
基于改进重采样的粒子滤波红外车辆跟踪算法
2019-06-25 09:54马天超
无线电工程 2019年7期
马天超
(哈尔滨工程大学 信息与通信工程学院,黑龙江 哈尔滨 150001)
0 引言
在目前的多种目标跟踪算法中,常用于红外目标跟踪的主要分为基于图像对比度分析的方法[1],基于图像特征匹配的方法[2]及基于核的目标跟踪方法[3]。对于背景均匀的包含目标的图像,目标与背景差异较大,基于图像对比度分析的方法主要是通过目标与背景的灰度信息差异来进行跟踪,对于复杂背景目标,此类方法效果较差,基于对比度的跟踪方法主要分为质心跟踪[4]及边缘跟踪[5]。基于特征匹配的目标跟踪方法利用目标在连续帧图像中所具有的某种特征,在后续图像中完成特征匹配,达成目标跟踪。用于目标跟踪的特征有Haar特征[6]、SIFT特征[7]和直方图特征[8]等,对于某些红外图像,灰度特征不够丰富[9],于是与形状相关的特征则更为常用。基于核方法的跟踪算法主要通过估计目标的后验概率密度函数来得到目标的状态,也就是先进行预测再跟踪,Meanshift算法[10]是最先被开发使用的该类方法,利用了先预测再进行跟踪的思想,相对于提取全局信息进行跟踪而言是一个较大的改进。基于Meanshift算法的理论,后续实验人员对其进行了改进,保留其核方法的本质,相继研究出Kalman滤波[11]、粒子滤波[12]等多种可应用于红外图像的核方法。高璐等人[13]提出一种红外序列图像目标跟踪的自适应Kalman滤波方法,利用函数估计的思想改进了目标运动模型,将最小二乘支持向量机应用于对当前目标运动模型的估计,取得了良好的效果。李蔚[14]等人提出了一种多特征融合的优化粒子红外目标跟踪方法,融合目标梯度特征[15]和灰度特征建立观测模型并自适应更新模板,能够显著改善目标受遮挡状况。
本文对传统粒子滤波算法中的状态方程进行更新,对重采样过程进行改进,提出基于改进粒子滤波算法的红外图像目标跟踪算法。
1 红外车辆目标跟踪
红外车辆目标跟踪算法流程如图1所示。

图1 红外车辆目标跟踪算法流程
① 预处理阶段:对红外图像进行Top-Hat变换,除去与目标相近的背景;
② 目标检测阶段:利用图像准则进行图像信息融合,对目标位置进行标定;
③ 目标跟踪阶段:利用图像准则对粒子滤波状态方程进行改进,并对粒子滤波重采样方法进行改进,完成红外车辆图像检测与跟踪。
2 预处理与目标检测
2.1 预处理阶段
通常状况下,对于红外图像增强需要应用形态学滤波,经过处理后的红外图像会更加适合进行特征提取、目标识别等后续工作。研究者提出图像形态学Top-Hat变换[16],通过选择合适的结构元素,对原图像实施开运算获取图像的背景信息,再利用原图像减去开运算后图像,即可完成图像的Top-Hat变换,如图2所示。

图2 Top-Hat仿真结果
2.2 检测阶段
红外图像序列有其特有性质,将此类性质定义为图像准则。本研究中用到的图像准则包括图像的面积准则、灰度准则、位置准则及帧间速度加速度差异等。
图像的面积准则通过比较前后两帧目标区域的面积,排除非感兴趣区域或无目标区域,长宽比与圆形度是衡量图像面积准则的重要参数。图像的长宽比是目标长与宽的比值;圆形度为衡量与圆近似程度的值,定义为e=4πs/c2,其中s是图像面积,c是周长。圆的圆形度为1,图像越扁,其圆形度越小,现随机取多帧图像序列并对其进行研究。在目标检测过程和跟踪过程中,首先利用红外面积准则与灰度准则来筛选疑似目标,对于面积明显过大目标及长宽比较大(线形)目标予以排除。同时,在粒子滤波应用过程中也可利用面积准则来维持跟踪的稳定性。对于灰度与面积准则满足要求的目标,根据目标的位置即可将目标区分,同时在跟踪过程中,帧间位置差可代替速度的变化,由这些速度带来的加速度改变也可作为状态方程的重要部分,对红外车辆图像序列进行分析,红外车辆目标长宽比与圆形度信息如表1所示。
表1 红外车辆目标长宽比与圆形度
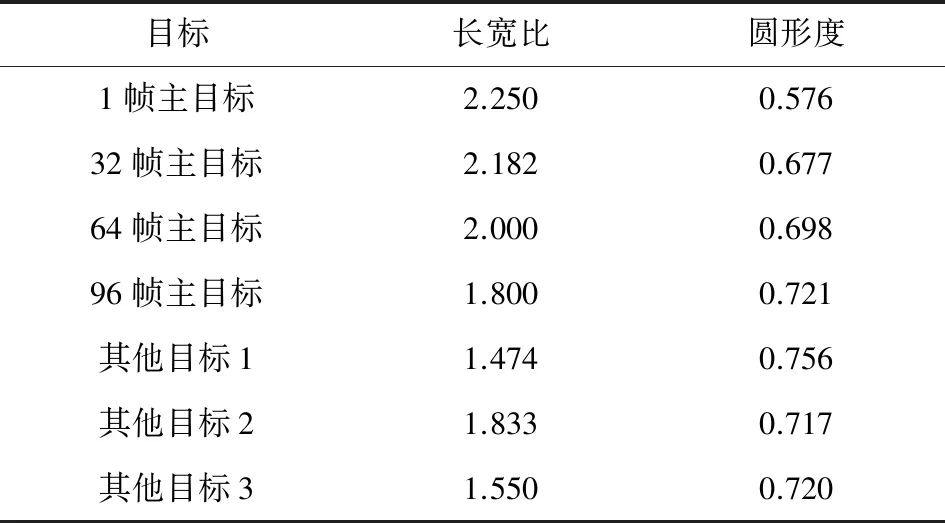
目标长宽比圆形度1帧主目标2.2500.57632帧主目标2.1820.67764帧主目标2.0000.69896帧主目标1.8000.721其他目标11.4740.756其他目标21.8330.717其他目标31.5500.720
分析表1中长宽比与圆形度,红外车辆目标长宽比信息稳定在1.5~3,圆形度稳定在0.50~0.75。由此可得出结论,综合运用图像准则的图像融合方式可在目标的检测跟踪过程中得到应用。
3 目标跟踪
3.1 算法流程
基于上述对图像信息融合的论证,将对状态转移方程进行更新,新的状态转移方程融合了图像的速度,面积准则,位置准则,灰度准则,与帧间目标大小。此方法与文中提到的方法相比计算量较小,能显著降低粒子滤波使用的粒子数目。
算法流程如下:
① 提取图像,进行预处理;
② 初始化粒子:利用图像准则对疑似目标进行标定,初始化粒子参数,其坐标即为标定中心,作为初始模板,获取当前的目标状态,将粒子均匀散布于目标上(以目标中心为粒子散布中心);记录此时中心坐标为跟踪起始点(x,y);
③ 状态转移:下一帧起开始进行粒子滤波过程,记录本帧坐标,根据两帧间位置差可计算x轴及y轴速度,若两帧间圆形度相差过大时,认为目标丢失,重新检测目标位置。
以x轴为例,在预测后续位置时,将记录连续4帧间的速度v1,v2,v3,v4,并设权值mi对预测速度vpx进行调整,每帧速度应与前一帧速度有较大相关性;同时利用4帧间速度求得加速度a1,a2,a3也将被用于预测方程中,其权值为nk,定义如下:
vpx=∑vimi+∑aknk+Δ,
(1)
式中,Δ为高斯随机数,对粒子群进行微调,使其均匀分布在预测位置周围,同理可得y轴预测方向。当帧间速度趋于稳定时,式中第二项对速度预测影响将会变小;每个速度的预测值均与前一帧相关性较大。
则每个粒子预测位置为:
xp=xpre+vpxt,
(2)
yp=ypre+vpyt。
(3)
④ 权值选择及最终预测位置确定:每帧跟踪时会获得多个预测位置,通过加权来获取最终预测位置,第一帧时设定每个粒子权值均为1/N,第二帧起,权值由重采样及与真实位置的巴氏距离来决定。
巴氏距离及巴氏系数定义如下:
DB(p,q)=-ln(BC(p,q)),
(4)
(5)
观测方程:对粒子在这一状态的评价。即这个状态与最优相比的好坏程度,决定后续权重的大小。最终位置为St=∑WiSpi,Wi为各粒子权值,Spi为各粒子对应预测位置。
⑤ 粒子状态更新及重采样:对于本帧已实现跟踪过程的粒子,在下一帧预测状态时为了保证其准确性要进行状态更新,在此进行改进系统重采样来抑制退化现象,完成粒子状态更新过程;然后,进入下一帧的跟踪过程。
3.2 重采样改进
首先设定权值阈值w0,粒子数目阈值T,粒子总数N,对高于阈值w0权值的粒子进行保留,并对其进行系统重采样来生成T个粒子;再取低于该阈值的粒子权重的粒子进行系统重采样生成剩余N-T个粒子;最后将这N-T个粒子与对应的高权值粒子进行加权,生成新的粒子权重作为这部分粒子的权重,剩余粒子的位置也由高权值与低权值粒子的位置共同决定,具体步骤如下:
④ 综合两部分粒子,进行权值归一化,完成后续操作。
4 实验结果与分析
4.1 实验环境
分别对改进系统重采样方法及改进粒子滤波方法进行实验仿真,并与传统方法比较其优劣性,实验环境为普通个人笔记本电脑,系统Windows 10,CPU:Intel(R) Core(TM) i7-8750H,主频2.60 GHz,内存:8.00 GB。软件环境为Matlab 2017a,Visual Studio 2012。
4.2 实验分析
对于重采样方法,常用ARIMA模型进行仿真:
xk=xk-1/2+25xk-1/(1+xk-12)+8cos1.2k+wk,
(6)
yk=xk2/20+vk,
(7)
式中,k表示状态时刻;xk表示状态量;yk表示观测量,状态初始值为x0=0.1,初始分布为p(x0)~N(0,5.0),过程噪声w~N(0,5.0),观测噪声v~N(0,1.0),粒子数目取100,500,1 000;对5种方法分别采取50次独立实验,针对多项式重采样,系统重采样,分层重采样,残差重采样,改进重采样5种重采样方法进行复杂度及运行时间对比,结果如表2所示。
表2 重采样算法比较

算法名称多项式系统分层残差改进算法复杂度O(nlogn)O(n)O(n)O(n)O(n)运行时间/s0.024 10.012 50.012 50.019 00.020 70.125 60.061 00.063 80.096 50.102 20.263 70.123 20.125 90.189 20.196 8
综上所述,随着粒子数目的增加,各种算法运行时间呈线性变化。在粒子滤波进行过程中仍无法避免退化现象的发生,伴随着粒子滤波的进行,跟踪误差将会逐渐变大,这在后续仿真中也有所体现,但是在生成新粒子方面,改进系统重采样与残差重采样均生成新粒子,这对补充粒子种类,抑制退化现象有一定的帮助。
在粒子滤波跟踪过程中采用960×720像素大小的红外序列2×200帧。实验中,标准系统重采样粒子滤波算法(PF),改进系统残差重采样粒子滤波(PFRSR),基于方向梯度的粒子滤波算法(PF/WS)作为同类算法进行比较,设定粒子数目为500。这里引入均方误差来比较这几种方法。
红外图像序列利用PFIR(Particle Filter Based on Improved Resampling)方法进行跟踪的结果如图3和图4所示。

图3 红外图像序列PFIR跟踪结果

图4 红外图像序列PFIR跟踪结果
无论何种算法,随着跟踪时间的增长,误差都在逐渐增大,这也是由于粒子的退化所导致的,4种方法帧间平均均方误差及运行时间对比如表3所示。
表3 红外车辆图像序列跟踪算法结果
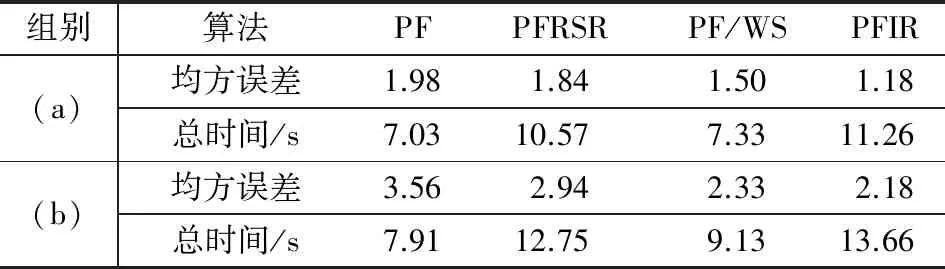
组别算法PFPFRSRPF/WSPFIR(a)均方误差 1.981.841.501.18总时间/s7.0310.577.3311.26(b)均方误差 3.562.942.332.18总时间/s7.9112.759.1313.66
对比标准PF算法,在重采样方面采用残差系统重采样的PFRSR算法及在状态方程中采取方向梯度的PF/WS算法均在跟踪准确度上有所提升,而状态方程相较于重采样方法的更新更为重要,而本文提到的PFIR算法由于分别对状态方程及重采样方式进行了改善,导致运行时间方面有所降低。
对于传统PF算法,随着图像序列的增加,抗干扰能力较弱,误差较大。本文设计的PFIR方法则是从图像信息入手,以图像准则作为粒子滤波的辅助手段可以有效排除周围环境的干扰,但是对较低信噪比及遮挡情况下有待继续研究。
5 结束语
在传统的粒子滤波算法中,状态方程仅由帧间位置决定,整个系统抗干扰能力较弱;在重采样过程中,传统方法仅保留大权重粒子剔除小权重粒子,导致粒子衰竭现象的发生。本文提出基于改进粒子滤波算法的红外图像目标跟踪算法,充分利用图像内部信息,将图像准则应用于状态方程,使状态方程更加完善;对于重采样则提出改进系统重采样的方法,将小权重粒子加以保留,与大权重粒子进行加权产生新粒子,保证粒子的多样性。与传统PF算法,基于残差系统重采样的PFRSR方法,基于方向梯度的PF/WS方法相比跟踪效果有所提升,兼顾了高权重粒子的保留与新粒子的生成,对粒子滤波退化现象有一定的改善。
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
环球时报(2022-05-23)2022-05-23
金桥(2021年4期)2021-05-21
邮电设计技术(2021年2期)2021-03-13
兵器装备工程学报(2021年1期)2021-02-22
计算机与数字工程(2019年11期)2019-11-29
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25
价值工程(2018年13期)2018-05-03
中国科技纵横(2017年9期)2017-06-27
