
基于Kriging模型的座椅子系统安全性能优化研究
2019-12-06 02:47郑建洲陈有松吕斌斌尹浩庆
汽车工程 2019年11期
郑建洲,陈有松,吕斌斌,尹浩庆
(1.同济大学汽车学院,上海 201804; 2.上海汽车集团股份有限公司商用车技术中心,上海 200438)
前言
由座椅和安全带等构成的座椅子系统作为汽车乘员约束系统中重要的一部分,在汽车正面碰撞过程中,对乘员起着重要的约束保护作用[1]。座椅子系统是多参数非线性系统,其中影响乘员安全的参数众多,且参数之间存在着交互效应[2],因此必须综合考虑各参数的不同影响。
针对复杂非线性系统,敏感参数的筛选对整个系统的优化至关重要。其中较为典型并被广泛使用的是局部敏感性分析,该方法操作简单,每次只考虑一个参数的变化而其他参数保持不变,不过这种方法有局限性,不适用于复杂的乘员约束系统。近年来,考虑所有参数同时变化及相互影响的全局敏感性分析方法在复杂工程问题中受到广泛关注[3]。另外,近年来国内外学者对汽车乘员约束系统的设计分析主要集中在试验设计、代理模型技术、优化方法的嵌套使用。如Gu等[4]使用Kriging代理模型对正面碰撞过程中汽车乘员约束模型进行多目标优化;江苏大学江洪等[5]建立了后排乘员约束系统仿真模型,并分别运用Kriging法和响应面法构建代理模型,综合考虑坐垫翻转参数对假人伤害指标的影响;江苏大学葛如海等[6]在对乘员约束系统进行匹配设计时,分析了坐垫倾角对乘员损伤的影响,并采用响应面法对约束系统的设计参数进行了优化;湖南大学马桃等[7]采用 Sobol指数法进行全局灵敏度分析,并将多岛遗传算法和Kriging模型应用到乘员约束系统的优化中。
遵照我国法规GB 11551—2014《汽车正面碰撞的乘员保护》,整车开发流程中,座椅子系统碰撞性能开发一般早于整车约束系统性能开发,而在座椅子系统台车正撞试验中由于不带仪表板、白车身和安全气囊,故无法将假人的伤害值作为评判座椅子系统在正撞过程中对乘员保护作用优劣的依据。通常在座椅子系统台车试验中,用假人H点的前移量和下潜量来作为判断指标。
本文中借助有限元仿真和Kriging代理模型,分析了正面碰撞时座椅子系统参数对乘员保护效果的影响,并采用NSGA-II遗传算法进行多目标优化,确定了座椅子系统的全局最优设计参数。
1 仿真模型的建立与验证
1.1 仿真模型的建立
本文中采用 Hybrid III 50th假人,按照 GB 11551标准要求搭建了前排驾驶员座椅子系统正撞台车试验的仿真模型,如图1所示。其中安全带使用软件Primer混合建模,与假人接触的部分采用二维单元,其余部分用一维线性单元模拟。安全带限力器的限力值为 2 250 N,安全带预紧长度为75 mm。台车地板采用刚体模拟,并将50 km/h整车正撞试验时采集到的x向加速度曲线赋给地板。

图1 座椅子系统台车试验仿真模型
1.2 仿真模型的验证
以安全带的肩带力和腰带力、假人髋部最大加速度、假人H点最大前移量和最大下潜量以及假人的运动姿态为指标,对比分析在相同碰撞工况下的台车正撞试验与仿真结果,以验证模型的有效性[8]。
(1)假人安全带受力及相关运动曲线对比
图2为台车正撞仿真与试验结果的对比。从图2(a)~图2(c)可看出,仿真与试验结果的安全带力曲线和假人髋部加速度曲线走势基本一致,峰值及峰值时刻也吻合良好。从图2(d)和图2(e)可看出,仿真结果中假人H点的最大前移量和最大下潜量与其对应的试验最大值也很接近。性能响应指标峰值的具体误差见表1。

表1 性能响应指标峰值仿真与试验结果对比
(2)假人运动姿态的对比
图3为20,60和100 ms 3个时刻的假人仿真动画与试验情况的对比。可以看出,在碰撞过程中左边仿真与右边试验假人运动姿态基本一致。
通过比较仿真与试验中假人的安全带力与髋部加速度、假人H点的前移量与最大下潜量和假人的运动姿态可知,该仿真模型具有较好的精度,能够有效地模拟座椅子系统台车试验,可用于后续研究。
2 座椅子系统参数灵敏度分析
2.1 影响因素的确定
在正面碰撞中,为更加细化座椅子系统中众多参数对乘员伤害的影响程度,根据经验以及项目实际情况,选取了对乘员的损伤有影响的11个参数,确定了这些参数的初始值及取值范围,见表2。
2.2 试验设计(DOE)
最优拉丁超立方设计(optimal Latin hypercube design,Opt LHD)具有良好的空间填充性和均匀性,可使生成的样本点在全局空间内分布更加均匀[9],因此,选取该方法生成样本点。
表2给出了文献中同类电路的相关性能比较。相比于只能产生基准电压的文献[6-9]和只能产生基准电流的文献[11-13],文中提出的基准电路既可以产生基准电流又可以产生基准电压,而且功耗远小于其他文献。

图2 仿真与试验结果对比
针对表2中的设计参数,首先应用最优拉丁超立方试验方法在设计空间抽取80个样本点,然后利用Isight中的Data Exchanger命令将参数样本点数值分别写入相关的K文件中,并提交至LS-DYNA仿真平台对这些样本点分别进行仿真计算,得到假人的安全带力与髋部加速度和假人H点的前移量与下潜量。随后将样本点数据和计算结果数据汇总,利用Isight建立DOE流程对其灵敏度进行分析。
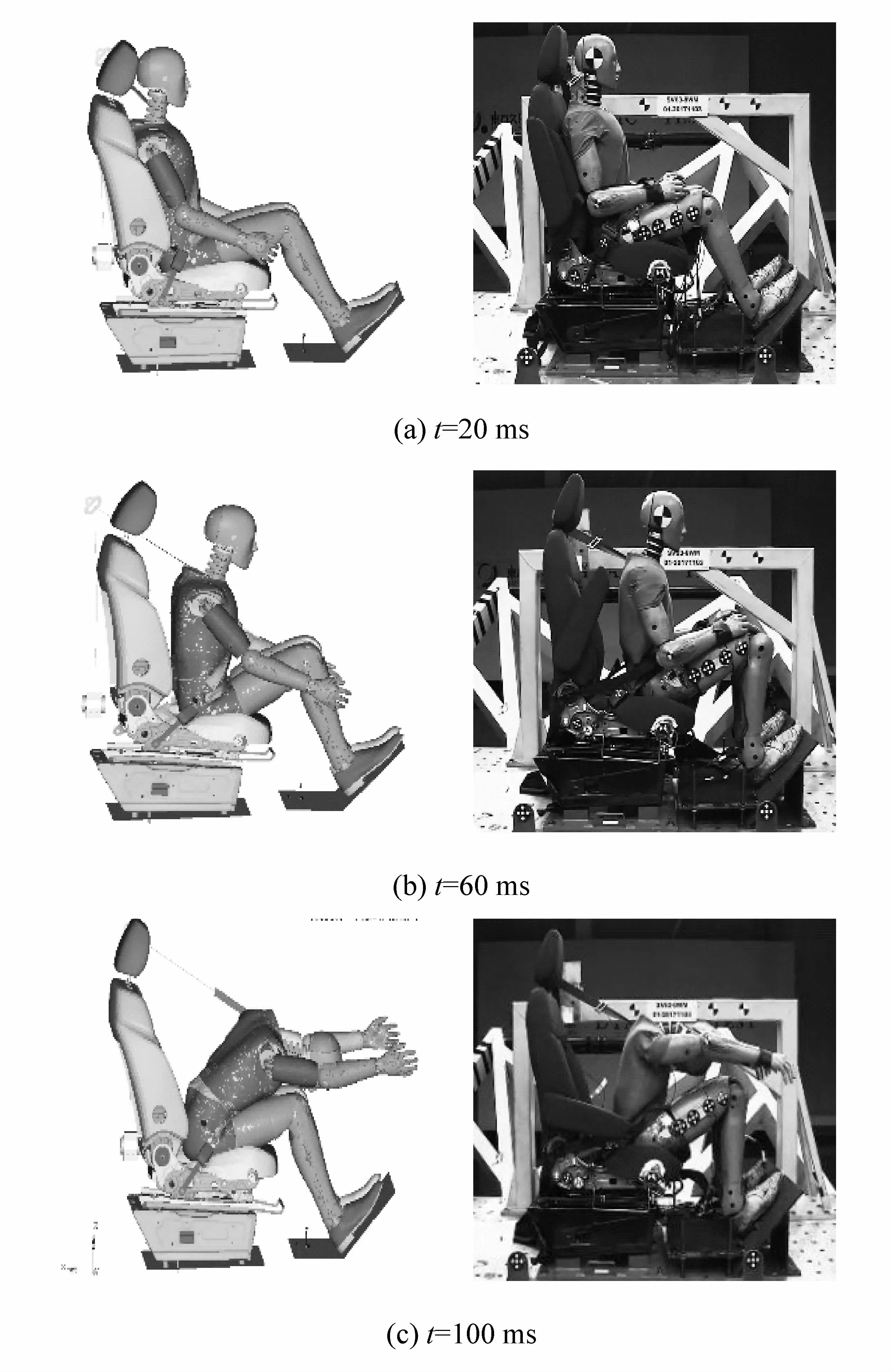
图3 仿真与试验假人运动姿态对比

表2 设计参数的取值范围
2.3 参数灵敏度分析
参数的敏感性可通过Pareto图来直观描述,Pareto图反映样本点经过拟合后模型中各输入参数对每个输出响应贡献程度的百分比[10]。右边的条形表示正效应,意味着随着输入的增大,响应也会增大;左边表示负效应,与之相反。
本次座椅正撞试验设计参数对性能响应指标影响的Pareto图如图4所示。左边的Pareto图主要是为更加直观地对比各参数灵敏度而单独选取的1阶参数,右边的是考虑各参数之间存在交互效应,并从中挑选影响程度排名前10的参数。
从图4可看出,假人与坐垫摩擦因数f4对假人H点前移量Hx、假人髋部加速度峰值Acc_max和安全带腰带力峰值F2b都是影响最敏感的因素;预紧长度L对各个目标响应指标的影响程度也很敏感,但是对安全带肩带力峰值F1b的影响很小,这可能是因为在碰撞初期,安全带预紧回拉的过程中肩带受力变化很小所致;安全带与上滑环摩擦因数f1和限力器限力大小F这两个参数对安全带肩带力峰值F1b的影响最大,而对其余目标响应指标的影响普遍都较小,但两者同时变化时的交互作用对各个目标响应指标影响却不能忽视,因此不能因为某个或某两个参数的灵敏度较低而忽视其交互作用的影响。
通过对11个设计参数的灵敏度分析,并考虑假人H点的前移量和下潜量是项目考量的主要目标,从中挑选出了假人与坐垫摩擦因数f4、预紧长度L、安全带延伸率Q、预紧器预紧时间T2、假人肩部与安全带摩擦因数f5和安全带与下滑环摩擦因数f2这6个敏感度较高的参数,设定好参数的变化范围,用于后续优化模型的建立,而对其余敏感度低的参数,保持其初始值不变。
3 座椅参数优化
在座椅子系统台车试验中,影响乘员安全的参数很多,且设计变量与目标函数之间非线性强,故座椅参数优化属于多目标多参数的优化问题,通常用假人H点前移量与下潜量来作为判断座椅正撞性能是否满足要求的参考指标。因此,下面代理模型的建立和优化也主要基于这两个指标要求,具体优化流程如图 5所示[11]。
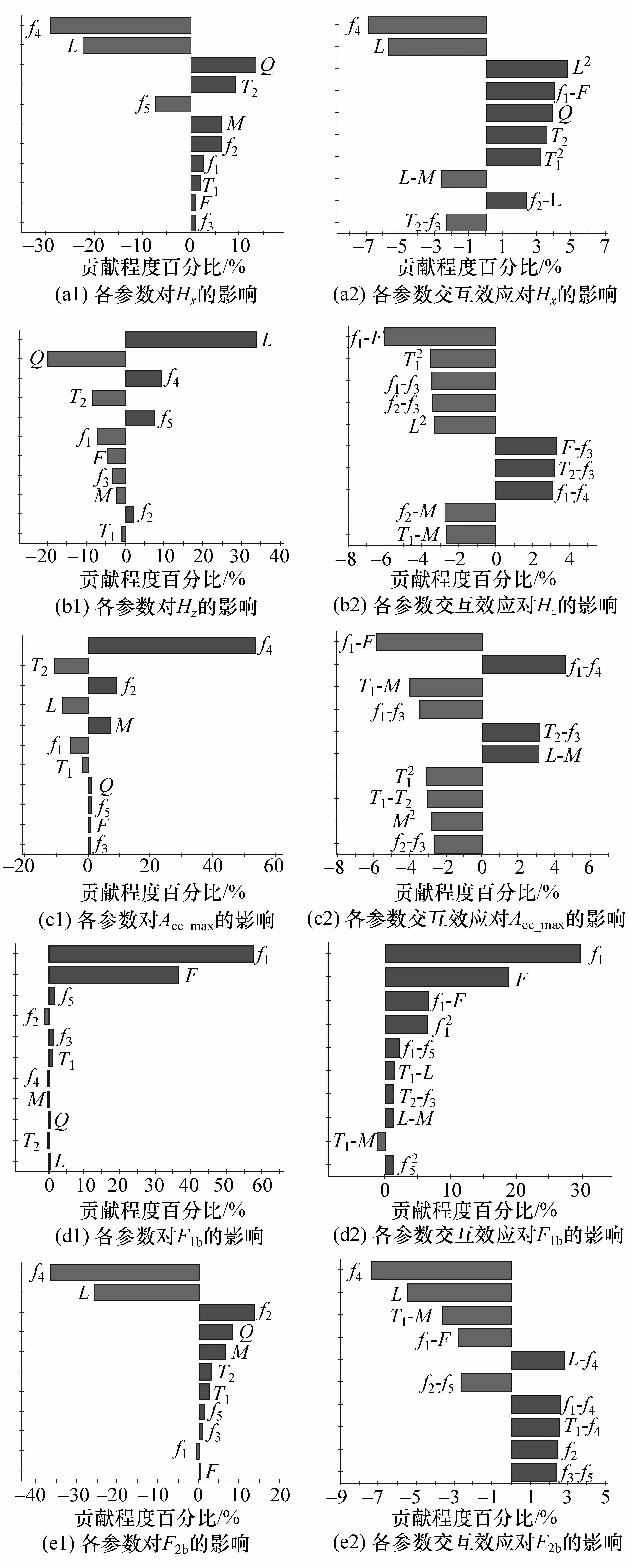
图4 各参数对性能响应指标影响的Pareto图
3.1 约束目标的确定
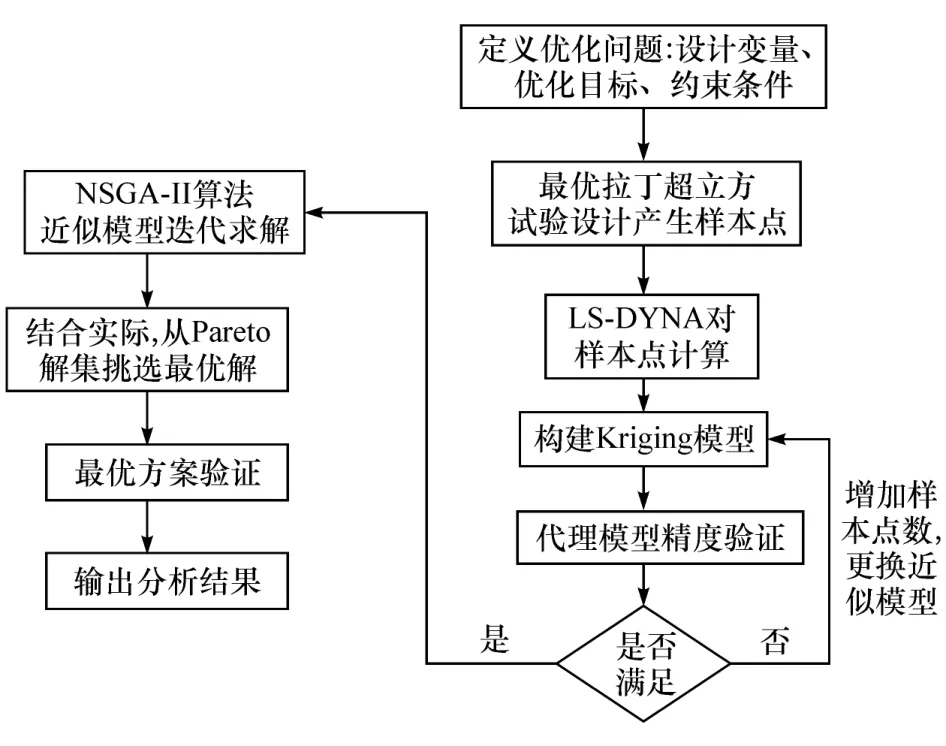
图5 优化流程图
3.2 K riging模型的构建
对于座椅子系统碰撞而言,若采用直接调用LSDYNA程序进行优化则须花费很长时间,若采用近似模型可解决计算时间长且不稳定的问题,同时可预估输入输出参数之间的响应关系[12]。本文中采用Kriging模型,它是一种估计方差最小的无偏估计模型,其在解决类似于座椅子系统这类非线性程度较高的问题时比较容易取得理想的拟合效果[13]。
从先前DOE方法已经抽取的80个样本点数据中,随机选择10个样本点用做误差分析,在Isight中构造了这两个输出目标与设计变量之间的Kriging模型。
通常采用决定系数R2来验证模型精度。R2取值越接近1表示近似模型精度越高,反之则精度越低。验证结果如表3所示。可以看出,假人前移量和下潜量的R2值都在0.9以上。由于采用R2来验证精确度有一定的偏差[14],即使模型中增加的变量没有统计学意义,R2同样也会增大,所以为更加精确地验证模型,对随机挑选的10个样本点进行仿真,结果如表4所示。由表可见,Kriging模型计算误差均在6%以内,表明构建的代理模型具有较高的可信度,可代替约束系统仿真模型用于座椅参数的优化和座椅参数对乘员损伤的影响分析。

表3 K riging近似模型决定系数R2

表4 K riging模型精度验证
3.3 优化目标的K riging模型分析
主要对假人H点的前移量Hx和下潜量Hz分别与其灵敏度较高的6个设计变量的Kriging模型进行分析,以确定正面碰撞时座椅子系统参数对乘员保护效果的影响。
图6和图7分别为假人H点的前移量Hx和下潜量Hz与其中两个设计变量的Kriging模型。由图6(a)可见,f4和L这两个变量对Hx的影响最大且均为负相关,Hx的变化趋势较复杂,响应和变量之间非线性程度明显,说明两者之间存在较大的交互作用;由图7(a)看出,L对 Hz的影响很大,且为正相关,随着L的增大,假人H点下潜量也明显增大,不过f4的变化对 Hz的影响一般。由图6(b)和图7(b)可见,F和f1的交互作用很强,两者共同作用时能对Hx和Hz均产生较大的影响,但具体分析还须综合考虑其它参数的影响。由图6(c)和图7(c)可见,Q和T2对Hx和Hz的影响都较大,不过对Hx均为正相关,对 Hz均为负相关,且两者的交互作用较低。
3.4 优化分析
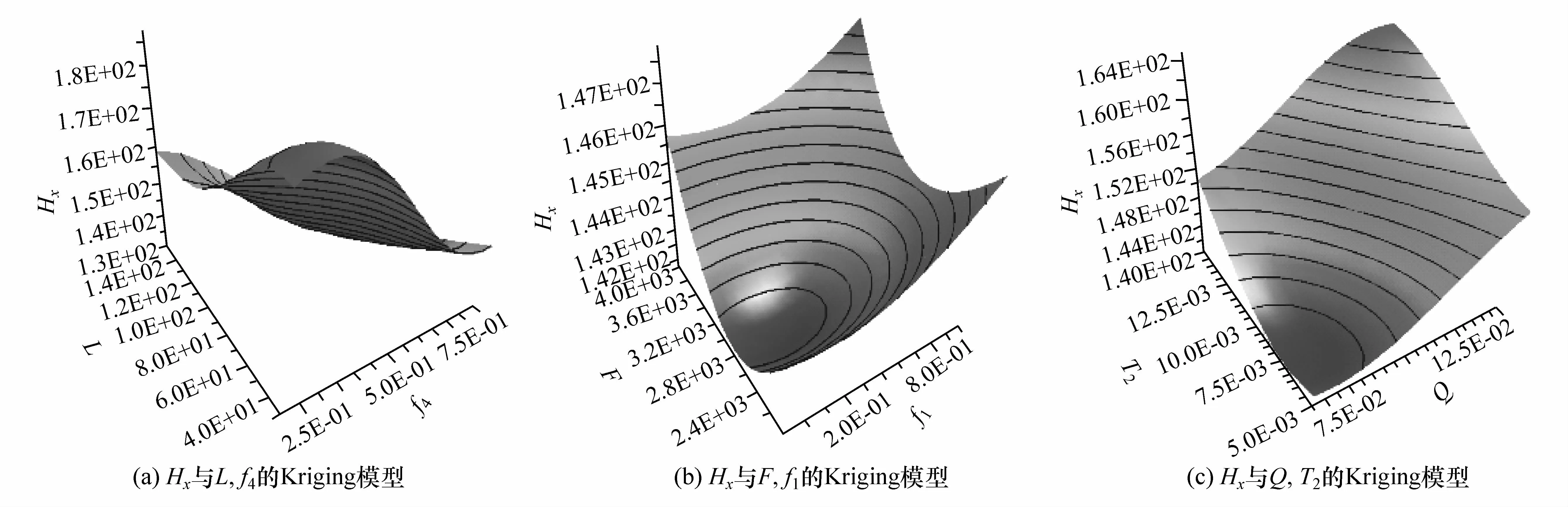
图6 假人H点前移量Hx与各设计变量的Kriging模型图
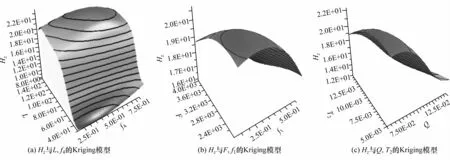
图7 假人H点下潜量Hz与各设计变量的Kriging模型图
尽管灵敏度分析通过改变设计参数提供了对损伤水平影响的指导,但它无法直接形成最佳系统配置以最大限度地减少伤害。为解决这个问题,可采用多目标优化。多目标优化通常不可能得到完全满足所有目标性能的最优解,只能是在各个目标之间进行权衡和折衷处理,使各子目标尽可能达到最优,即所要找的并不是所有子目标的最优解,而是Pareto解[15]。可见,多目标优化问题是一个非常复杂的问题,需要结合决策要求,在Pareto解集中选取相对较优的解才具有实际意义。
本文中采用多目标遗传算法NSGA-II(精英保留非劣排序遗传算法),其优点在于探索性能良好,在非支配排序中,因为接近Pareto前沿的个体被选择,使Pareto前进能力增强。基于Kriging模型的多目标优化问题的求解,经过241次迭代,最终得到一个Pareto解集。
根据实际需要,从Pareto解集中选择了3组优化解,其中方案一为Isight推荐的最优解,方案二和方案三为从Pareto解集中另外挑选的较为满意的优化解,如表5所示。优化后的参数值和优化结果对比如表6所示。可以看出,近似模型的优化与仿真结果之间的误差总体较小,只有Hz值误差超过了7%,但仍在可接受的范围内。
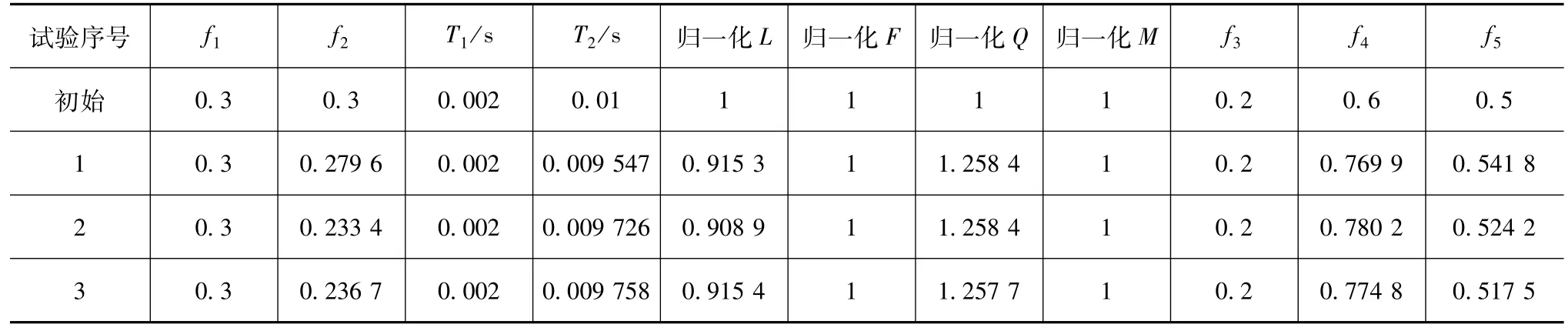
表5 Pareto解集优化解设计变量参数

表6 优化结果对比分析
综上可得,与设计初始值相比,所挑选的Pareto前沿解集中的优化解对应的性能指标均有不同程度的提升,但Isight推荐的最优解并非为对假人前移量和下潜量的性能提升最明显的解。通过对比发现,方案二属于Pareto前沿解集中的最优解,其中,假人H点前移量相比初始值下降了2.98%,假人H点下潜量下降了10.47%,确定了正面碰撞时座椅子系统的全局最优设计参数,证明了该方法的可行性。
4 结论
通过对影响座椅子系统正面碰撞台车试验结果的因素灵敏度分析,确定了座椅子系统在发挥乘员保护作用中的6个主要影响参数。结果表明,假人与坐垫摩擦因数和安全带预紧长度对假人H点前移量、假人髋部加速度峰值和安全带腰带力峰值等影响较大,但还要考虑某些灵敏度较低参数之间交互作用的影响。
通过建立有效的Kriging代理模型,并采用NSGA-II遗传算法进行多目标优化,确定了正面碰撞时座椅子系统的最佳设计参数,有效提升了座椅的安全性能。
猜你喜欢
汽车实用技术(2022年4期)2022-03-07
商用汽车(2021年4期)2021-10-13
北京汽车(2021年3期)2021-07-17
汽车与驾驶维修(维修版)(2021年2期)2021-04-07
汽车工程(2021年12期)2021-03-08
数学大王·低年级(2020年4期)2020-04-20
时代汽车(2020年23期)2020-03-03
世界汽车(2019年6期)2019-06-20
语文周报·教研版(2018年14期)2018-05-03
儿童故事画报·发现号趣味百科(2017年9期)2018-03-13
