可以得到以下结论:
(1) 当风流力同向时,由于风流的作用,油船可能产生显著的“鱼尾效应”。当其造成的艏摇运动的幅度控制在15°以内时,该系统锚链最大张力基本相当,但艏摇运动幅度过大会造成系统动力响应大幅增加。
(2) 增加油船艏摇的恢复刚度,增加油船艏摇阻尼,在油船尾部增加拉力,可以有效控制艏摇幅度,进而控制系统的动力响应。
(3) 减少系船缆的长度有助于降低艏摇摆动,但效果有限,不能明显降低张力响应。
针对计算结果和结论,对该类型系统的设计提出以下建议:
(1) 由于“鱼尾效应”会对系统响应产生很大影响,在实际工程中,应该针对特定的系统和环境对“鱼尾效应”进行研究,如果证明存在显著的“鱼尾效应”,则应当考虑采取措施控制其幅度,保证系统的可靠性。
(2) 在对该现象进行模拟分析时,计算模型或模型试验均不能采用定常力的方法施加风流力,因为这种方法不能准确估计“鱼尾效应”的影响。
(3) 艏摇阻尼会对系统“鱼尾效应”产生重要影响,但现有数值方法无法准确计算艏摇阻尼,建议进行模型试验测得该阻尼。
猜你喜欢
船海工程(2021年6期)2021-12-17
东坡赤壁诗词(2020年3期)2020-07-04
船舶标准化工程师(2020年1期)2020-06-12
江南诗(2020年3期)2020-06-08
船舶(2018年1期)2018-12-07
儿童故事画报(2018年9期)2018-10-23
中国修船(2018年5期)2018-10-17
中国水运(2015年5期)2015-07-13
少年文艺(2015年6期)2015-05-28
船海工程(2013年6期)2013-03-11
