
一种基于形态滤波的水声信号检测算法
2019-06-25 09:54王晓庆母诗源王志欣
无线电工程 2019年7期
王晓庆,母诗源,李 晋,王志欣
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
0 引言
在被动声呐目标检测方面,传统方法主要通过空域的波束合成处理获得空间增益,通过时间上的积累获得时间增益。一般空间波束合成方法有常规波束形成(CBF)和MVDR等方法[1-6]。CBF方法的优点在于算法简单、计算量小,但其方位分辨能力较差,多个目标相互靠近时,相互干扰严重。MVDR方法属于自适应的波束形成方法,可以提高方位分辨率,但是在阵列导向矢量出现误差和阵元快拍次数小于阵元个数时,性能急剧下降;另外,上述传统方法并不能抑制水下复杂环境噪声在时间和空间上的非平稳性影响。
数学形态滤波[7]在图像处理中的应用已经较为广泛,是一种针对信号时域特征的非线性处理方法。随着对数学形态学理论的深入研究,相比于其他方法,在处理过程中可以保证幅度不畸变、相位不偏移,因而受到了越来越多的关注。数学形态滤波技术应用于水下目标检测时,有效地抑制非平稳色噪声,大大降低被动声呐的虚警概率。
导向最小方差波束形成(STMV)算法[8]充分利用宽带信号时宽—带宽乘积大的特性,当信源相干或者采样快拍数较少时,具有更好的统计特性,可增大对旁瓣的抑制效果,合成增益较传统方法高。
本文结合数学形态学滤波和STMV提出了一种新的水声目标信号检测方法。该方法在强干扰背景下,能有效检测目标的共振线谱。通过对海试试验采集的数据进行分析处理,并将其与常规处理方法CBF,MVDR进行对比,验证了算法的有效性。
1 STMV算法
水下被动声呐阵列探测原理如图1所示。STMV算法利用导向协方差矩阵,对不同频点的协方差矩阵进行相干积累,获得了宽带增益并能够处理相干源。
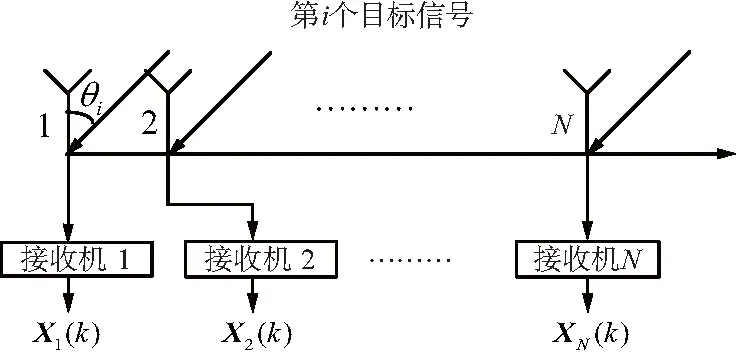
图1 水下被动声呐阵列探测原理
其基本原理如下:
设有K个宽带信号si(t)(i=1,2,...,K)以来波方向θi入射至N元矢量水听器阵列,则阵列第l个阵元的输出可表示为:
(1)
式中,τi为第i个宽带信号在相邻阵元之间的传播时延;Nl(k)为噪声矢量。在观察时间长度T内,对阵列输出数据进行离散傅里叶变换,根据前述Xω的形式,可得Xω中对应频率ω的频域快拍为:
(2)
式中,a(θ,ω)为对应频率ω的阵列导向矢量;s(ω)为信号的离散傅里叶变换;N(ω)为噪声的离散傅里叶变换。
根据宽带阵列信号数学模型,将式(2)改写为矩阵形式,可得:
Xω(ω)=A(ω)S(ω)+N(ω),
(3)
式中,A(ω)=[a(θ1,ω)a(θ2,ω) ...a(θK,ω)]为矢量a(θ,ω)组成的矩阵;S(ω)=[S1(ω)S2(ω) ...SK(ω)]T为信号的频域矩阵;N(ω)为噪声矢量。
对于CBF,通过对相应阵元进行延时补偿,可增强对期望方向信号的响应,CBF的延时补偿实现方式为:
(4)

(5)
式中,τ为对应期望方向θ的单位延时,有:
(6)
式中,d为阵元间距;c为波速。由X(k,θ)表示的CBF输出为:
y(k,θ)=WHX(k,θ),
(7)
式中,W=[1 1 ... 1]T为固定加权矢量。由上述导向传感器输出X(k,θ),可定义导向协方差矩阵(STCM)RSTCM为:
RSTCM(θ)=E[X(k,θ)XH(k,θ)],
(8)
式中,X(k,θ)为导向传感器输出。将导向输出X(k,θ)在频域展开,可得:
(9)
式中,矩阵T(ω,θ)具有与导向矢量相同的作用,有:
T(ω,θ)=diag(1 e-jωτ... e-jω(N-1)τ)。
(10)
当观察时间T大于信号和噪声的相关时间时,不同频率间的傅里叶系数相互正交,结合式(10),STCM矩阵可表示为:
(11)
(12)
根据输出最小方差原理,可知宽带波束合成最优权与MVDR最优权Wopt相同的形式,其空间谱估计式也相同,由Capon空间谱估计式可知,STMV的空间谱估计式为:
(13)
式中,W=[1 1 ... 1]T为固定加权矢量;RW-STCM(θ)为引导方向θ的加权指向协方差矩阵。频域快拍的协方差矩阵Rx(ω)为:
(14)
实际情况中,参考采样协方差矩阵求逆(SMI)中的协方差矩阵构造方法,则Rx(ω)的最大似然估计为:
(15)
式中,Xωi(ω)为第i个观察时间段内对应频率ω的频域快拍。则实际应用中的STMV形成的空间谱估计式为:
(16)

2 信号层形态学滤波基本原理
数学形态学[9-12]是一种非线性图像(信号)处理和分析工具,具有一套完整的理论、方法和算法体系。它采用一套独特的变换或运算来描述图像的基本特征或基本结构,即图像中各像素或各部分之间的几何关系。
基于数学形态学理论,形态学滤波提供了一种基于形状的非线性变换理论和方法,在数字信号处理中有重要的作用。该理论运用结构元素修改信号局部特征,得到信号更本质的形态。其一维离散情况下的多值形态变换,对信号频谱中的峰值(正脉冲)噪声、低谷(负脉冲)噪声以及白噪声有很好的抑制效果。
设信号f为定义在F={0,1,...,N-1}上的离散函数,结构元素b为B={0,1,...,M-1}上的离散函数,且有N>M,则4种基本的一维形态变换定义为:
f(x)关于b的膨胀:

n=0,1,...,N-M。
(17)
f(x)关于b的腐蚀:

n=0,1,...,N-M。
(18)
如果对信号的频谱图作一维灰度形态学运算,则膨胀算子会减小信号频谱的谷值,扩展峰顶;而腐蚀算子则会减小信号的谱峰,加宽谷域,即:腐蚀算子为最小值滤波器,可以获得数据的下包络;膨胀算子为最大值滤波器,可以获得数据的上包络。
根据式(17)和式(18),f关于b的开运算和闭运算分别为:
(19)
开运算是非扩张的,小于结构元素的部分会被“开掉”,所以开运算可以抑制信号的尖峰,如突发、毛刺等;闭运算是扩张的,小于结构元素的部分会被膨胀填充,所以闭运算可以抑制信号的波谷。开、闭运算所能滤除的正、负脉冲宽度取决于运算所使用的结构元素b的宽度M,选取大于噪声宽度的结构元素,可以利用开、闭运算去除信号中的噪声。上述基本运算的不同组合构成的滤波器可滤除不同类型的噪声,实现信号平滑处理。
如图2所示,本文使用如下开闭运算组合[13-17]:

(20)
该方法对信号频谱分别进行联合开闭运算和闭开运算,并将运算结果做平均,最后将平均的结果再进行1~2次的开运算,这样经过多次形态学处理和平均后,得到的结果会很好地反映信号的底部噪声电平,再用原信号频谱减去测算出的噪声基底,得到的信号基底会基本平坦,很大程度上避免了由于色噪声干扰和信号频谱起伏对信号检测造成的影响。
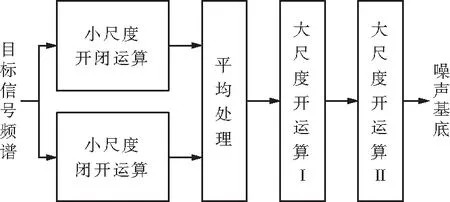
图2 基于数学形态学滤波的处理流程
3 本文提出的方法
本文结合数学形态学滤波和STMV形成提出了一种新的水声目标检测方法,水声阵列采集数据首先经过信号预处理后进行频域的波束形成处理(使用频域STMV算法),获取空间上的增益。接着,使用Welch谱估计减弱信道衰落对变换造成的影响,获取时间上的处理增益。之后,使用形态滤波及白化处理消除色噪声干扰和信号频谱的起伏。最后,使用高斯白噪声门限检测方法,完成对目标信号的检测。
本文所提方法的水下目标检测流程如图3所示。具体步骤如下:
① 对水声阵列采集数据进行预处理,主要包括:去直流、复频域变换和带通滤波,得到N路滤波后的时域数据;
② 将滤波后的时域数据进行滑动窗FFT变换,从而将信号变换到频域,方便后续处理;
③ 对频域数据进行波束扫描,扫描方法采用STMV算法;
④ 对波束扫描结果进行平均周期图时间积累(Welch谱估计),输出LOFAR估计结果;
⑤ 对平均周期图输出结果进行数学形态滤波,从而精确估计出信号频谱的噪声基底;
⑥ 利用得到噪声基底对目标信号进行白化处理,消除信号的杂散点和毛刺;
⑦ 白化处理后的信号可以近似看作处于高斯白噪声环境,可以利用高斯白噪声环境下的门限估计和信号检测理论进行处理,得到目标检测结果。
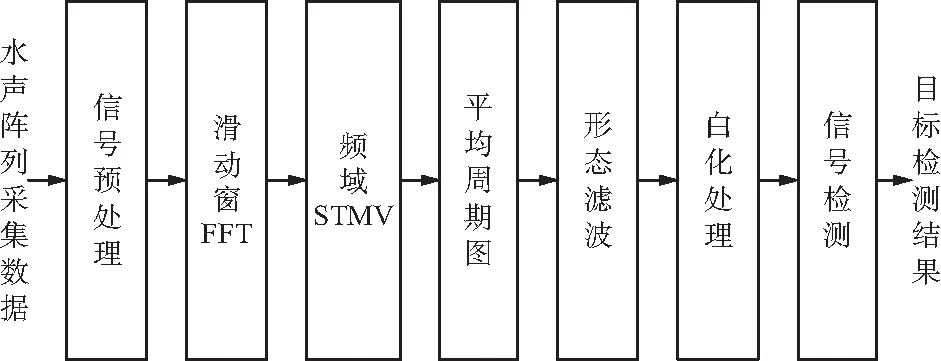
图3 本文所提方法的水下目标检测流程
4 海试数据验证与分析
使用本文检测算法进行海试试验,使用模拟声源模拟水下目标,采集相关试验数据进行处理,验证本文检测算法的效果。某时间段用常规方法处理得到的方位历程图如图4所示。采用本文基于形态学滤波的STMV方法如图5所示。

图4 常规CBF方法处理的方位历程图(拖船航速8节)

图5 基于形态学滤波的STMV方法处理的方位历程图(拖船航速8节)
该数据中含有一个目标和拖船自噪声强干扰。目标的初始方位为110°,拖船自噪声干扰在10°~35°的方位范围内,拖船航速为8节。目标由于距离拖曳阵声呐较远,CBF处理的背景噪声虽然平滑,但是不能消除拖船自噪声的影响,目标探测效果较差,并且背景噪声也存在非常多的毛刺,不均匀。
CBF方法处理的方位历程图如图6所示,在另一个时间段,目标初始方位为78°,拖船航速12节,拖船自噪声干扰在20°~40°的方位范围内非常强,常规方法的方位历程轨迹被近场的拖船自噪声强干扰淹没。而采用本文基于形态学滤波的STMV方法如图7所示,无论拖船是8节航速还是12节航速,都能很好地抑制拖船自噪声并且清晰地呈现出目标的方位历程,且能量集中,背景噪声也仅有少量残留。
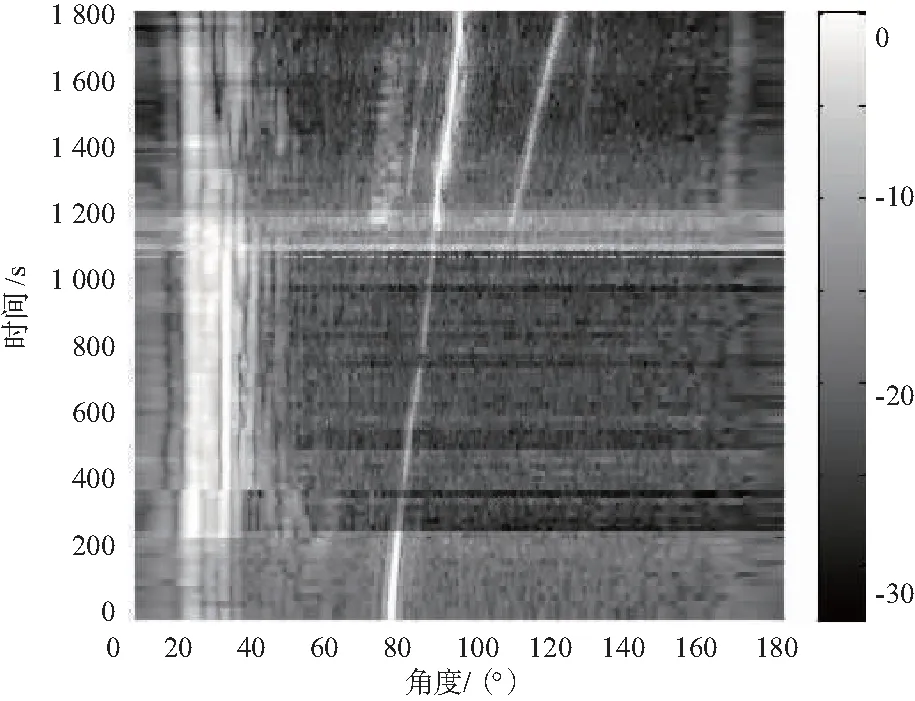
图6 CBF方法处理的方位历程图(拖船航速12节)
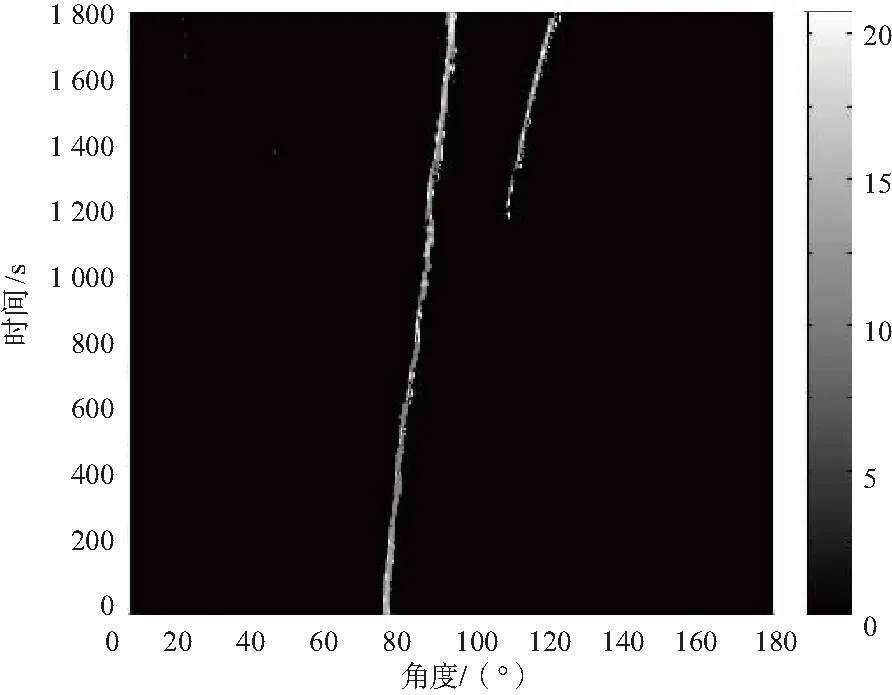
图7 基于形态学滤波的STMV方法处理的方位历程图(拖船航速12节)
对STMV波束形成输出的时域信号进行进一步目标线谱检测。第1个时间段,拖船航速8节。STMV波束形成输出的时域信号经过Welch谱估计和形态滤波处理后,色噪声基底被有效地转化为平坦的高斯白噪声基底,从而成功检测出线谱频率。第2个时间段,拖船航速12节。从STMV波束形成输出可以看到,形态滤波处理前的信号完全淹没在色噪声背景下,经过形态滤波和白化处理的目标频谱,CW信号相对于噪底增益提高了约20 dB,从而可以成功地使用常规门限检测方法对目标进行检测。形态滤波前后STMV输出信号检测结果如图8和图9所示。
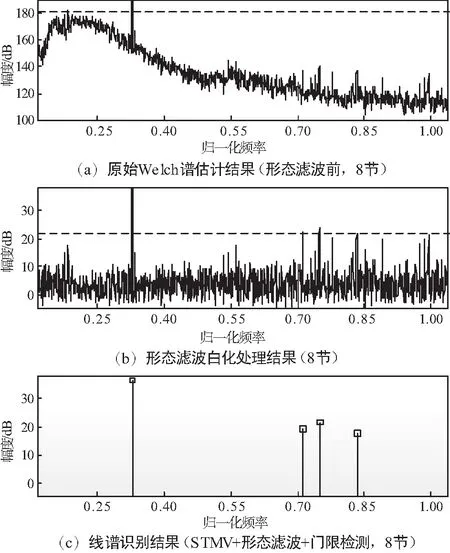
图8 形态滤波前后STMV输出信号检测结果(拖船航速8节)
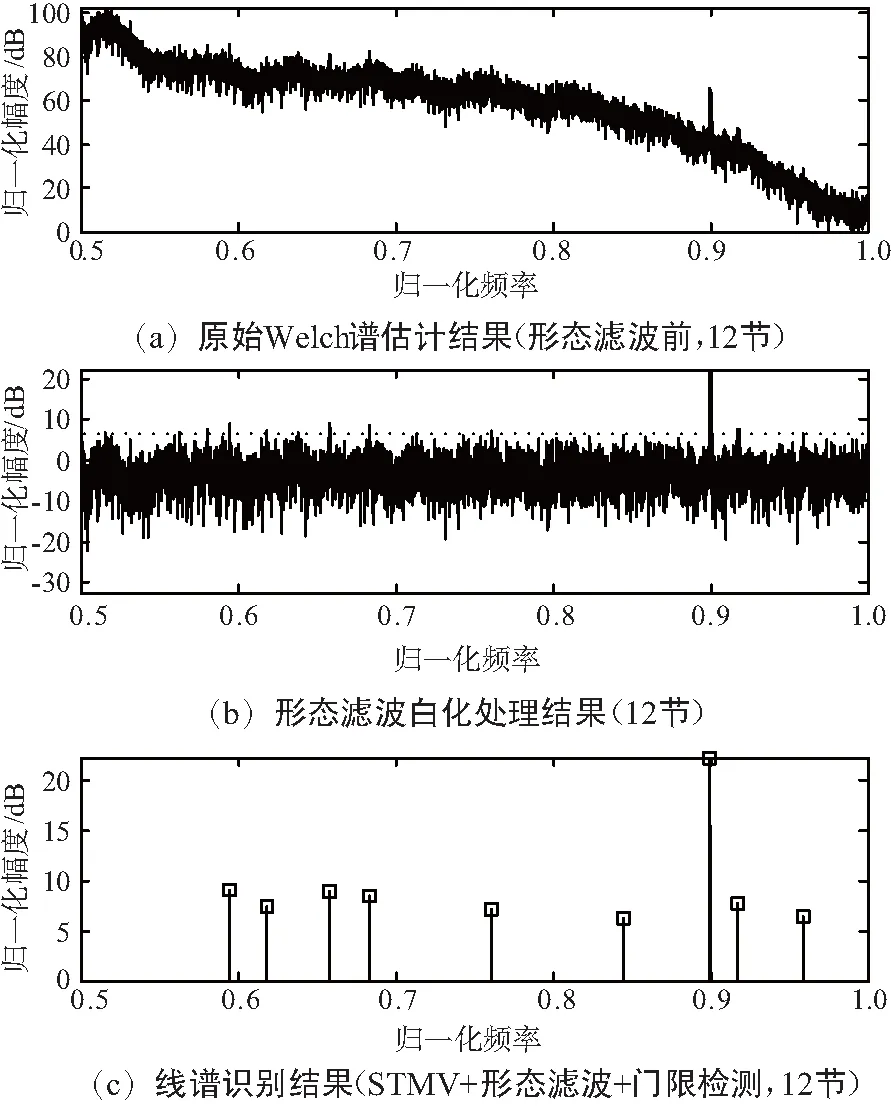
图9 形态滤波前后STMV输出信号检测结果(拖船航速12节)
5 结束语
本文深入研究了水声目标检测中色噪声及近场强干扰影响目标检测概率的问题,使用在宽带情况下旁瓣抑制能力强的波束形成算法,提出了一种联合导向最小方差波束形成和形态滤波的水声目标检测方法,形成了一套新的水声信号检测流程。该方法能够在保证较高的信号检测概率的前提下大幅降低检测算法的虚警概率。通过对海试数据进行处理证明,本文提出的方法有更强的凸显信号和抑制噪声的能力。后续工作可在分裂阵处理[18]的基础上结合数学形态滤波实现水下目标的高分辨检测和测向。
猜你喜欢
上海船舶运输科学研究所学报(2022年3期)2022-08-05
信息通信技术(2022年2期)2022-05-31
中国药学药品知识仓库(2022年9期)2022-05-23
齐鲁艺苑(2022年1期)2022-04-19
昆明医科大学学报(2021年12期)2021-12-30
成都信息工程大学学报(2021年6期)2021-02-12
数字海洋与水下攻防(2020年6期)2020-12-25
珠江水运(2020年21期)2020-12-01
珠江水运(2020年16期)2020-09-16
舰船科学技术(2020年3期)2020-04-22
