
多波束渔用声呐最优工作频点选取方法及探测性能分析
2021-11-03 07:40李国栋谌志新汤涛林
渔业现代化 2021年5期
李国栋 ,谌志新 ,汤涛林 ,陈 军,程 婧
(1 中国水产科学研究院渔业机械仪器研究所,上海 200092;2 青岛海洋科学与技术试点国家实验室,深蓝渔业工程装备技术联合实验室,山东 青岛 266000)
探鱼仪作为海洋渔业中使用最广泛、最典型的助渔仪器之一,有效地提高了海洋渔业的捕捞效率[1-3]。常见的探鱼仪种类分为垂直单波束探鱼仪、水平探鱼仪、垂直双频探鱼仪、分裂波束探鱼仪和多波束渔用声呐等[2],其中多波束渔用声呐作为复杂度高、技术含量高的助渔仪器,可以获得更远的空间探测距离和更高的角度分辨能力[4-7],在远洋渔业拖网、围网捕捞对鱼群的探测中有着广泛的应用,可以大幅度提高远洋渔业捕捞效率,也为未来海洋渔业精准和选择性捕捞提供了技术手段[8-10]。目前,中国多波束渔用声呐仅有部分样机开展试验性海上测试,还没有可大规模装备渔船的商用仪器,极大地限制了中国海洋渔业捕捞效率和发展深度[11-12]。随着中国在微电子、换能器材料、水声图像处理等新型技术领域的快速进步,带动一大批渔用声呐相关行业的发展,这必将为开展多波束渔用声呐关键技术攻关和自主研制创造了条件[10-12]。
考虑到渔用声呐实际部署条件,尤其是渔业船舶吨位和长度,多波束渔用声呐换能器基阵尺寸受到限制,基阵的孔径设计不能任意增大[13-14]。在换能器基阵尺寸一定的条件下,采用相对较低的工作频点,将有助于减少传播损失,但这同时会降低阵列指向性和增大环境噪声,从而综合影响到多波束渔用声呐的探测性能[15]。在对渔用声呐性能的分析中,垂直渔用声呐主要分析上述噪声的影响,便可以选取主要设计参数及评估渔用声呐性能[16-19],然而多波束渔用声呐通常用作在一定倾角下的水平扫描探测,水平探测距离不仅受到噪声的影响,还受到界面混响和体积混响的影响,特别是远距离多波束渔用声呐换能器基阵直径通常在0.3~0.5 m之间,工作频段在15 kHz~40 kHz之间[13],受到噪声和混响的混叠影响作用,对多波束渔用声呐研制过程中工作频点的选择、换能器基阵尺寸的确定及作用距离的预测等都会带来较大的困难。
本研究从主动声呐方程出发建立了多波束渔用声呐作用距离的预报模型,对换能器基阵尺寸、渔用声呐最优工作频点和最大探测距离3者之间的相互制约关系进行了仿真分析。首先在给定换能器基阵尺寸下,对不同工作频点下的噪声限制距离和混响限制距离进行了对比分析,并综合确定最优工作频点;之后,对于不同换能器基阵尺寸的最优工作频点及最大探测距离进行了分析,并给出了最大探测距离下的换能器基阵尺寸与最优工作频点的对应关系。
1 多波束渔用声呐基本原理及工作过程
渔用声呐原理是采用多波束技术,利用鱼群对声波的反射,来探测鱼群信息的仪器。鱼群密度、大小和种类等信息可以通过对回波信息的特征分析获取。多波束渔用声呐是采用换能器基阵中多个阵子发射和接收信号进行相位控制,来实现发射和接收信号具有更高的指向性、更小的波束角,达到更远距离、高分辨率探测的能力[8-9,20]。
如图1所示,多波束渔用声呐由换能器、信号处理主机、显控主机及升降机构组成。当进行鱼群探测时,升降机构将换能器降到保护罩以下,换能器负责水声信号和电信号的转换。多波束渔用声呐通常采用多种形式的换能器基阵,如线型、平面型、圆柱型等[20]。圆柱型渔用声呐换能器基阵能够实现水平全方位扫描,以及垂直近60°扫描,接近达到了以渔船为中心的三维空间整体扫描能力,在航行状态下可以实现无盲区探测。船员根据作业时探测目标特性、海况、天气等因素设置渔用声呐探测参数。信号处理主机根据相应参数进行发射和接收探测信号并进行相应信号处理,解算出探测结果目标数据,上传到显控主机。

图1 多波束渔用声呐系统组成Fig.1 The system configuration of a multi-beam fishery sonar
如图2所示,由于硬件条件的限制,多波束渔用声呐发射和接收过程有所不同。在定向发射过程中,采用定向旋转方式,即在一个探测发射周期内,为了提高分辨率、集中能量轮流一次发射不同方位的窄波束去覆盖一个扇形探测区域,发射波束密集,信号覆盖越均匀,同时,探测盲区越大,系统也越复杂。在接收过程中,基阵中多阵子同步接收回波信号,并通过移相来形成多个接收波束,达到更高的分辨率和更远的探测距离的目的,实现对被探测鱼群方位的确定。
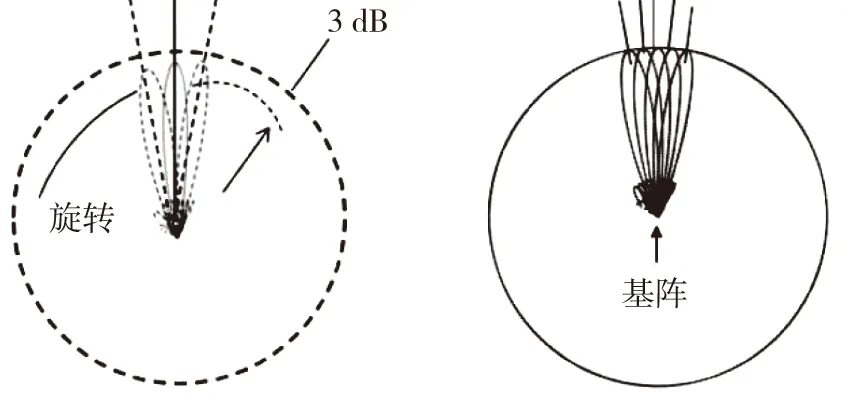
图2 多波束渔用声呐发射/接收过程示意图Fig.2 Schematic diagram of transmitting/receiving process of multi-beam fishery sonar
2 作用距离预报模型及主要约因素
渔用声呐作为一种主动声呐技术在渔业中具体应用,其探测性能依据噪声和混响限制条件可以分别表述为下列主动声呐方程形式[21]:
主要工作在噪声干扰条件下:
SE=SL-2TL+TS-NL-DT
(1)
主要工作在混响干扰条件下:
SE=SL-2TL+TS-RL-DT
(2)
式中:SE为信号余量,dB;SL为声源级,dB;TL为传播损失,dB;TS为目标强度,dB;NL为环境噪声,dB;RL为混响级,dB;DT为检测域,dB。
2.1 水声信号在海水中的传播损失
水声信号在海洋声信道中传播,由于声波阵面的扩展,和传播距离的增加带来的损失称为扩展损失。多波束渔用声呐一般使用在较深水域,这里以球面扩展法则来计算扩展损失[22]:
TL扩=20lgr
(3)
式中:r为传播距离,m。TL扩为以声源等效身中心为原点,传播距离为半径,声波扩展带来的损失。
海水质点通过振动来依次传递声波能量。由于阻尼在振动时的作用,声波在海水中有部分能量会转化为热能,消耗产生的损失为吸收损失,表示为[22]:
TL吸=α(f)×r
(4)
式中:TL吸表示吸收损失,TL吸与频率和距离有关;α为海水吸收系数,dB/km,与信号频率f有关[22]。

+0.003
(5)
式中:f表示信号频率,kHz。
综上,水声信号在海水中的传播损失主要来源于上述两方面传播损失之和,表示为[22]:
TL=20lg(r)+α(f)×r
(6)
2.2 海洋环境噪声
噪声作为渔用声呐工作过程中的主要干扰因素之一,其来源包括:热噪声、环境噪声和自噪声等。海洋环境噪声是干扰水平渔用声呐有效探测距离的主要因素之一,由风浪、湍流及海水分子的热运动等产生。海况和频率直接影响深海噪声谱级SPL的强弱,如:渔用声呐常用频段(15 kHz~ 200 kHz)在6级海况下的噪声谱级比1级海况下高出20 dB。6级海况下深海噪声谱级SPL的经验公式为[23]:
SPL=52-20lg(f/103)
(7)
有指向性系统下宽带噪声级为[24]:
NL=SPL+10lgB-DI
(8)
式中:B表示信号带宽,kHz;DI表示基阵的指向性指数,dB。
2.3 圆柱型换能器基阵指向性
为了实现水平360°电子扫描,更高的探测效率和使用灵活,本多波束渔用声呐采用圆柱型阵。圆柱型基阵的指向性指数约为[24]:
DI=10lg(5×h×D×f2)
(9)
式中:h和D分别为圆柱型基阵的高度和直径,单位均为m。
如果渔用声呐工作采用单扇区,水平方向采用1/3周长上阵子进行发射和接收,其水平和垂直波束的半功率弧度开角分别为[24]:
θh=88×2π/360×D×f
(10)
θv=76×2π/360×h×f
(11)
式中:θh和θv分别表示水平和垂直波束的半功率开角,rad。
2.4 界面和体积混响级
水声信号在传播过程中,海面和海底对它的反射会在接收端产生界面混响,界面混响级公式为[24]:
RLS=SL-2TLR+Sb+10lgA
(12)
海水中分布的生物和无生命物质以及海洋自身的不均匀性会产生体积混响,体积混响级为[24]:
RLv=SL-2TLR+Sv+10lgV
(13)

2.5 发射声源级
在恒定发声功率P下的水平渔用声呐声源级,可以表示为[24]:
SL=10lgP+170.8+DI
(14)
式中:P为声功率,单位是W。
2.6 单体鱼和鱼群的目标强度
研究鱼类的声学目标强度,可以分别从单体鱼的目标强度和鱼群的目标强度来分析。通常单体鱼的目标强度定义为[25-27]:
TS单=20lg(σbs/4π)
(15)
式中:σbs为鱼体的声学截面,m2,TS单可以理解为鱼体对入射声波产生的散射,与鱼体的声学截面积有关。由于无法直接测量入射声波在鱼体产生散射的等效面积,建立了目标强度与体长相关的经验公式[25-27]:
TS单=algL+b
(16)
式中:L为目标鱼体体长,cm;a、b为回归系数,其可以根据目标强度测定实验确定。
多波束渔用声呐的主要探测目标是鱼群。当平面探测声波指向鱼群且鱼群处在声波覆盖范围内时,鱼群的回波可视为各条单体鱼反射波按相位叠加的总和。如果仅简单考虑同相位叠加的情况,2条鱼的回波声强要比单体强1倍,即反射损失少3 dB,4条鱼的回波声强增强为单鱼的4倍。由此可以推论,处在投射声场范围内,由n条相距较大的鱼所构成的平面散射鱼群,其中总的目标强度为[14,20,25]:
TS=TS单+10lgn
(17)
如果被探测目标为一定容积的密集鱼群,情况则变得较为复杂,由于鱼群反射性质上的改变,这时鱼群反射强度大致与每立方米中的鱼数成正比[20,25]。
2.7 检测阈
渔用声呐检测阈值的计算方法可以表示为[24]:
DT=5lgd-10lg(BT)
(18)
式中:d为检测指数;BT为信号的脉宽和带宽,s。
3 最优频点选取及探测性能仿真分析
3.1 仿真参数设置
多波束渔用声呐的探测性能主要受限于其使用频点、带宽、换能器基阵尺寸及阵子数量等因素,而换能器尺寸和发射功率又受到部署渔船的条件制约,对于不同条件下多波束渔用声呐最优工作频点及其最大探测性能存在一定差异。最优工作频点的选取主要考虑两点:一是在换能器基阵尺寸给定条件下,实现最大作用距离的工作频点;二是在最大探测距离给定下,实现最小换能器基阵尺寸的工作频点。结合中国远洋渔船具体特点及典型多波束渔用声呐现状,采用的探测性能仿真参数如表1所示。

表1 多波束渔用声呐探测性能仿真主要参数Tab.1 Main parameters for simulation of detection performance of multi-beam fishery sonar
3.2 不同干扰下的信号余量分析
在噪声影响下,将式(1)展开
SE=SL-2TL+TS-(SPL+10lgB-DI)-[5lgd-10lg(BT)]
(19)
化简为:
SE=2DI-2TL-SPL+NA
(20)
式中:NA=10lgP+170.8+TS-5lgd+10lg(T)为常量。
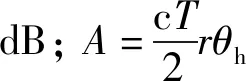
SE大小与DI、TL、SPL变化有关,但工作频点变化时3个参数随之变化,如图3所示,随着频率的增加DI和TL变大,而SPL变小,对SE的影响有所不同;同时,基阵尺寸的改变也将影响指向性DI的改变。假设在基阵尺寸固定的情况下,这里存在最优工作频点求解问题。
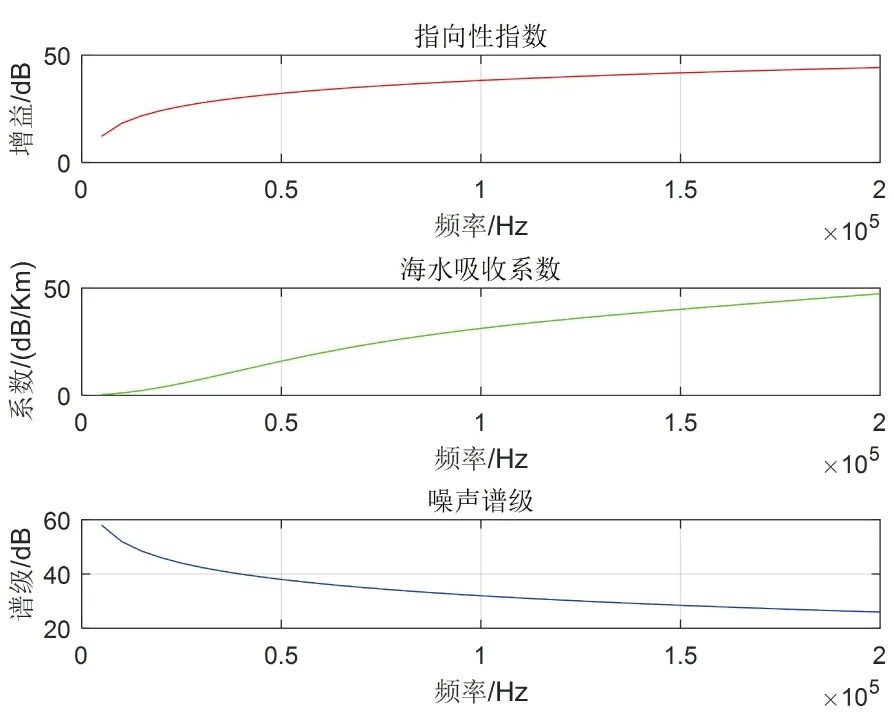
图3 频率变化对主要参数的影响Fig.3 The influence of frequency variation on main parameters
在界面混响影响下,将式(2)展开
SE=SL-2TL+TS-(SL-2TL+Sb+10lgA)-[5lgd-10lg(BT)]
(21)
化简为:
SE=-10lgθh+SbA
(22)
同理,在体积混响影响下可化简为:
SE=-10lgθhθv+SvA
(23)

随着频率的增加,等效平面角10 lgθh和等效立体角10 lgθhθv会相应地减小,导致在界面混响和体积混响影响下,对应的信号余量也会相应地增加,又由于等效体积角相较于等效平面角随频率增加减少得更快,因此,提高频率可以明显地降低体积混响对渔用声呐性能的影响。
多波束渔用声呐的最优工作频段通常工作在混响和噪声混叠干扰区域,因此,对最优工作频点的判断需要综合考虑两者的影响。
3.3 换能器基阵尺寸、最优工作频点和最大作用距离3者关系分析
由于渔业船舶一般相对较小,渔用声呐部署空间有限,决定了渔用声呐换能器阵尺寸往往受到一定限制。这里通过仿真不同渔用声呐换能器基阵尺寸下的最优工作频点及该频点下的最大作用距离,明确换能器基阵尺寸、最优工作频点和最大作用距离3者之间的相互关系。为了方便分析,这里假设换能器高度与直径相等。由图4可见,随着换能器基阵尺寸的增加,最优工作频点在降低,而最大作用距离在不断增加。因此,在渔用声呐部署条件允许的情况下,尽量增加换能器基阵尺寸,可以有效提高渔用声呐的探测性能。

图4 不同换能器基阵尺寸下的最优频点选择和最大作用距离Fig.4 Optimal frequency and maximum operating distance with different transducer array sizes
在某些应用场景,渔用声呐的最大作用距离是一定的,这就需要确定换能器基阵最小尺寸时的最优工作频点。如图5所示,实现最小换能器基阵尺寸的渔用声呐最优工作频点,随最大作用距离的增加而降低。

图5 给定最大作用距离下最优工作频点Fig.5 Optimal working frequency under given maximum operating distance
3.4 最优工作频点及最大作用距离分析
这里从以中层拖网渔船的使用需求出发,在固定换能器基阵尺寸的基础上来寻找达到渔用声呐最大工作距离的最优工作频点。参考挪威Simrad公司SX90多波束渔用声呐换能器基阵尺寸:高h=0.356 m,直径d=0.374 m,进行仿真分析。
换能器基阵尺寸一定的条件时,如图6所示,在不同距离上,随着频率的增加混响干扰下的信号余量逐渐最大,但噪声干扰下的信号余量存在先增加后下降的情况。令SE≥ 0 dB,可以检测到目标,在距离1 km处工作频率10 kHz~200 kHz均可以满足要求;在距离2 km处工作频率20 kHz~40 kHz才能满足要求;在距离3 km仅有小部分频点(25 kHz附近)接近满足要求;在距离4 km均不存在3条信号余量曲线同时大于0 dB的情况,所以在该换能器尺寸条件下不能检测到目标强度为TS=0 dB的目标。可见在给定换能器基阵尺寸条件下,最大作用距离是已经确定下来了,我们设计过程更多的是需要考虑选用合适的频段,来实现所研制渔用声呐系统的最大距离。

图6 不同距离上信号余量随工作频点的变化Fig.6 Variation of signal margin with frequency at different distances
图7给出了噪声、界面混响和体积混响干扰影响下的渔用声呐最大作用距离,可见在换能器基阵尺寸固定情况,界面和体积混响干扰条件下最大探测距离随着频率的增加而增加,其中体积干扰的改善更为明显;而噪声干扰下最大作用距离随着频率的增加先增加后降低,存在最大作用距离求解问题。由可见,噪声干扰下最优工作频率处界面混响限制距离小于噪声限制距离,因此,此时的噪声限制下最大距离对应频点并不是渔用声呐系统最优频点,最优频点选取需要寻找共同满足噪声限制距离和混响限制距离综合最大处的频点。
图7 不同干扰影响下的最大作用距离Fig.7 Maximum operating distance under different interferences
由仿真结果可见,渔用声呐的最大作用距离,在15 kHz以下频段以界面混响影响限制为主,在40 kHz以上频段以噪声影响限制为主,而在15 kHz~40 kHz频段受噪声和混响共同影响。同时满足上述3个余量要求的最优频点为25 kHz,对应的最大作用距离为2 600 m。
4 其他影响因素
4.1 海洋环境因素
本研究假设渔船在一定的海深、底质和水体的条件下作业,这些条件决定了仿真过程中的信号扩展损失、体积散射强度和海底散射强度等具体参数值,而实际中渔船可能在不同海域作业,可以在仿真中更多考虑不同的参数,运用多重优化算法,选取适应性更强的参数。
4.2 宽带因素
上述分析均基于窄带系统,在最优频点附近10 kHz带宽范围内各频点的作用距离小于400 m,如果设计宽带渔用声呐,可以参考选取带宽10 kHz左右。然而如果采用宽带系统,混响影响也会降低,可以适当多选取低于最优频点的频段。在宽带条件下,不同频带带宽对最优参数选取的影响有待进一步分析。
4.3 捕捞作业方式因素
不同的作业方式对最大探测距离的需求也不相同,如中层拖网需求在4~6 km。追求更远的探测距离,会占用大空间的渔船舱体,造成有限的渔船舱体空间浪费。因此,对于渔用声呐的研制应从拟部署渔船的作业类型和特点出发,在换能器基阵尺寸、最优工作频点和最大作用距离3者之间权衡最优的参数配比。
5 结论
通过对噪声和混响影响条件下多波束渔用声呐最大工作距离、换能器基阵最小尺寸及最优工作频点3者关系的仿真分析,给出了圆柱阵多波束渔用声呐最优工作频点选取方法及探测性能,分别对噪声和混响影响条件下的探测性能进行评估;提出了多波束渔用声呐在部署条件或使用场景确定下的最优化频点选取方法,并评估了不同情况下的渔用声呐探测性能,具体明确了适用于远洋捕捞场景中的换能器直径在0.375 m,针对0 dB目标鱼群的最大探测距离为2 600 m,最优工作频点应选取为25 kHz,本研究为后续自主进行装备研制、测试和试验提供了理论指导。
□
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
无损检测(2022年1期)2022-03-16
空军工程大学学报(2021年2期)2021-05-29
数字海洋与水下攻防(2020年5期)2021-01-04
中国新通信(2020年3期)2020-07-06
水下无人系统学报(2020年1期)2020-03-06
海军航空大学学报(2019年1期)2019-04-29
通信产业报(2016年46期)2017-03-10
现代兵器(2016年12期)2016-12-22
移动通信(2014年18期)2014-11-04
