
黑麋峰抽水蓄能电站机组振摆保护逻辑优化
2019-09-02 02:26陈福球陈玉娇
水电站机电技术 2019年8期
陈福球,汤 巍,陈玉娇
(湖南黑麋峰抽水蓄能有限公司,湖南 长沙410213)
1 设备现状
1.1 系统简介
黑麋峰公司机组振摆在线监测系统由上位机与下位机两部分组成,制造厂家均为南京南瑞集团。每台机组安装1套下位机即现地振摆监测装置,下位机系统主要包括:现地预处理机SJ90B、传感器、交直流逆变电源系统、触摸显示屏,主要功能为实时处理、显示传感器过来的振摆数据,经分析处理后送往上位机,并通过逻辑判断,出口振摆报警、跳机信号等。振摆监测系统上位机共安装1套,型号为SSJ-9000,主要包括:WEB服务器(及软件)、数据库服务器(及软件)、状态监测分析软件、报告编制系统、交直流逆变电源系统、触摸显示屏、交换机、安全防护装置,主要功能为数据存储与分析、报表统计、图谱分析、事故追忆等。
1.2 现地振摆监测装置测点
黑麋峰公司机组振摆在线监测系统每台机组配置21个测点,分别为振动10个,摆度6个,键相1个,大轴位移3个,压力脉动1个。机组传感器测点见表1。
现地振摆监测装置测点除现地传感器过来的模拟量外,还有从监控系统输入的通信量,如表2所示。
1.3 机组振摆数据统计及主要问题
1.3.1 机组振摆数据统计
2015年6、7 、8月份机组振摆数据统计如表3、表4、表5所示。

表1 机组传感器测点清单表
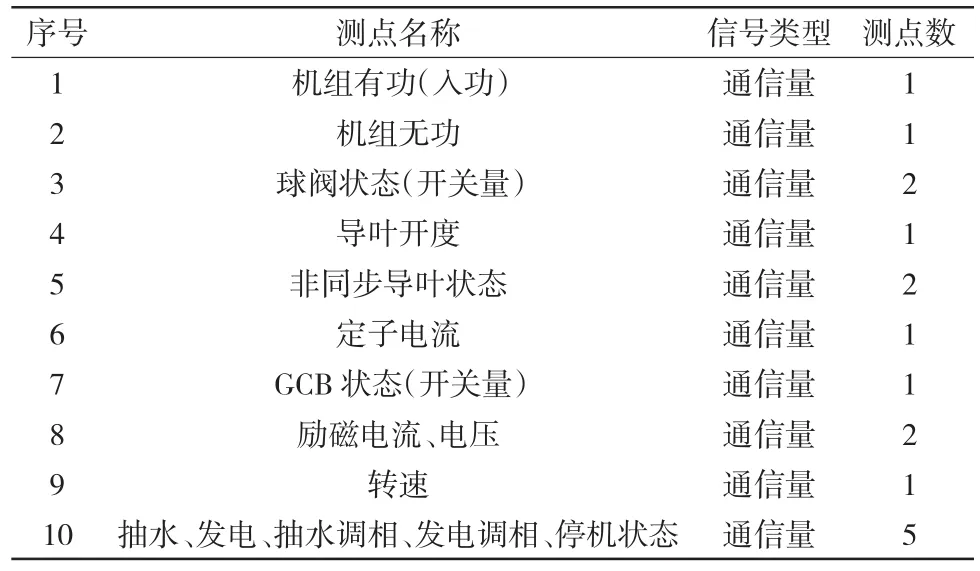
表2 监控送至机组状态在线监测装置点表

表3 2015年6月份机组振摆数据 单位:μm
1.3.2 国标中关于振动、摆度数据的评价标准
GB/T 11348.5-2008旋转机械转轴径向振动的测量和评定第5部分:水力发电厂和泵站机组,该标准将水轮发电机组在稳态运行时的转轴相对振动划分成两个主要范围:
1)大区A-B:振动值在此大区内的机组可以长期运行;
2)大区C-D:振动值在此大区内的机组具有较高的振幅,必须考虑机组具体的设计和运行条件,判断振动值是否允许长期连续运行。
按照标准要求报警值推荐设置大区A-B上限的1.25倍。一般报警后,机组还可以继续运行一段时间,以便查明振动改变的原因并确定补救措施。黑麋峰公司机组转速为300r/min,按照该标准黑麋峰水轮发电机组在稳态运行时的轴系摆度大区A-B的上限为242μm。

表4 2015年7月份机组振摆数据 单位:μm
因此,根据国家标准,黑麋峰机组摆度运行值不得大于大区A-B上限的1.25倍即302μm。
(2)机组振动评价标准
花样游泳所展现的技巧和美感,大致上和花样滑冰、自由体操及芭蕾舞相同。但是花样游泳的多数动作,是在水中脚上头下进行的,有时一个动作需屏气达五十秒之久,就力度和动作控制来说,难度远比花样滑冰等还大一些。
1)顶盖振动
GB/T 15468-2006水轮机基本技术条件规定,额定转速在250~375r/min,其顶盖水平振动小于50μm;顶盖垂直振动小于60μm。

表5 2015年8月份机组振摆数据 单位:μm
根据国家标准,黑麋峰公司机组顶盖运行报警值:水平振动50μm;垂直振动60μm。
2)机架、定子铁心振动
GB/T 8564-2003水轮发电机组安装技术规范规定机组稳定运行范围内,额定转速在250~375r/min,带推力轴承支架的垂直振动小于50μm;带导轴承支架的水平振动小于70μm;定子铁心部位机座水平振动小于20μm;定子铁心振动(100Hz的允许双振幅值)不大于30μm。
根据国家标准,黑麋峰公司机组机架运行报警值:垂直振动50μm,水平振动70μm;定子基座运行报警值:水平振动20μm;定子铁心运行报警值:100Hz的允许双幅振动值不大于30μm。
根据国家标准,综合分析得出黑麋峰公司机组稳定性限值如表6所示。
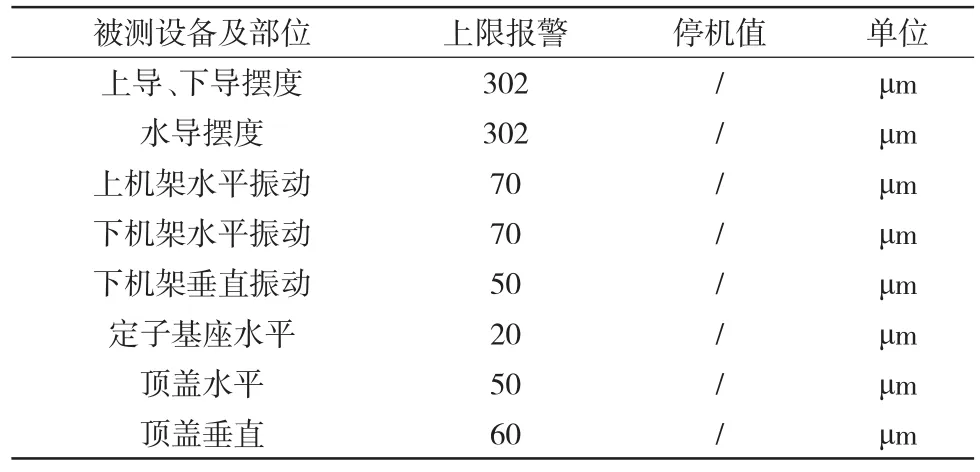
表6 黑麋峰公司机组运行参数限值
1.3.3 振摆数据存在问题分析
(1)大轴摆度数据分析
据数据统计分析,黑麋峰公司机组大轴摆度基本符合机组运行限制要求,变化趋势稳定,未见明显异常。
(2)机组振动数据分析
1)4台机组顶盖振动普遍超过国家标准限值50μm,且幅值超出标准好几倍,机组稳态运行时,4台机组顶盖振动值在100~300μm间浮动,偶尔跳动至350μm左右。其他部位振动数值基本符合国标要求。
2)振动探头采用的是国产精信品牌,产品质量一般,稳定性不高,3号机组2015年检修时,对振动探头进行送检时发现有5个探头故障,由于振动探头可靠性低的原因,故统计的振动数据可能与实际存在一定偏差。
1.3.4 当前振摆告警、保护动作逻辑
每台机组现地振摆监测装置设置一级报警与二级报警,均为开关量送往监控系统,一级报警作用于告警,二级报警通过装置内部逻辑判断后出口机组跳机信号,作用于停机。目前机组振摆保护尚未投入,故一级与二级报警值设置均较宽松,一级报警值为300μm,二级报警值为1000μm。
一级报警逻辑为单点延时告警,即任意一个振摆监测点数值超过300μm后,延时60s发告警信号,二级报警通过内部逻辑组态,然后延时输出跳机信号,且目前一级、二级报警只在停机、发电、抽水、发电调相、抽水调相这5个稳态激活,其他过渡工况不触发报警。二级报警逻辑组态流程见图1~3。
图2为抽水工况报警流程,其他4个稳态与抽水工况流程一样,即判断19个振摆监测点。
如图3所示,当前二级报警跳机出口逻辑为所有19个振摆监测点数值均超过二级报警值,然后延时60s,驱动跳机继电器K31、K32动作,将跳机信号送往监控系统。

图2 抽水工况报警流程
2 优化方案
(1)结合黑麋峰机组实际情况与振摆国标参考值,建议黑麋峰机组振摆一级、二级报警值暂如表7所示。
(2)对一级报警与二级报警逻辑优化如下
1)一级报警在过渡工况下(即机组不在发电、抽水、发电调相、抽水调相这4个稳态时)触发,延时60s出口报警,在稳态时触发,延时5s出口报警。
2)二级报警只在稳态下触发,通过逻辑组合后出口跳机程序,无报警,在过渡工况不激活跳机流程,同时,定子基座不设置二级报警值。在4个稳态时,跳机逻辑组态如下:
①如果上导摆度与上机架振动数值均触发二级报警,则延时60s后出口跳机信号。
②如果下导摆度与下机架振动数值均触发二级报警,则延时60s后出口跳机信号。
③如果水导摆度与顶盖振动数值均触发二级报警,则延时60s后出口跳机信号。
④如果大轴位移3个监测点数值均触发二级报警,则延时60s后出口跳机信号。

图3 二级报警跳机出口逻辑

表7 报警值建议表
3 预期达到的效果
通过梳理黑麋峰机组振摆监测系统当前运行情况及保护逻辑,提出符合黑麋峰机组实际的振摆逻辑优化方案,并根据最终优化方案投入黑麋峰机组振摆保护,提升机组的安全稳定运行监测水平。
猜你喜欢
大电机技术(2022年3期)2022-08-06
大电机技术(2022年2期)2022-06-05
中国农村水利水电(2022年2期)2022-02-23
核科学与工程(2021年4期)2022-01-12
煤气与热力(2021年4期)2021-06-09
水电与抽水蓄能(2021年2期)2021-05-14
自动化仪表(2020年10期)2020-11-13
水电站机电技术(2020年6期)2020-07-01
中华戏曲(2020年1期)2020-02-12
电子制作(2019年14期)2019-08-20
