
HFDL信号的检测与参数提取方法
2019-06-25 09:54陈丽
无线电工程 2019年7期
陈 丽
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
0 引言
HFDL也被称为短波飞机通信寻址和报告系统(ACARS),是飞机和地面站通过无线电传递信息的数据通信系统[1],利用短波信道通过其覆盖范围的多个地面站实现对民航飞机的监控。该系统在航空系统中获得了广泛应用,是航空公司识别、监控飞行安全和数据传输的重要手段[2]。
在短波信道中,电离层参数不稳定,信号传输过程中产生的衰落,多径传播引起的时间色散,多普勒效应引起的频率色散等[3-4],多种因素使得在低信噪比时,传统时频域能量检测方法的检测准确率大大降低。本文在分析了HFDL协议特征基础上,利用信号的协议特征完成对信号的高效检测,并对信号频偏等参数进行精确估计与提取。
1 信号波形分析
1.1 数据传输格式
HFDL协议是一种时分多址(TDMA)协议系统,每帧信号持续32 s,分为 13个时隙,TDMA时隙结构如图1(a)所示。
第一个时隙称为Squitter,它承载了时隙确认和任务编码等多种信息。其余12个时隙称为介质访问协议数据单元(MPDU),用于飞机和地面站交换多种信息数据,如飞机起降请求、飞机位置信息和频率分配[6]等。每个MPDU包含多个链路协议数据单元(LPDU)。
每个时隙具有相同的结构,如图1(b)所示。
HFDL信号是调制在单边带载频上的MPSK信号,符号速率为1 800 sps,调制样式包括BPSK,QPSK,8PSK,数据速率包括300,600,1 200,1 800 bps等4种[6]。
频率为1 440 Hz的单音信号持续约249 ms。这段单音在信号接收过程中使自动增益控制达到稳定。
同步前导段持续295 ms,调制方式为BPSK,同步前导序列由A,A,M1,M2,T等序列顺序组成。前导部分用于时隙同步,并用于消除短波通信信道传输中产生的衰落等。
数据段持续时间为1.8 s(单一时隙)或4.2 s(双时隙),该段由数据与探测对构成,每对包含30个MPSK用户数据符号和15个已知信息的BPSK同步符号。
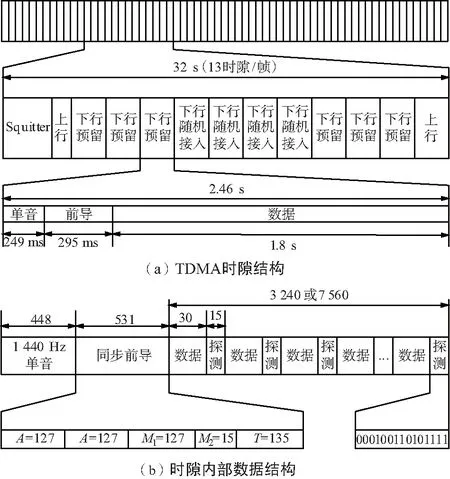
图1 TDMA时隙结构
1.2 同步前导序列
由于对信号的同步检测采用基于部分已知同步前导序列的方法,并从中提取后续处理所需的部分信号参数,因此下面重点对同步前导序列进行描述:
同步前导序列由A,A,M1,M2,T序列顺序组成,其中:
A= 010 1101 1101 1110 0011 1010 0010 1011 1000 0001 1110 1100 1100 0100 1001 1100 1111 1001 0000 0100 0110 1010 1011 0100 1010 0001 0110 0001 1001 0111 1111;
M1=8种以下序列移位的一种:
011 1011 0111 1010 0010 1100 1011 1110 0010 0000 0110 0110 1100 0111 0011 1010 1110 0001 0011 0000 0101 0101 1010 0100 1010 0111 1001 0001 1010 1000 0111 1111;
M2=移位后M1序列的前15个符号;
T= 000 100 110 101 111重复9次。
后续信号处理过程中,使用2组A段序列进行信号起始检测,对M1,M2两段未知序列进行均衡解调处理,提取M1序列移位个数等参数,推导得到该时隙信号的数据速率、交织参数及数据段调制样式等,使用T段序列进行均衡器训练,以便后续对数据块处理的快速收敛。
2 滑动相关信号检测方法
同步前导序列中包含2段已知确定序列,即连续的2段A序列,共254 bit,可以采用基于已知序列的信号检测方法,常常借鉴扩频信号检测的方法,即相关检测,该方法具有良好的效果[7-8]。
设发送载频为fc,初始相位为φc,接收端载频为f1,初始相位为φ1,c(t)是幅度为±1的伪随机序列,不考虑噪声和脉冲成形滤波器的影响,则接收信号可表示为:
s(t)=c(t)cos(2πfct+φc)。
(1)
按照符号速进行抽取后I,Q两路的输出分别为:
s(t)cos(2πf1t+φ1)=c(t)cos(2πfct+φc)cos(2πf1t+φ1)=
cos(2π(fc-f0)t+(φc-φ0))],
(2)
s(t)sin(2πf1t+φ1)=c(t)cos(2πfct+φc)sin(2πf1t+φ1)=
sin(2π(fc-f0)t+(φc-φ0))]。
(3)
因此,经过变频滤波后输出的基带信息分别为:
XI(t)=cos(2π(fc-f0)t+(φc-φ0))],
(4)
XQ(t)=sin(2π(fc-f0)t+(φc-φ0))]。
(5)
通过对以上公式进行分析可知,当无频差时,相关值不断累加达到最大值,形成相关峰值;当存在频差时,它随频差的增大而减小,甚至可能由于正负值的互相抵消而为零,相关累加后输出无相关峰,也就无法完成信号捕获。当接收序列与本地同步报头序列存在频差时,相关峰值会受到影响[9-11]。
因此,采用滑动相关后再进行FFT处理,具体处理为将本地同步报头进行BPSK调制,与接收序列进行滑动相关后进行FFT变换,当结果出现峰值并大于某一个设定的门限时,认为此信号是HFDL信号。
滑动相关FFT方法的处理流程如图2所示。

图2 滑动相关FFT处理流程
将经过相干解调与低通滤波后的信号与本地同步信号对应相乘,当接收信号与本地信号完全同步时,相乘后的信号可以看成是混有噪声的单音信号,信号频率即为系统的频差。单音信号是窄带信号,经过FFT变换后其功率谱中会出现峰值[12-13]。在滑动相关过程中,当接收信号与本地信号没有同步时,相乘后的信号不是单音信号,FFT变换后其功率谱中的相应位置不会出现明显的峰值。因此,当功率谱中的相应位置出现明显峰值时,可以认为已经捕获到了信号[14]。
3 信号参数提取
3.1 频偏估计
通过进行频偏估计,可以得到基带剩余的载频,去除剩余载频后,有利于后续解调环路快速锁定。
首先进行初始频偏估计,当完成初始同步以后,从初始同步位置处将接收信号与本地信号对应共轭相乘并做FFT变换,此时在功率谱中得到最大峰值,计算峰值点对应的频率即为接收信号的初始频偏[15-16]。
计算得到的频率估计值为:
(6)
式中,fs为采样频率;N为FFT点数;npeak为频谱峰值对应的采样点数。计算FFT的同时,对数据进行加窗处理,使信号的频谱发生扩散,频谱估计精度受N值大小的限制,不能得到信号频谱的真正峰值频率。因此,需要进一步计算较精细的频偏[17-18]。精细频偏的计算通过CZT算法来实现。
CZT定义如下:对已知的时间序列{x(n),0≤n≤N-1},其Z变换为:
(7)
令Z的取值样点Zk=AW-k,得到:
(8)
当满足一些特殊条件,即:
(9)
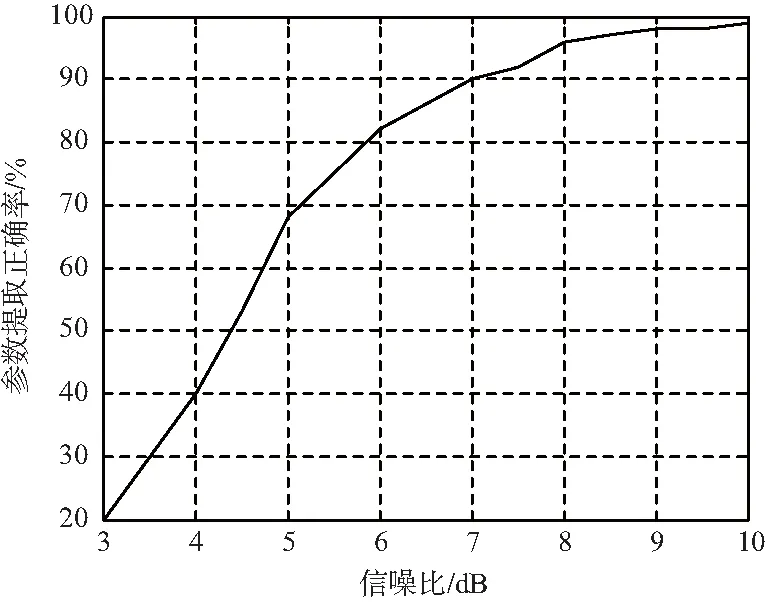
式中,Zk是均匀等角度分布于单位圆上的情况,即为该序列的DFT。当M 该算法可以在限定的频率范围内计算,比全谱计算的FFT效率更高,比频谱峰值位置的方法计算精度更高,因此,可用于对频率粗估计后的精确估计。 对信号完成初始捕获、频偏估计,消除载波剩余频偏后,根据协议中同步前导序列格式,可对前导序列进行均衡解调,通过解调获取解调后的M1序列,与标准序列进行相关比对,选定该时隙数据属于8种移位方式中的一种,从而确定该时隙中数据块参数,如信息传输速率、信号调制样式和交织参数等。 M1与数据速率、调制样式和交织参数的对应关系如表1所示。 表1 信号参数对应表 数据速率/bps交织/sM1移位个数调制样式3001.872BPSK6001.882BPSK1 2001.8113QPSK1 8001.81238PSK3004.261BPSK6004.2103BPSK1 2004.293QPSK1 8004.298PSK 在实际应用中,使用短波天线与接收机对HFDL实际信号进行采样,随后对采样信号进行定时同步处理,使得每个符号对应一个采样值。利用同步序列的前254个序列做滑动相关FFT来检测同步序列,从而实现同步捕获。 处理中将接收信号与本地信号对应共轭相乘并做FFT变换,将最大模值作为当前对齐位置对应的相关值,与当前信号做完相关FFT后,寻找码元对齐位置,实现捕获的条件是相关值中出现明显峰值,并且峰值与此时平均值之比大于门限值。利用该方法得到的信号捕获结果如图3所示。 图3 滑动相关FFT捕获结果 由图3中可知,该信号A段起始位置为第951个符号采样点,当后续进行解调均衡器训练时从该位置进行数据选取。 载频估计如图4所示。其中,频偏粗估计如图4(a)所示。 图4 载频估计 根据前期提供的M1段解调起始位置提取M1段采样数据,并对信号进行均衡解调,由于在A段的解调处理中,已去除相位模糊,因此对M段解调结果进行BPSK星座映射后,将得到待比对的比特数据流。 将待比对的M1段序列分别与8种移位后的标准M1序列进行异或运算,得到结果如图5(a)所示。结果表明,该实际采集的某一时隙内数据与表1中第1种参数组合相对应,即数据速率为300 bps,交织长度为1.8 s,调制样式为BPSK。通过后续对数据段数据的解调译码及解析结果,如图5(b)所示,可以验证参数提取的正确性。 图5 信息参数提取及结果 在算法实现过程中,信号检测与频偏的粗略估计主要涉及FFT运算,频偏的精确估计CZT算法主要使用点乘运算,在工程实际中均可使用优化并封装好的库函数模块进行运算,以提高处理效率。 在VPX的硬件板卡上对多组实际采集信号进行处理,按照顺序执行信号检测、频偏估计及信号参数提取的方法进行测试,总平均处理时间约为41.76 ms,而同步前导块中A+A+M1块的持续时间为211.67 ms,因此处理速率完全能够满足实时性处理需求。 多组实际采集样本进行性能仿真测试,获得了不同信噪比条件下信号参数提取的性能曲线,结果如图6所示。 图6 参数提取结果 由结果可知,在信噪比约为6 dB时,参数提取的正确性能够达到80%以上,能够满足对实际信号的应用需求。 针对HFDL信号的格式与特点,设计了基于协议的HFDL检测与参数提取方法,采用基于滑动相关的FFT检测方法实现信号起始位置的精确捕获,采用FFT频偏粗测结合CZT频偏精细测量的方法,对剩余的频率偏差进行补偿,通过使用相关比对法实现信号信息速率与交织大小的参数提取。通过对实际信号的采集,对一段时间内的信号进行处理,验证了该算法可以完全适应短波信道的恶劣环境,实现对目标信号的有效检测与参数提取等处理。该处理算法已经在VPX平台与计算机平台上进行了应用,具有较高的推广价值。3.2 信息速率与交织参数提取

4 仿真与应用
4.1 信号检测

4.2 频偏估计


4.3 参数提取

4.4 工程实现
5 结束语
猜你喜欢
钢管(2022年2期)2022-11-28
新教育时代·学生版(2020年10期)2020-07-31
舰船电子对抗(2020年2期)2020-06-23
福建基础教育研究(2020年1期)2020-05-28
电子制作(2019年10期)2019-06-17
经济研究导刊(2018年26期)2018-11-14
科学与技术(2018年23期)2018-06-17
意林(绘英语)(2018年1期)2018-04-28
中兴通讯技术(2017年1期)2017-03-11
山东工业技术(2016年5期)2016-03-04
