
基于LoRa的智慧停车管理系统设计
2019-06-25 09:54张正华江沛莲陈赏恩
无线电工程 2019年7期
丁 敏,张正华,苏 权,苏 波,周 宇,江沛莲,陆 辉,陈赏恩
(1.扬州大学 信息工程学院,江苏 扬州 225127;2.扬州国脉通信发展有限责任公司,江苏 金坛 225002)
0 引言
根据调查,2018年我国传统模式的停车位数量已经超过8 000万个,到了2020年,停车位的需求量将会是现在停车位数量的4倍,远超城市空间的容纳能力[1]。为缓解停车场车位空置率高,车场信息不流通的问题[2],搭建智慧停车系统尤为重要。
在目前的智能交通领域,常用超声波检测[3]、红外检测[4]和地感线圈检测[5]等技术来检测停车位[6],这些技术具有易受天气和温度等因素影响或者施工难度大且功耗高的缺点。而在传统的车辆身份识别中,市面上较多的是利用摄像头图像识别车辆牌照的技术[7],其采集的图像易受噪声污染、光照影响而难以识别[8]。此外,常用的物联网无线传输技术如蓝牙、NB-IoT[9-10]等难以将远距离传输与低功耗结合。
本设计针对上述停车管理系统中出现的问题,提出了一套适用、先进、可靠和经济的智慧停车管理系统,能有效提高停车位上车辆的识别率,降低了工作人员工作强度,大大提高了管理效率。
1 系统总体设计
系统通过地磁传感器检测停车位,不仅对路面的破坏小,也不易受环境因素的影响[11],配合使用RFID[12]技术识别车辆身份信息,相较于基于摄像头的图像检测技术则较为高效、准确。当信息采集完成后使用LoRa实现采集设备和网关之间无线通讯,LoRa超远距离传输及低功耗的核心优势解决了目前在大面积的停车管理中,不可能每台前端采集设备使用GPRS直接与无线网连接而造成成本浪费的问题[13]。最后,网关将信息发送到云服务器,实现停车场状态的实时显示,智能指引车辆去往空闲停车场,提高了空闲停车场的利用率。系统的主要环节包括采集节点、网关、云服务器和电脑客户端,系统结构如图1所示。
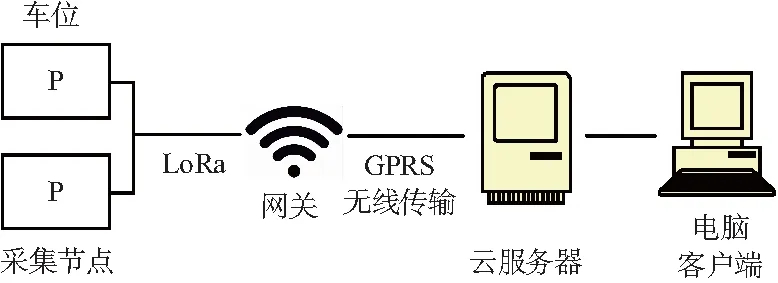
图1 系统结构
2 系统硬件设计
2.1 采集节点
采集节点完成对停车位状态及车辆身份信息的监测,将信息处理后经过LoRa通讯上传至网关。该节点由数据采集处理芯片、车位状态采集模块、车辆信息采集模块以及LoRa通信模块组成,如图2所示。
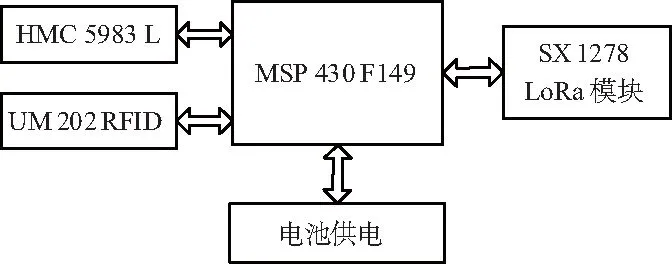
图2 采集节点硬件设计
2.1.1 数据采集处理芯片
数据采集处理芯片使用MSP430F149,它是一款16位超低功耗MCU,可有效降低功耗,一枚电池可维持10年寿命,满足了因埋在地下,维护次数少,需要功耗较低,能维持多年的要求。
2.1.2 车位状态采集模块
地磁传感器选用HMC5983三轴磁阻传感器,当车辆驶入或驶离停车位时,埋入停车位地下的地磁传感器感知到汽车金属底盘对地磁场的扰动,从而其X,Y,Z三个维度的磁力发生变化。本设计选用I2C通信方式,将传感器采集到的地磁场三轴上的分量发送至MCU,并设置阈值,判断数据是否逐渐减小且远离检测阈值,若是,则检测为有车辆可能驶离;进一步再判断数据是否小于检测阈值,若是,则检测结果为车位有车辆驶离;反之,检测结果为车位没有车辆驶离。
2.1.3 车辆信息采集模块
车辆信息采集选用UM202模块,RFID读卡器模块选用UM202超高频读卡模块,RFID读卡器模块通过RS232转TTL串口通讯与单片机相连接,初始化RFID读卡器模块,并设置连续读卡模式,同时设置合适的发射功率方便RFID天线工作(功率范围0~30 dbi)。RFID读卡器模块读取通过RFID天线检测到的电子标签信息,完成车辆信息采集。
2.1.4 LoRa通信模块
本部分采用无线串口模块ATK-LORA-01,使用AT指令传输[14]。MCU通过TTL串口与SX1278模块进行连接,根据停车位状态数据变化情况,实时向网关发送停车位占用/空闲状态以及车辆身份信息。
2.2 网关硬件设计
采集节点接收信息后,将信息发送给网关。LCD可实时显示信息,同时数据经过GPRS模块上传至服务器。该节点由STM32F407、SX1278LoRa模块、LCD和GPRS模块SIM800C组成,如图3所示。

图3 网关硬件设计
该节点选取STM32F407单片机为控制芯片,具有低电压和节能的优点。本系统利用I2C通信实现车辆信息数据传输。设计中的SIM800C模块,内置工业标准的TCP/IP协议,是一款尺寸紧凑的GSM/GPRS模块[15]。用户通过UART 串口发送AT指令集,初始化GPRS模块工作,等附着到GPRS网络之后,获取云端IP地址,使云端建立连接,完成车位状态及车辆信息向云端的传送。
3 系统软件设计
3.1 采集节点软件流程
采集部分使用睡眠-唤醒-睡眠的任务形式,每隔1 s采集一次车位信息,唤醒后检测停车位状态(即地磁模块HMC5983检测的数据的变化),若发生明显的变化,则启动RFID模块,检测停在该车位的车辆身份信息(即电子标签上存储的数据),然后数据发送至网关。软件流程如图4所示。
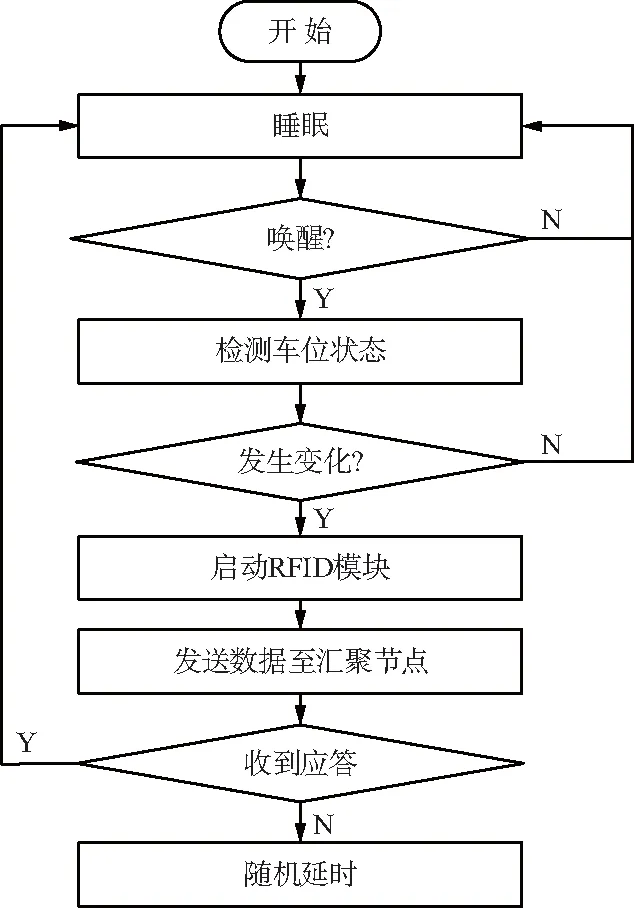
图4 采集节点软件设计流程
3.2 LoRa通信协议设计
LoRa通信协议设计LoRa模块采用ISM频段射频,并基于SX1278扩频芯片实现远距离数据传输,拥有透明传输、定向传输以及广播与数据监听模式。本文设计采用广播监听模式,由多个LoRa节点(对应不同车位)向一个汇聚节点LoRa模块发送数据,如图5所示。

图5 LoRa一对多传输
将图5中汇聚节点A的地址设置成0xFFFF,使之处在广播监听模式,节点B~F分别设置不同的地址,以此代表各个车位编号。以节点C为例,将设备C地址设置为0XAB00,信道设置为0X01,当设备C发送:AB 0001有车/无车AB00,如表1所示,汇聚节点A接收到数据:有车/无车AB00,其中,有车与无车状态根据地磁传感器测试的数据来判断,AB00代表发送这个数据节点的地址,不同地址对应不同的车位编号,最后汇聚节点A将B~F所有节点采集到的数据通过GPRS模块发送至服务器,由TCP/IP协议完成,供电脑端的管理人员进行数据处理。
表1 数据输出

发送目标地址信道地址车位状态自身地址AB1010有车/无车AB00
3.3 车辆管理显示平台
GPRS与云端建立连接后,Web网页端实现客户的远程登录,查询某一路段停车位的状态、在此车位上停车的车辆信息、同一辆车驶入与驶离的时间。网页端通过图表的形式实现车辆管理显示。为后续通过车辆管理平台实现停车场车位的监控、车辆缴费和停车告知提供便利。
Web网页开发采用B/S结构,用户工作界面由浏览器实现。使用HTML完成网页制作[16],并采用PHP技术实现网页与数据库的连接。通过添加多个超级链接点来实现登录界面的密码找回、新用户注册和搜索等功能,并对界面进行整体优化。用户在登陆后可轻易地实现车位查询、在线缴费的功能,而管理员登入端则会增加远程监控以及提示功能,同时,系统会将一段时间内的数据自动上传到云端,方便查看车位停放历史。
4 实验结果及分析
4.1 地磁检测车位
将HMC5983完全水平放置在停车位上,使Y轴正对于车辆驶入停车位的方向,Z轴垂直于水平面。测试车辆为SUV类型,每秒记录一次车辆从驶入到驶离车位时的三轴数据,得到曲线图如图6所示。实验结果显示,三轴数据均有变化,且Z轴变化最明显,检测范围是0.2 cm,阈值为2.5高斯,可以实时检测车位状态。

图6 地磁传感器数据曲线
4.2 RFID检测车辆身份
与现有摄像头图像识别技术对比,在雾天或光照较强的情况下,摄像头无法精准识别车牌,正常情况下的识别与雾天下的识别对比如图7所示,而RFID可以不受环境影响,较为准确地识别出车辆身份信息,如图8所示。

图7 摄像头识别车牌

图8 RFID识别车牌
4.3 与现有停车系统对比分析
实验结果表明,在对停车信息的检测方法上,相比于其他采用单一测试源的同类系统,本系统的方法更可靠。通过HMC5983地磁传感器Z轴数据变化能够检测到车位状态,配合RFID读卡器模块识别车辆的其他有效信息更能提高车辆的识别率,解决了当前停车管理系统易受天气、噪声等因素影响而无法准确识别车辆信息的问题,且RFID圆极化天线增大天线识别范围,能够有效克服汽车金属底盘对信号传输的干扰,有效检测到电子标签。通过对LoRa单跳通信距离的测试,其单跳通信距离远大于ZigBee、蓝牙等技术,完全满足了本系统对低功耗的需求。综上,与现有停车管理系统相比,本系统准确度高、功耗低且抗干扰能力强、通讯距离远,具有很大的优越性。
5 结束语
本文完成了基于LoRa的智慧停车管理平台的设计。通过将系统部署在停车场进行试验,验证了系统的可行性和实时性要求。地磁传感器与RFID的结合有效提高了车辆识别率,LoRa技术的应用也展现了低功耗的核心优势。与其他同类系统相比,本系统具有广阔的市场前景,未来还需对停车场中信号干扰问题做进一步研究,以便更好地提高停车管理系统的准确性。
猜你喜欢
计算机应用文摘·触控(2022年6期)2022-04-15
电子制作(2021年4期)2021-06-16
汽车画刊(2020年5期)2020-10-20
英语文摘(2020年7期)2020-09-21
祝您健康·文摘版(2020年3期)2020-04-09
环球时报(2019-07-24)2019-07-24
宇航计测技术(2018年3期)2018-09-08
现代家长(2018年11期)2018-01-05
汽车文摘(2017年9期)2017-12-06
读书文摘·经典(2017年8期)2017-08-09
