
多智能体系统的固定时间和有限时间比例一致性
2021-04-29 04:49赖艺芬
集美大学学报(自然科学版) 2021年2期
陈 超,赖艺芬
(集美大学理学院,福建 厦门 361021)
0 引言
自然界纷繁复杂,人们经常能看到成群的动物聚集在一起,比如蚁群、牛群、鸟群、鱼群等。这些群体的规模有时达到成千上万,而且有时并不存在一个统一的领导者,但这些群体都具有集体捕食和集体抵御天敌的能力,生物的这种特性被称为“群集行为”。受此启发,人们开始从不同的角度对这种群集现象进行深入的研究,提出了多智能体的概念,多智能体系统的研究就是在这种应用需求下应运而生的。从群体行为的不同角度来看,多智能体系统协同控制大概可以分为聚集问题、蜂拥问题、编队问题等几类,这几类问题可以看作是一致性问题的延伸和体现。因此,多智能体系统的一致性问题是该研究的基础和热点。
多智能体的一致性问题[1-5]主要基于多智能体系统中各智能体相互之间的信息交换,通过设计一致性协议使得所有的智能体的状态趋于一致。在实际应用中,多智能体系统的收敛速度十分重要,已有的很多一致性算法使得群体系统状态达到渐近稳定,但实际系统的状态变量不可能在有限的时间内达到平衡状态,因而有限时间一致性问题具有很强的工程应用背景。文献[6-8]研究了多智能体系统的有限时间一致性问题。尽管以上研究很好解决了多智能体系统的有限时间一致性问题,但系统的收敛时间都与智能体的初始状态有关,当系统初始状态很大时,系统收敛时间会受到较大的影响。为了解决初始状态的问题,多智能体系统的固定时间一致性问题得到了学者们的研究[9-13]。
相比于文献[6-8],本文提出一种新的协议,即多智能体系统的收敛时间不再依赖于系统的初始状态,同时多智能体不再收敛于同一状态,而是按照既定的比例收敛到不同的状态。
1 预备知识及模型介绍
1.1 图论
1.2 相关定义及引理





引理4[19]如果V(x(t)):Rn→R是连续函数,x(t):[0,+∞)→Rn在[0,+∞)是C-正则的,x(t):[0,+∞)→Rn在[0,+∞)的任意紧区间是完全连续的。如果存在一个连续函数H:(0,+∞)→(0,+∞),当ζ∈(0,+∞)时,H(ζ)>0,使得右上导数DV(t)≤-H(V(t))。令H(V)=αVp+βVq,则:1)如果0≤p,q<1,则V(t)会在有限时间内达到0,且收敛时间T满足T≤min{V1-p(0)/(α(1-p)),V1-q(0)/(β(1-q))};2)如果p>1,0≤q<1,则V(t)会在固定时间达到0,且该时间T估计为T≤Tmax=1/(α(p-1))+1/(β(1-q))。
2 问题描述
考虑一个具有n个智能体的多智能体系统,智能体i的动力学方程可写为:
(1)
其中:xi(t)∈R表示智能体i的状态变量;ui(t)∈R表示系统的控制输入。
设计如下的控制协议:
(2)

定理1 在非连续控制协议(2)下,如果0<γ<1,则多智能体系统(1)在任意初始条件下达到有限时间比例一致性;如果γ>1,则多智能体系统(1)在任意初始条件下达到固定时间比例一致性。

(3)
选取Lyapunov函数为:
V(t)=xTSTSx/2,
(4)
其中S=diag(si·sign(si))。
结合引理 1,则有:

(5)
当γ>1时,由引理2及引理3可知,

从而由引理4可知,系统(1)达到固定时间比例一致性,且收敛时间满足
(6)
注1 多智能体系统(1)的固定时间一致性和有限时间一致性可以通过同一个控制器(2)来获得,而当控制器中的参数γ在不同范围取值时,可以决定系统是达到固定时间一致还是有限时间一致。另外,由于引入了比例系数,使得多智能体不再收敛于同一状态,而是按照既定的比例收敛到不同的状态。当比例系数等于1时,就是普通的一致性问题,显然比例一致性比普通的一致性更有实际意义。
3 实例验证

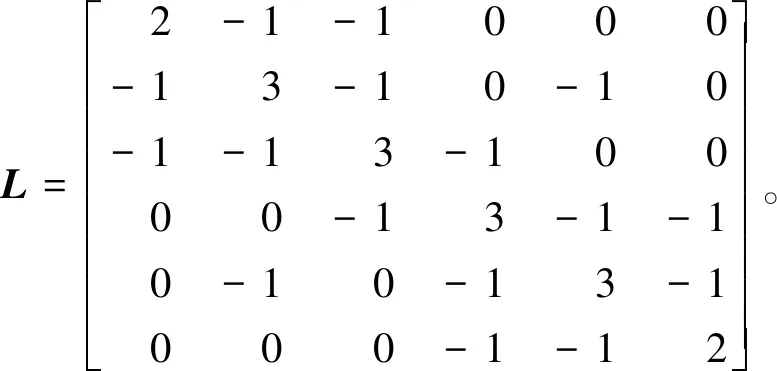
考虑由6个智能体组成的多智能体系统,6个智能体的连通拓扑图如图1所示。
由通信拓扑图可得Laplacian矩阵为:

猜你喜欢
辽宁教育(2022年19期)2022-11-18
汽车实用技术(2022年9期)2022-05-20
控制与信息技术(2021年2期)2021-07-23
控制与信息技术(2021年2期)2021-07-23
小学生学习指导(高年级)(2021年3期)2021-04-06
疯狂英语·新悦读(2021年1期)2021-01-27
小学生作文(低年级适用)(2019年5期)2019-07-26
小学生学习指导(高年级)(2018年3期)2018-11-29
读友·少年文学(清雅版)(2018年12期)2018-04-04
读写算·高年级(2017年4期)2017-04-15
