
剑杆织机用凸轮机构设计
2021-08-30 08:25梅宝龙袁汝旺
纺织器材 2021年4期
梅宝龙,袁汝旺
(1.中国纺织机械协会,北京 100028;2.天津工业大学 机械工程学院,天津市现代机电装备技术重点实验室:天津 300387)
0 引言
凸轮机构一般是由主动件和从动件组成的高副机构,可将凸轮连续回转运动转化为从动件往复移动或摆动。凸轮机构结构简单、紧凑,可实现从动件预期的复杂运动规律,高速运动可靠性高。凸轮机构主要包括平面凸轮机构与空间凸轮机构[1]等,在纺织机械中应用广泛,如织造机械的开口机构、打纬机构和引纬机构[2-4],以及经编机梳栉横移机构[5]、卷绕机卷绕头[6]和络筒机槽筒[7]等。目前,国内纺织机械用凸轮多采用三维扫描技术获取凸轮廓线数据,并经过数据处理后进行凸轮廓线加工,导致实际工作车速不足、振动噪声大、可靠性差等问题,与国外同类产品相比存在较大差距。因此,设计满足纺织工艺需求的凸轮机构有利于增强国产纺织装备领域研发实力,对提升技术水平、产品质量及核心竞争力具有重大意义[8]。
凸轮是纺织装备领域的关键零部件,而国内纺织装备制造企业与相关科研院所或高校对纺织机械用凸轮设计与制造的基础理论研究不足;主要体现在:凸轮机构运动特性与纺织工艺分析耦合关系不清楚,凸轮机构从动件运动规律产品系列化不足,纺织工艺可靠性的动力学分析不足等方面。笔者从纺织工艺与凸轮机构运动特性耦合的视角,提出凸轮从动件运动规律反求、拟合与重构方法,探讨从运动规律角度开展凸轮机构系列化设计,分析凸轮机构运动可靠性。凸轮机构实现预定的纺织工艺,其工艺变化需更换凸轮,故产品多样性的关键是依据工艺需求将含凸轮机构部件或单元系列化,包括从动件运动规律系列化、结构形式与参数模块化、关键部件单元系列化等,有助于实现纺织机械产品系列化。
1 凸轮机构设计原则
1.1 以实现纺织工艺为根本目标
以纺织工艺为出发点,分析纺织工艺与凸轮机构构型及其运动特性的关系,确定凸轮机构构型。结合工艺参数与特征值对凸轮机构进行设计,如考虑速度与纱线张力的关系、扭矩与电机特性的关系、凸轮运动特征值峰值对纺织品力学性能的影响等,有利于提高纺织品质量。
1.2 以凸轮机构运动规律特性为核心
凸轮机构可实现预定的运动规律,从动件运动采用三角函数或多项式函数,凸轮运动规律可实现简单运动。但简单运动规律不适用于纺织机械用凸轮设计,因此复杂从动件运动采用分段组合函数或傅里叶级数运动规律,该运动规律灵活性大,可根据不同工艺进行相应参数调整,当工艺发生变化时,修改特定参数得到符合工艺变化后的凸轮轮廓线,有助于将凸轮机构从动件运动特性系列化。
1.3 以纺织机械系统设计动力学分析为手段
纺织品既是被加工的对象,又是力和运动的传递媒介,以纺织品与机械耦合作用的凸轮设计方法,对凸轮机构进行纺织品与机械耦合作用下的多物理场分析,从纺织品力学性能和产品质量方面提出凸轮机构设计参数。基于凸轮机构构型进行运动可靠性及动力学分析,提高从动件运动精度,减少高速工况下的振动、噪声等,切实提高纺织机械装备质量。
2 剑杆织机用凸轮机构设计
剑杆织机的开口机构、引纬机构和打纬机构,通常采用共轭凸轮或圆柱凸轮实现其运动规律,满足织造工艺需求。国产剑杆织机用凸轮从动件运动规律主要采用分段函数或简单的三角函数,在高速运转条件下织机停车故障率高、振动噪声大。笔者以一组正弦或余弦函数为基础,基于傅里叶级数构造,设计了满足不同织造工艺需求的凸轮从动件运动规律,其计算公式见式(1)。
式(1)中:S(θ)为从动件角位移;v(θ)为从动件角速度;a(θ)为从动件角加速度;θ为织机主轴转角;θ0为从动件升程所对应的织机主轴转角;a0,bn,cn分别为傅里叶级数的系数,由边界条件确定;ω为织机主轴转速;k为傅里叶级数的阶数;h为从动件角位移最大幅值。
式(1)为傅里叶级数的基本形式,依据织造工艺的差异性,合理选择傅里叶级数的构成及其阶数和从动件升程对应的织机主轴转角是十分重要的。
2.1 旋转式电子多臂开口凸轮设计
旋转式电子多臂开口机构为复动式开口,多臂机主轴旋转360°形成2次开口,且经纱满开到综平(H0至H1)与综平到满开(H1至H2)的所有多臂机主轴转角均为90°,图1为经纱开口过程示意。

图1 经纱开口示意
旋转式电子多臂机的变速运动由多臂机主轴匀速转动与凸轮从动件绕铰接点的往复摆动2部分组成,图2为旋转变速运动的合成原理。由图2可知,在运动周期φ0内,转子臂与偏心连杆的牵引与角位移为连续变化的直线或曲线,且幅值与运动周期φ0相等,而相对角位移由初始位置开始在正负极限位置之间连续往复摆动,振幅为φrimax。相对角位移是关于点(φ0/2,0)的对称曲线,绝对角位移是关于点 (φ0/2,φ0/2)的对称曲线。凸轮从动件的往复摆动规律对综框静止时间、经纱张力与机构的动态特性影响很大,设计合理凸轮从动件运动规律并形成系列化以满足不同车速与幅宽织机的开口需求。
a) 牵引角位移
图3为织机主轴旋转1圈的旋转变速运动规律的运动特性。由图3可知,旋转变速运动的角速度和角加速度连续变化无突变,有利于织机综框的平稳运动。

a) 绝对运动角位移
旋转变速运动经曲柄摇杆机构传动,实现提综臂具有一定停顿时间的往复摆动运动。图4为不同速度参数下提综臂的运动特性。由图4可知,提综臂的运动特性由调节系数b控制,系数b越小,综框相对静止时间越长,但综框运动的速度和加速度越大,易引起经纱断头与机器振动,不利于高速。因此,需合理选择调节系数b且平衡开口时间与动态特性的关系,并开发设计系列化凸轮,才能满足不同幅宽与车速的织造需求。
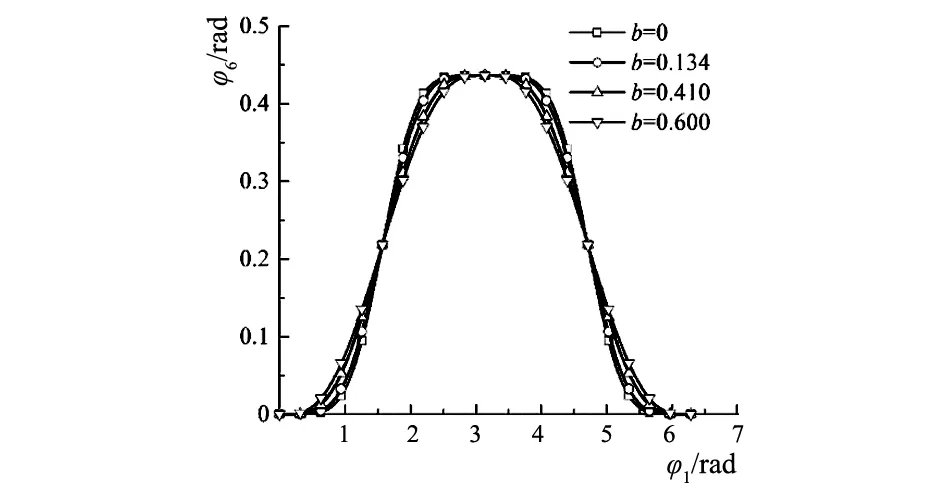
a) 提综臂角位移
2.2 变导程螺旋引纬凸轮设计
变导程螺旋引纬机构利用曲柄滑块机构驱动变导程螺杆往复摆动,并通过传剑轮驱动剑杆带的直线往复运动。为满足织机不同车速与幅宽的需求,在不改变曲柄滑块机构与传剑轮尺寸的条件下,合理调节螺杆的导程以适应不同的织造条件。
图5和图6是幅宽分别为320 cm与380 cm的螺杆导程与剑杆带动程,可知,不同幅宽螺杆导程变化和剑杆带动程具有相似的运动特性;在曲柄滑块机构动程不变的条件下,合理调节螺杆导程的变化规律可满足不同幅宽(170 cm~430 cm)的织造需求,且可通过调节曲柄的尺寸以满足纬纱交接条件。

图5 旋转多臂运动合成

图6 剑杆运动特性
2.3 共轭凸轮打纬机构设计
从织物形成角度看,打纬机构为剑杆织机5大机构的核心,通过调节打纬机构惯性力来满足不同织物负载与纬密要求,而打纬机构加速度是影响惯性打纬力的关键。图7为3种不同幅宽织机打纬运动规律曲线。
由图7可知,幅宽相同时,织造产品不同应选择不同的凸轮轮廓线;幅宽不同时可调节打纬运动所占织机主轴转角的比例,调节远休止角时间及其动态特性以满足不同幅宽、车速与品种的织造需求。

a) 筘座脚角位移
3 结论
凸轮机构及其系统是纺织装备的关键部分,其廓线形状与纺织工艺密切相关。因此,应从纺织工艺的差异化需求出发,探索凸轮机构的动态特性与纺织工艺的耦合关系,通过凸轮机构建模及其动态特征参数、机构尺寸参数和从动件运动规律的系列化配置,开发系列化凸轮,在满足纺织工艺差异化需求的前提下,进一步提升装备的可靠性、稳定性和核心竞争能力。
猜你喜欢
机电信息(2021年17期)2021-07-01
河北画报(2021年2期)2021-05-25
内燃机与配件(2020年22期)2020-09-10
甘肃教育(2020年8期)2020-06-11
作文成功之路·小学版(2020年11期)2020-02-01
课程教育研究·学法教法研究(2018年14期)2018-08-11
西南农业学报(2018年1期)2018-02-28
中国军转民(2017年11期)2018-01-31
进出口经理人(2017年10期)2017-09-22
光学仪器(2016年5期)2017-01-12
