
基于深度学习的耕地变化检测技术
2019-06-25 09:54楚博策王士成陈金勇
无线电工程 2019年7期
高 峰,楚博策,帅 通,王士成,陈金勇
(中国电子科技集团公司 航天信息应用技术重点实验室,河北 石家庄 050081)
0 引言
耕地是农业的基础,伴随着信息化时代的到来,应用空间信息化技术进行耕地信息的快速获取与检测己成为时代发展的必然。尤其是近年来,随着我国改革开放的深入,准确地掌握区域范围内耕地分布和变化情况,不仅是技术发展的需要,更是开展农业发展宏观管理的必需。
石家庄是华北平原地带经济发达地区的城市,现代农业发达,是华北地区主要农产品供应基地。耕地是农业生产发展的基础,是社会稳定的前提条件。但由于石家庄耕地区域覆盖面大、分布广,针对该区域的耕地资源调查较为耗时耗力,除此之外,针对国家出台的“退耕还林”“严厉查处违法占地”等政策的落实情况也急需实现核查验证。因此,在耕地形势日益严峻的大形势下,有效利用遥感检测技术明确现有可利用耕地面积与变化情况[1-2]显得尤为重要。
遥感影像耕地提取目前在各监管部门主要采用人工目视解译的方法[3-4],随着卫星载荷与数据量的逐步增加,特别是面对高频率、大范围耕地区域对比,传统人工标定的方法难以支撑爆发式增长的任务与需求,因此,研究如何采用人工智能的方法实现遥感影像智能化处理是一项具有深远意义的工作。
随着人工智能的不断发展,深度学习[5]已经在语音识别、图像识别和信息检索等领域取得了成功,这些应用也证明了深度学习是一种行之有效的自动化分类识别工具。这一类模拟大脑学习过程的方法相比传统人工设定特征内容的方法具有更好的特征抽象性和鲁棒性。然而,目前将深度学习应用于遥感地物变化检测的研究工作相对较少。本文采用一种基于深度学习语义分割的遥感影像耕地提取方法,将应用于语义分割任务的深度学习模型——全卷积深度网络,进行遥感影像的耕地提取,实现了分割与分类过程的一体化,通过对比多时相影像分类结果实现耕地资源的变换检测。实验表明,设计的深度学习方法在耕地变化检测中具有较好的应用效果。
1 遥感耕地变化检测技术处理流程
本文设计的基于深度学习的耕地变化检测流程如图 1所示。

图1 耕地变化检测流程
采用深度学习的方法首先要对遥感影像进行地物标注,随后采用全卷积网络对影像进行网络训练,其中包括卷积特征提取和反卷积映射,通过从下到上的上采样计算得出原始图像中每个像素所属类别的概率,最后通过标注影像和网络输出影像对比计算损失函数实现网络模型训练。在进行变化检测时,首先需要对同一区域多时间点的2幅影像进行切块,对切块影像采用之前训练得到的模型进行耕地区域分类[6],通过影像配准[7-8]实现分类结果精确对准,随后采用差值法[9]直接得到耕地变化结果。由于全卷积网络为像素级分割网络,因此变化对比结果会出现较多像素碎片,本文采用腐蚀、膨胀等形态方法[10]进行后处理得到最终变化检测结果。
2 全卷积深度学习网络
传统的耕地提取方法[11]大多采用分割+分类的2阶段模式,分类结果不单取决于分类模型的精度,还受制于分割结果的准确性。全卷积神经网络(FCN)[12]可以做到对图像进行像素级的分类,实现端到端的原始影像至分类结果的直接生成,解决了语义级别的图像分割(Semantic Segmentation)问题,因此较为适合应用于耕地提取任务当中。
传统CNN分类网络通常会在最后连接几层全连接层,它将原来二维的矩阵(图片)压扁成一维的,丢失了空间信息,最后训练输出一个标量(也就是分类标签)。而耕地提取任务不但要知道图像中包含的地物类别,还需要分割出不同地物所处的位置。本文采用的FCN,相比于其他CNN,不同的是去掉了原始CNN最后的全连接层,采用反卷积层对最后一个卷积层的特征映射进行上采样,使它恢复到输入图像相同的尺寸,最后逐个像素计算softmax分类的损失,相当于每一个像素对应一个训练样本。因此可以对每个像素都产生一个预测,保留了原始输入图像中的空间信息。具体网络结构如图2所示。
将全卷积后的结果直接上采样,得到的结果是很粗糙的。由于高分辨率遥感图像具有非常细节的信息,底层低分辨率语义特征直接进行图像分类,将会产生明显的误差,所以FCN将不同池化层的结果进行上采样后,与下采样后的结合形成优化输出后,进行上采样得到最终分类结果[13]。

图2 FCN网络结构
3 耕地变化检测方法
本文采用SITF-RANSAC[14]方法实现不同时间拍摄的同区域影像精配准,由于耕地分类结果为二值图形式,可以直接对2幅分类结果图进行求差操作,得到耕地变化初始结果,通过对其进行形态变换后处理得到最终变化检测结果[15]。图3(a)和图3(b)中为输入的2幅不同时间的影像,分别进行耕地提取得到图3(c)和图3(d)两幅二值影像,对其求差得到粗糙的变换检测结果,随后通过形态学后处理得到图3(f),可以看出后处理能有效地减少神经网络带来的像素级斑点误差。

图3 耕地变化检测效果
4 实验与分析
4.1 实验数据集制作
本文中涉及的训练和测试数据为实际地区的RGB可见光影像,影像获取主要从Google Earth等软件中进行截取,将该区域的宽幅影像裁切为512×512的标准影像块并自行标注,总共包括500余幅影像块,其中训练集与测试集比为5∶2,影像空间分辨率为10 m。该区域地物类型主要包括耕地与城镇区域。
4.2 网络参数设置
本文实验中设置学习速率的初始值为0.000 1,随着训练误差的变化趋势动态调整学习速率。由于全卷积网络内存占用率较高,实验中将样本集设置为小样本集batch_size为10个样本进行分批训练。由于本次实验为二分类,随着迭代次数增加准确率逐渐上升同时容易产生过拟合,实际应用中应酌情控制迭代次数,本次实验准确率与迭代次数关系如图4所示。

图4 耕地提取准确率与迭代次数关系
由图4可以看出,在训练集中,随着迭代次数增加,准确率不断升高,而测试集中,当迭代次数超过20 000次后准确率下降,表明此时模型已过拟合,因此实验选取20 000次迭代得到最终模型。
4.3 实验结果与分析
实验中对100余幅512×512影像作为测试样本进行测试。实验结果如表 1所示,可以看出耕地提取结果可达到98%以上,相比传统方法85%左右的精度来说提升10%。除此之外,据统计,人工目视判读的平均精度为95%,本文方法已经在一定程度上优于人工判读结果。变化检测结果约95%,已达到实际应用的标准。
表1 不同网络输入分类效果对比表
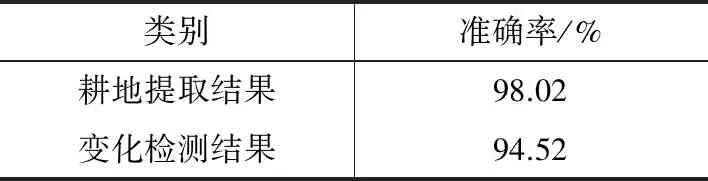
类别准确率/%耕地提取结果98.02变化检测结果94.52
本文软件的实现采用Tensorflow架构和Python脚本语言,硬件配置GPU采用NVIDIA Quadro P5000,内存为48 GB。基于该硬件配置本文算法运行速率可达到0.2 s/幅(512×512尺度影像),10 000×10 000影像的处理时间约为30 s左右,相比于传统人工方法接近6 h/景的处理时长,本技术在时效性上具有较大提升。
5 结束语
本文将全卷积深度神经网络与耕地范围提取任务相结合,实现目前机器学习方法中最优提取结果,随后通过配准、取差和后处理等方法提取不同时段变化区域,实现耕地范围的自动化变化检测。此方法无论在准确率还是在计算速率方面均具有较大优势,由此可见采用全卷积深度学习的变换检测方法逐步取代人工目视判读将成为今后的发展趋势。
深度学习在遥感影像变化检测领域具有较大潜力,但是作为一种新兴的技术,仍有很多工作需要研究,下一步,将研究除了耕地之外不同地物特性与不同深度学习网络结构之间的关系进而实现更高精度更多类别的耕地提取。除此之外,本文变化对比所采用的差值方法较为粗糙,后续将根据不同业务对象研究不同的对比方式进而提高变化检测精度。
猜你喜欢
中国化肥信息(2022年8期)2022-12-05
今日农业(2022年13期)2022-11-10
北京航空航天大学学报(2022年8期)2022-08-31
今日农业(2021年14期)2021-11-25
北京航空航天大学学报(2021年9期)2021-11-02
计算机系统应用(2021年9期)2021-10-11
计算机应用(2021年8期)2021-09-09
电子制作(2019年11期)2019-07-04
当代陕西(2019年10期)2019-06-03
北京航空航天大学学报(2018年1期)2018-04-20
