
应用馈能悬架的HEV能量管理研究和燃油经济性分析
2019-09-04 06:21潘广香卢淑群马其江
阜阳师范大学学报(自然科学版) 2019年3期
夏 秋,潘广香,卢淑群,马其江,冯 霞
(滁州学院 机械与电气工程学院,安徽 滁州 239000)
HEV(hybrid electric vehicle)兼具传统燃油汽车和电动汽车优点,具有动力强和续航里程长排放低的特点[1-2],因此成为近年来的研究热点。HEV由多个动力源的能量耦合输出驱动,必须精确控制其输出扭矩,避免发动机长时间高速运转,达到降低油耗的目的[3]。此外,HEV中广泛应用制动能量回收系统,进一步降低了混合动力汽车的燃油消耗[4-5]。然而,混合动力汽车中燃油能量仅有25%~40%被有效利用。因此,车辆还有很大的节能潜力。
主动悬架技术能够改善车辆乘坐舒适性和行驶安全性等方面的动态性能[6-8],其振动能量也具有很大的回收和重复利用价值。而主动悬架为耗能部件,会降低车辆燃油经济性。为了降低引入主动悬架对车辆燃油经济性的影响,本文提出在HEV上引入馈能主动悬架技术,改善乘坐舒适性的同时保持HEV车辆的燃油经济性。已有学者对悬架振动能量回收性能做了相关研究,并提出了多种的能量回收机制和控制策略以改善悬架动力学性能和实现能量回收。张进秋[9]等人研究表明利用收集悬架振动能量,最大降低了10%的燃油消耗。使用控制策略不同主动悬架能耗水平差别很大。于长淼[10-11]等人通过优化控制参数,再生振动能量能够完全满足悬架主动控制需要,不额外消耗能量。然而,相比于传统汽车,在混合动力汽车上应用主动馈能悬架可以使用车辆本身电源不需要额外增加电池组,因而混合动力汽车能够充分发挥主动悬架的能量再生能力,将悬架振动能量转换为电能,降低混合动力汽车的燃油消耗。
对混合动力汽车能量流控制已提出了多种能量管理策略[12-15],而馈能悬架技术的引入,打破了车辆能量流的平衡,因此必须重新设计现有的能量管理策略。根据国内外研究现状可知,较少提及在混合动力汽车中引入馈能主动悬架技术。Montazeri-Gl[16]等人研究了主动悬架技术在功率分流式混合动力汽车中应用,但缺乏对燃油经济性的研究。此外,还需要对主动悬架能量回收能力和动力学性能综合系统的研究[17],在保证悬架动力学性能的同时最大限度的回收悬架振动能量。本文中设计了HEV动力系统能量管理策略,充分考虑了悬架再生能量对系统的影响。分别设计了监督控制器和底层子控制器,其中监督控制器用于调节底层控制器的控制参数,而在子控制器中,应用等效消耗最小化策略提高了悬架能量回收性能,并且设计了基于路况的悬架切换规则。
2.1.1 对苏丹草株高的影响 孕穗期苏丹草的株高由高至低的处理依次为F2>F3>F1>F6>MR>CK>F4>F5>P,其中,F2和F3的株高较高,分别为320 cm和318 cm,而P处理苏丹草株高最低,为291 cm。各处理苏丹草的株高较P处理高6.38%~12.68%,各处理(除P,F4和F5)株高较CK提高了1.99%~5.39%,F2和F3的株高均显著高于P(P<0.05),其余各处理与CK相比差异不显著(P>0.05)(图1-A)。
1 系统建模
1.1 系统耦合机理分析
如图1所示,混合动力汽车的动力系统和悬架系统存在着一定的相关性[18],馈能悬架的引入改变了HEV能量流动方向。HEV中能量的存储和转换是以三种形式存在(化学能,电能和机械能),不同能量间转换由能量转换器实现。通常,HEV中的所有能量最终都由燃料的化学能提供。
两种工作模式参数设置为:1.舒适导向模式,设置参数cs值为2 000Ns/m,n值为-0.32;2.道路保持模式,cs和n值分别为3 000Ns/m和-0.52。
本文中选择锂离子电池组给HEV提供动力并存储电能,电池组 SOC(battery charge state)变换遵循以下规律:

仿真中对比分析了主动馈能悬架和被动悬架在工况Ⅱ下的时域响应,使用车身加速度和车轮与路面间的动载荷指标评价车辆平顺性和行驶安全性,如图7。馈能悬架工作模式在1 110 s附近切换,动载荷增加了31.98%,而车身加速度降低了27.9%,结果表明模式切换前,主动馈能悬架工作在舒适模式时,车辆的乘坐舒适性明显改善;切换后,主动馈能悬架工作在馈能模式,其动态性能与被动悬架相近,且车身加速度指标略有降低。
随着时代的发展,河北省特色农产品与互联网联系越来越紧密,相应的特色农产品在全国知名度不断提高,同时结合河北省农产品现状,选择适合的营销策略,在拓宽农产品市场、拉动当地经济发展起到积极作用。但是,河北省农产品网络营销还存在发展阶段,在农户观念、售后、技术等方面还存在问题。

图1 系统能量流
1.2 动力系统建模
本文中应用中国汽车技术研究中心设计的新型双行星齿轮功率分流混合动力汽车动力系统结构[19],如图 2 所示。
3.2.2 同时在上人梯搭设高度超过20m时,开始采用增加设斜向拉绳(双股8号钢丝绳+花篮螺栓)的方式,增强上人梯的稳定性。在预埋钢板上焊接φ20拉环用以固定斜拉绳。斜拉绳水平间距L1=1.2m,每层3个,竖向间距为 H1=6m。
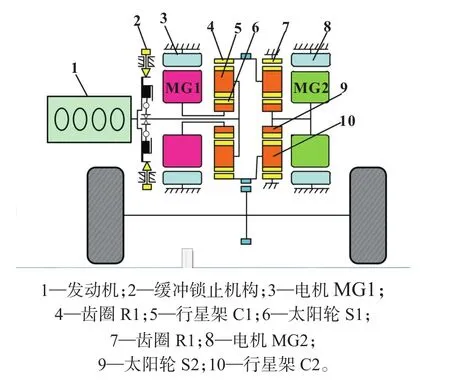
图2 HEV动力系统结构示意图
图2中缓冲锁止机构是HEV的功率分流装置,通过控制缓冲锁止机构与发动机、电机1、电机2的结合与断开,实现系统在多种工作模式间相互切换,工作模式包括:电机MG2单独驱动、电机MG1和电机MG2复合驱动、混合驱动、制动和停车。其中缓冲锁止机构为双行星排齿轮机构,基于杠杆原理[20],得到功率分流动态模型,如图3所示。忽略行星架上行星齿轮的转动惯量和各元件的阻尼,假设各元件均为刚体。

图3 功率分流动态示意图
1.3 主动悬架动力学建模
主动悬架的控制策略和作动器的类型直接决定了悬架能耗的高低。为了在研究中突出悬架能量消耗和动态控制性能之间关系,基于混合控制策略[22],确定悬架的主动控制力Fi为:

图4 整车七自由度模型
根据整车模型,簧上质量的动力学方程如下:

其中:cs为簧载质量速度反馈增益;cg为非簧载质量速度反馈增益。通过调节这两个参数,可以调节车辆乘坐舒适性和安全性。为使悬架系统具有较好的动态性能,参数满足cs>0,cg≤0。令cg=-n·cs(n>0)。该控制策略能直观和定量地揭示悬架控制参数和不同评价标准间的耦合关系。
四个车轮主动力控制方程为:

2 控制器设计
为了实现HEV动力系统和悬架系统的协同控制,如图5所示设计HEV能量管理策略。其中,应用等效消费最小化策略ECMS(equivalent consumption minimization control strategy)设计能量管理控制器[21],由车速和主减速器输入端所需的扭矩Treq计算确定发动机的参考扭矩和转速再通过扭矩分配模块中的PI控制器使发动机在高效率区域工作,根据发动机的参考扭矩和稳定状态下的约束条件进一步计算得到电机MG1、电机 MG2和机械制动系统的扭矩值TGTMTbrk。通过悬架控制器控制四个直线电机的推力Fi(i∈{1,2,3,4})。考虑到悬架与动力传动系统之间的相互作用,根据悬架再生能量值来调节动力系统控制参数。监督控制器会根据路况调整悬架控制参数cs和cg切换主动悬架的工作模式。

图5 PS-HEV能量管理策略
2.1 能量管理策略
为了保持电池组充电的可持续性,电池组当前时刻的放电量必须在下一时刻由燃料化学能补偿。因此,电池组能量变化可以等效为瞬时燃油消耗量。瞬时总油耗为:


在不同等级道路上,采用NEDC循环作为HEV仿真工况,其由4个相同城市行驶周期和一个郊区行驶周期组成。按照表1所列四种输入情况进行仿真对比分析,研究悬架能量再生对HEV能量管理的影响。其中工况中,采用被动悬架,仿真时无能量再生。
2.2 扭矩分配
扭矩分配模块由功率分流架构内扭矩间的关系设计,如图6所示。MG1所需的扭矩由发动机额定扭矩计算的静转矩和用于实现发动机转速跟踪的动态补偿转矩组成。电机MG2扭矩计算在驱动和制动两种情况下不同:驱动时,电机MG2的扭矩由发动机参考扭矩和负载扭矩按照式(11)计算得到。


图6 扭矩分配模块示意图
2.3 监督控制器设计
在动力系统能量管理策略中,估计悬架振动能量来校正等效燃料消耗。根据工况不同,提前给定不同工况下的最优等效因子,在监督控制器中估计一段时间内的悬架能量平均再生功率Psus_ave。
2.4 悬架控制器设计
为了准确描述HEV整车动力学行为,建立了七自由度整车模型,其中直线电机的不同部件分别安装在车身和轮胎上,如图4所示。lf和lr分别表示车辆质心位置到前轴和后轴中心的距离,Bf和Br表示前轴距和后轴距。

式中:lp和lr分别为簧上质量的俯仰和侧倾方向上的转动惯性;tf=Bf/2,tr=Br/2;zb为簧上质量质心处的垂直位移,θ为俯仰角,φ为横摆角,zwi为簧下质量的垂直位移(iϵ{A,B,C,D}分别代表图中左前,右前,左后和右后四个方向);zbi为悬架安装位置处的簧上质量垂直位移;mb、mwi分别表示簧上质量和簧下质量;轮胎被简化为弹性系数为kti的弹簧;zgi为每个轮胎的输入;ksi为悬架弹簧弹性系数;Fi直线电机的主动力。
实验组是在常规治疗的基础上加用还原型谷胧甘肽(上海复旦复华药业有限公司,国药准字H20031265),1.2g还原型谷胧甘肽溶于250 ml浓度为5%的葡萄糖溶液中,静脉滴注,1次/d[3]。以上用药均持续2w。
1)手机应用增加探测、收集以及上传用户感知数据的能力。由于手机应用是上行用户流量的起始点与下行用户流量终止点,其收集的用户感知数据是最准确的。一般来说,探测手段包括手机应用采用UDP PING或者ICMP PING,根据每条发送报文以及收到回应报文的时间点来计算延时、抖动和丢包。
3 仿真验证
根据上述分析建立功率分流HEV动力系统和悬架系统的统一模型。
由公式(1)得到电池组SOC的实际值。
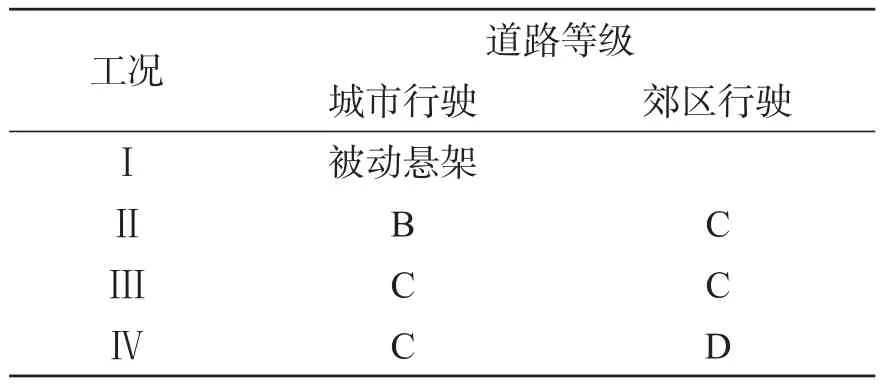
表1 仿真工况
3.1 悬架的动态性能分析
式中,Voc为开路电压,Qbat为电池组容量,Rint为电池组的内阻。另外,车辆速度会同时影响HEV动力系统和主动悬架性能,动力系统所需能量主要由车速决定,而主动馈能悬架能量回收效率由车速和路面不平度共同决定。因此,为了准确评价HEV燃油经济性,将车速和路面不平度作为影响因素,引入了典型行驶工况(NEDC循环工况等),路面不平度参照GB7031《车辆振动输入-路面平度表示》标准。

图7 悬架动态响应(a)车身加速度;(b)动载荷
图8为工况II和III下主动馈能悬架的能量再生功率分布情况.可以看出,通过设置合适控制参数,馈能悬架能量再生功率在整个仿真过程中都为负值;悬架能量再生功率受到路面状况和行驶工况的共同影响。

图8 能量再生功率
3.2 HEV燃油经济性分析
图9对基于规则的能量管理策略与ECMS控制策略进行对比,分析了Ⅰ、Ⅱ、Ⅲ、Ⅳ工况下电池SOC变换趋势。表2列出了四种工况下两种控制策略的燃油消耗量和电池最终SOC值。
如图9(a)所示,使用基于规则的控制策略,再生能量会优先对电池组进行充电;如图9(b)所示,使用基于ECMS控制策略会优先保持电池组SOC在一定范围内波动。应用不同控制策略,电池组SOC表现不同。表3中所示,使用ECMS控制策略时电池组最终SOC表现优于使用基于规则的控制策略。
本题共有四个基本点,由条件可知C、D是可以先确定的,满足条件CD=4,由于BD的长度未知,点B不易确定,点A同时满足两个条件,即∠CAD=45°,AB=3,即满足双轨迹的基本条件,因此可以明确构造点A是关键,作AB⊥CD,垂足为B.
HAIMER位于德国Igenhausen市,是一家中型家族企业,研发和生产革命性的超高精度工具。其产品主要有高精度动平衡刀柄、刀具专用动平衡机、刀柄热缩机、3D寻边器及对中仪等。2009年,HAIMER于上海成立中国总部,全面负责中国大陆的市场推广、产品应用以及售后服务。
比较表2中各工况下燃油消耗量可知,使用ECMS控制策略时,HEV的燃油经济性更好。对比电池组最终SOC值,发现其全部大于初始值,

表2 不用工况燃油消耗量

图9 SOC变换情况(a)基于规则控制策略;(b)ECMS
而基于规则控制策略下最终SOC与初始值的差值更大。这是因为HEV中所有的能量都由化学能转换而来,电池组最终SOC值变化会造成额外的燃油消耗。另外,ECMS控制策略中是将燃油消耗做为控制目标,通过实时调节发动机和两台电机的输出转矩,一方面提高了能量转换效率,另一方面还保持了电池组充放电的平衡。因此,采用ECMS能量控制策略能更好的维持电池充放电效率。
我们可以把复原力[11]理解成个体的保护性因素,包括个体自身的特质和个体外部的因素,前者包括自我效能感、气质、社会技能等个体内部具备的特质,后者包括家庭或社区的支持等外部因素;也可以理解成个体的保护性因素与外界相互作用的过程。
4 小结
本文根据控制参数对悬架动态性能和燃油消耗量的影响机理,设计了监督控制器,用于实时调整子控制器控制参数,通过定量比较对不同等级道路和速度情况下悬架动态性能,推导出悬架模式切换规则。控制器设计中,综合考虑了悬架舒适性与行驶安全性的统一,在不同行驶条件,侧重不同控制目标。仿真结果证明,引入主动馈能悬架,对HEV燃油经济性的提高具有积极影响。悬架振动能量再生效率由路面不平度和车速共同决定,道路不平度越大,速度越快,再生能量越多。另外,与基于规则的策略相比,采用基于ECMS控制策略能更好的保持电池SOC性能。馈能悬架技术的应用也为进一步提高HEV燃油经济性提供了一种新方案。
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
力学学报(2020年4期)2020-08-11
消费导刊(2017年19期)2017-12-13
科学与财富(2017年15期)2017-06-03
黑龙江电力(2017年1期)2017-05-17
科技创新与应用(2017年1期)2017-05-11
北京汽车(2016年6期)2016-10-13
现代制造技术与装备(2015年4期)2015-12-23
电源技术(2015年11期)2015-08-22
电源技术(2015年9期)2015-06-05
