织物综合触感风格的视触觉模态整合
2021-12-04 05:34熊巧玲陆东东杜赵群
纺织科学与工程学报 2021年4期
熊巧玲,刘 贵,陆东东,杜赵群
(1.东华大学,产业用纺织品教育部工程研究中心,上海 201620;2.福建省纺织产品检测技术重点实验室(福建省纤维检验中心),福建 福州350026;3.福建省运动鞋面料重点实验室(福建华峰新材料有限公司),福建 莆田 351144)
在纺织服装领域,织物综合触感风格是织物固有的物理机械性能在人脑的综合反映[1-2]。织物的触感对纺织服装整体的舒适度有着重要影响。一般来说,当皮肤表面与织物间发生接触时,人们可以感知织物的触感。但在日常生活中,当用手触摸感知评估材料属性时,通常会伴随着视觉信息的输入,有时还会有声音信息。在判断物体的大小、形状和位置时,视觉信息通常占主导地位,但在有些情况下触觉信息也会很大程度上影响判断的结果。大多数事件都可以同时传递多种线索,而大脑可以通过不同的感官通道接收相应信息。有效地将不同感觉通道的线索信息合并为统一,连贯且强烈的感知的过程称为多个感觉通道线索的知觉整合,也称多感觉整合[3-4]。对于织物综合触感风格客观评价的研究,最具有代表的是川端季雄将织物的力学特征与感官评价相联系及建立了KES-F织物风格评价系统[5],并提出了综合触感风格与基础触感风格的概念。根据织物的基础触感风格,例如光滑度、柔软度、硬挺度等可以得到织物的综合触感。有许多的研究专门研究视觉和触觉中的柔软度和粗糙感的不同模态感知[6-9],但是对于织物综合触感的研究很少。国内外已有研究表明,视觉和触摸在许多粗糙度和柔软度识别任务上都是有效的。但是,鲜有证据表明同时使用两种感官可以提高辨别力。对于织物的粗糙度,多感觉模态是否能将粗糙度信息进行整合尚不明确。有学者认为视觉和触觉可以从本质上向感知系统提供相同的粗糙度信息。如果是这样,则没有必要进行集成,因为将注意力转移到任何一种方式都可以使感知者提取所有相关数据[10]。目前几乎没有人尝试对织物综合触感判别多模态感知进行建模。因此,本文重点研究以下两个问题:(1)视、触觉双模态下的织物综合触感与单模态下织物综合触感的差异;(2)多模态织物综合触感整合模型。
1 实验
1.1 试样准备
挑选了15块不同触感风格的机织面料,面料以涤纶和涤棉混纺为主,并且其触感风格具有一定的代表性和相对可比性。面料的基本参数如表1所示。将布样熨烫平整并在标准大气条件下平衡24h。在布样的经向、纬向和45°方向各裁剪三块50cm×5cm的长条用于织物物理指标的测试。同时裁剪20cm×20cm的正方形用于主观评价。
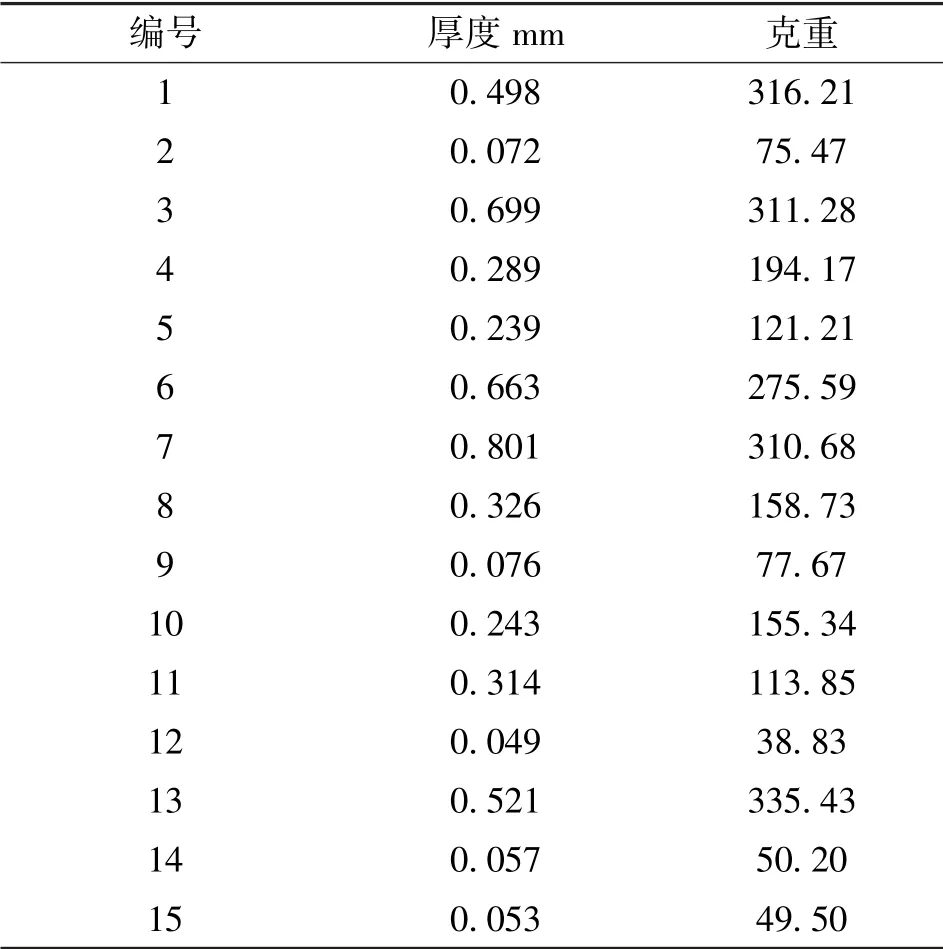
表1 面料基本规格参数
1.2 物理指标测试
为了定量描述织物的综合触感,本文章采用由东华大学纺织材料与技术团队和南通宏大实验仪器有限公司共同研发的CHES-FY纺织材料手感风格仪[11-12](以下简称CHES-FY风格仪)测试织物的物理指标。该仪器基于三点梁弯曲原理,可通过单次测量获得织物的压缩、弯曲、摩擦、剪切性能。测试过程如图1所示。在测厚阶段,左压辊在织物放置前后分别接触基准板和织物一次,由此得到织物厚度,压力辊继续缓慢下降至设定的压缩力值完成压缩阶段。弯曲阶段,压力辊上移同时运动压板缓慢下降到设定弯曲位移。摩擦阶段,左右压力辊同时下移给予织物两端一定压力值,运动压板继续下移,使压力辊与织物间产生摩擦阻力。拉伸阶段,左右压力辊压力增大防止织物滑移,运动压板继续下降使织物被拉伸。从整个测试过程所得的位移-力值曲线可得到表2所示的物理指标。其中TSF表示织物抵抗压缩变形的能力,可用于表征织物的丰满程度。SST表示织物抵抗弯曲变形的能力,可表征织物的柔软程度。FSM和SLT分别表示织物抵抗摩擦变形及拉伸变形的能力,可分别表征粗糙度和松紧度。
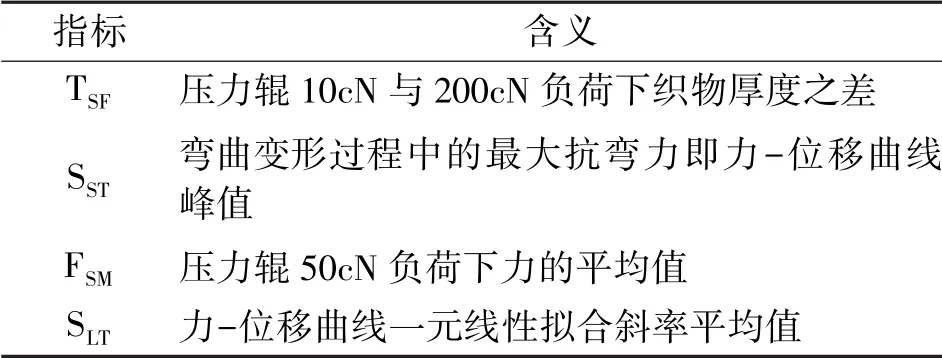
表2 CHES-FY物理指标的含义
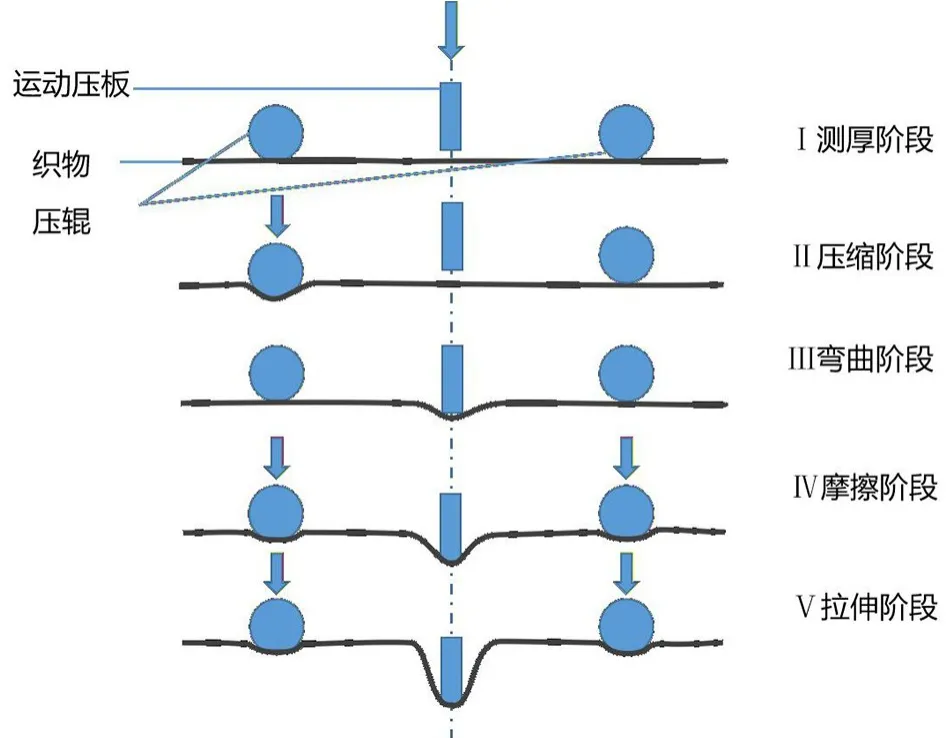
图1 CHES-FY测试过程示意图
1.3 主观评价
评价人员为35位东华大学纺织学院在读学生,年龄在20~30岁之间。5位人员对所选15块试样进行触感评分,评分范围为0~10。另外30位进行不同模态的选择实验。在进行测试之前,对35名受试人员进行培训,让他们熟悉测试流程以及方法,告知受试人员从多维感知试样的接触舒适程度(忽略接触冷暖感),综合感受到的粗糙感、柔软感等作出判断。在进行评价前,受试人员事先用相同的肥皂洗净手并擦拭干。试验在温度为20℃,相对湿度为65%的安静且明亮的环境中进行。5位主观触感评估小组对15块试样进行评级,小组人员使用相同的手势,如下页图2所示:(1)左手按住织物左侧,右手从左到右抚摸织物(2)用右手食指托起织物然后用拇指按压;(3)用右手将织物抓起并捏压几次;(4)左手右手各持织物的两边拉扯几次。将5人所评分数的平均值作为最终的主观评价结果。

图2 触摸手势
进行不同模态选择实验时,为了避免触摸过程中织物摩擦发出声音的影响,受试人员需带上耳塞。评价依次由触觉单模态,视觉单模态,视触觉双模态顺序进行。触觉单模态及视触觉双模态评价时,所有受试人员使用越图2相同的手势。试验过程中同时向被试人员随机呈现两块织物,其中一块触感适中的织物作为为参照织物,被试人员通过比较参照织物和待评试样,判断待评试样的触感是否更为舒适。若更舒适,对实验者说1,若没有参照试样舒适,则说0。
进行触觉单模态评价时,将织物放进如图3所示的黑箱中,被试人员可将通过黑箱开口处触摸织物。评价完成后将黑箱移除,被试人员视线垂直于织物平面,距离约为20cm,同时作者按照图2的触摸手势触摸织物,让被试人员进行观察,进行视觉单模态的评价。为了消除视觉记忆的影响,视触觉双模态评价在视觉单模态评价后一周再进行,试验条件与视觉评价时相同。

图3 不同模态下的评价方法
2 结果与分析
2.1 综合触感指数与双模态评价结果相关性
在温度为20℃,相对湿度为65%的条件下,CHES-FY可测得所选15块织物的压缩性能、弯曲性能、摩擦性能及拉伸性能。TSF越高表示织物越丰满度,SST越低表示织物越柔软,Fsm越高表示织物越滑爽,SLT越高表示织物越紧实。可以根据公式(1)[13]算得织物的综合触感指数CH,CH越高表示织物的综合触感越好。

主观评价结果L与CHES-FY测试结果如表3所示。
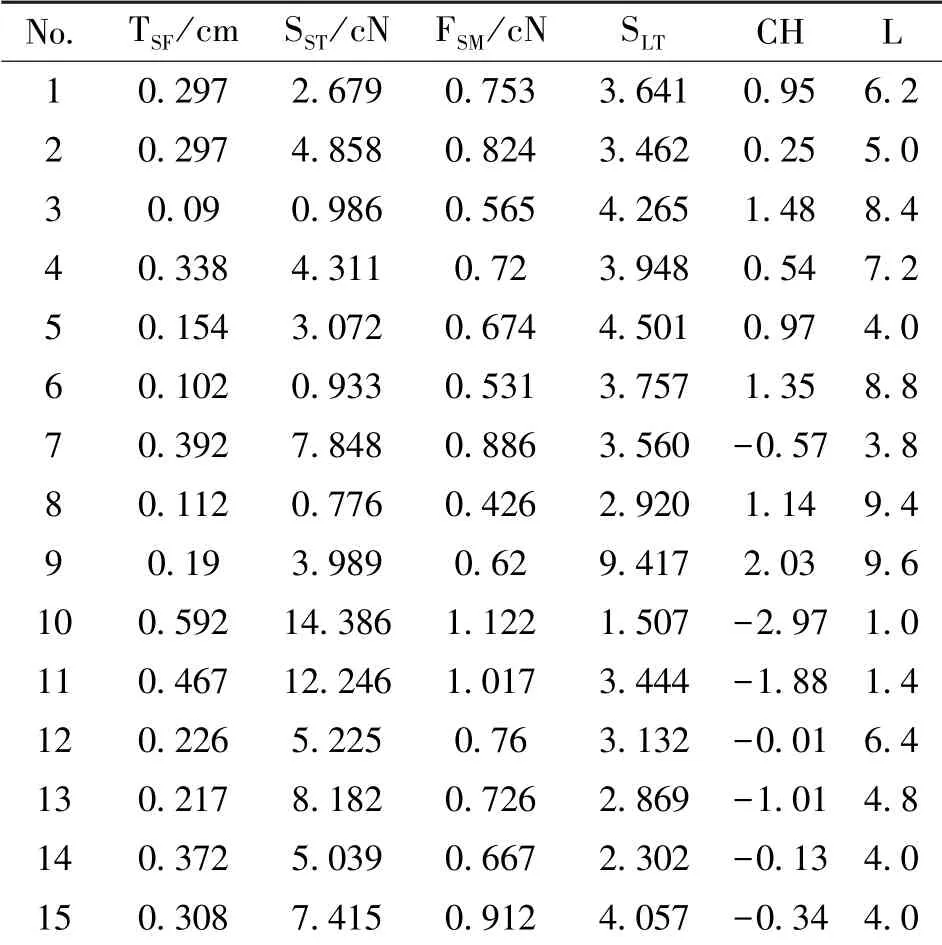
表3 主观评价及CHES-FY测试结果
为了验证由CHES-FY所测试结果与主观感知的相关性,将综合触感指数与主观评级值进行皮尔逊相关性分析。相关系数为0.879,显著性P值为0,说明综合触感指数与主观评级之间具有极其显著的统计效果且高度正相关。
2.2 心理测量函数
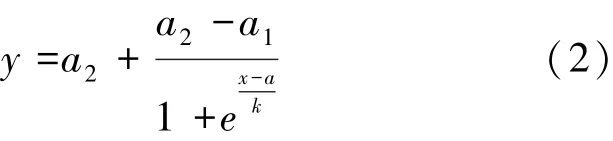
心理物理学研究的是心理量与物理量之间的关系,定量描述这种关系的函数被称为心理测量函数[14-15]。以物理刺激量为横坐标,以能正确识别物理刺激的百分数为纵坐标的心理测量函数一般情况为下S型曲线[16-17],心理测量函数中最常研究的是斜率和阈限。阈限分为两种,一种是绝对阈限,指刚好能引起心理知觉的刺激值,通常把有50%的次数被察觉道的刺激值定义为绝对阈限;另一种是差别阈限,指在已有知觉的基础上增加或减少刺激量时能被察觉到的最小差异量,即50%的次数能辨别出差别感觉的两个刺激强度之差,又别称为最小可觉差(JND)。本文以综合触感指数差值ΔCH为自变量,识别正确率P为因变量建立心理测量函数,并采用Boltzmann函数拟合,拟合关系式为公式(2)
由表3可知编号为2的试样在所选15块试样中的综合触感是适中的,所以在进行选择实验时,将试样2作为参照试样,将待评试样的综合触感指数与参照试样的综合触感指数之间的差值记为ΔCH。表4是各试样的ΔCH以及在不同模态下感知织物综合触感的正确识别率。PH、PV、PVH分别代表触觉单模态、视觉单模态、视触觉双模态下的正确识别率。
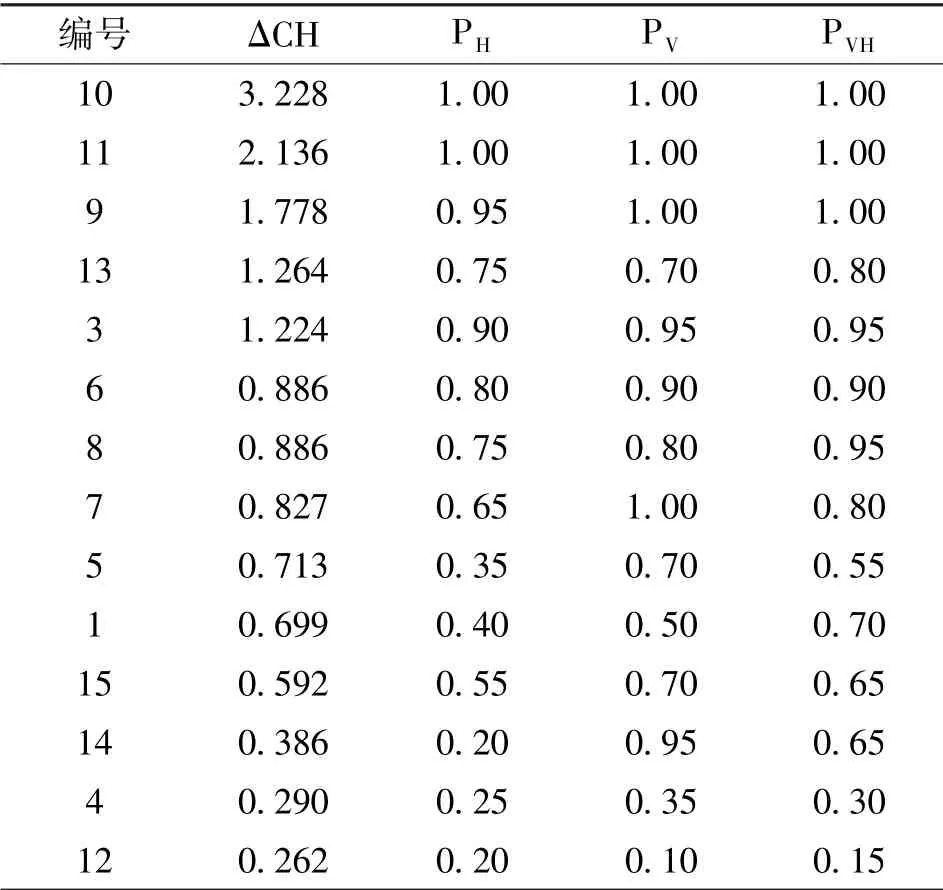
表4 试样的综合触感指数及不同模态下的识别率
由表4可以看到试样14和7的ΔCH分别0.386和0.827,但是在视觉单模态下正确识别率却能达到0.95和1.00。这可能是由于仅仅靠视觉单模态进行选择实验时,试样的纹理图案比较受被试者关注。14的经纬纱线比较粗,同时经纬密较小,视觉上给人非常粗糙的感觉,但实际感觉是松软的。7有丝绸光泽,视觉上也非常舒适。在进行拟合时,剔除这两个相对异常的数据点。图4为不同模态下的心理测量函数的拟合曲线。
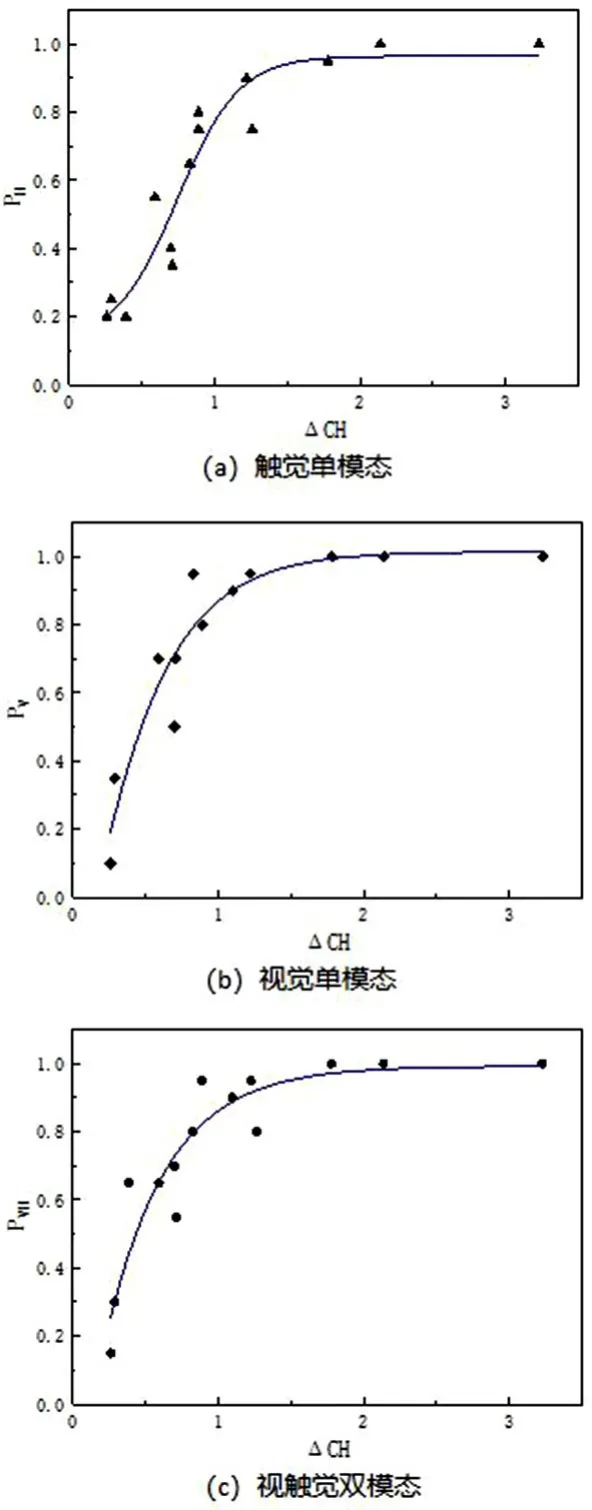
图4 不同模态下的心理测量函数
(a)为触觉单模态的心理测量函数,参数a1=0.126,a2=0.965,a=0.74521,k=0.21118且拟合优度为0.880,F检验表明拟合方程在0.05水平显著。根据拟合所得方程将y=0.5代入,得到触觉单模态下的差别阈限0.474。(b)为视觉单模态的心理测量函数,参数a1=-4.044,a2=1.014,a=-0.383,k=0.393且拟合优度为0.858,F检验表明拟合方程在0.05水平显著。根据拟合所得方程将y=0.5代入,得到视觉单模态下的差别阈限0.697。(c)为视触觉双模态的心理测量函数,参数a1=-2021.495,a2=0.993,a=-3.123,k=0.428且拟合优度为0.825,F检验表明拟合方程在0.05水平显著。根据拟合所得方程将y=0.5代入,得到视觉单模态下的差别阈限0.434。拟合结果表明,视触觉双模态下的差别阈值最小,同时触觉单模态下的差别阈值小于视觉单模态下的差别阈值。视觉单模态可以在一定程度上判断织物的综合触感,但是使用触觉单模态的感知结果与实际结果更接近,视觉对综合触感的感知有增强效果。
2.3 视觉、触觉贡献度计算
当一个人用手探索一个物体时,视觉和触觉都为估计物体的属性提供了信息。视觉经常支配着综合的视觉-触觉感知,例如在判断大小、形状或位置时。但在某些情况下,感知又明显受到触觉的影响。为了确定在判断织物综合触感时视觉或触觉占主导地位的程度,在本文中采用极大似然估计模型(MLE)[18-20]计算视觉和触觉对于织物综合触感感知强度的贡献度。

感官系统对环境属性的估计可以表示为其中S是被估计的物理性质,f是神经系统进行估计的操作。下标指的是模态。每一种感官模态都夹杂着噪音,假设每种模态下噪音独立且符合高斯分布,同时先验概率是均匀的,那么MLE模型可表示为
式(4)中wi表示多模态整合时某种模态所占权重,σi2是感知方差,权重系数为归一化后方差的倒数。采用该模型来表示视触整合,那么视触感知的方差可以表示为
同时权重系数、方差以及由心理测量函数所得的差别阈值T有以下关系,并且wV+wH=1
根据式(5)和(6),最终视觉模态和触觉模态的预测权重系数为

将2.2中心理测量函数所得差别阈值TH=0.474,TV=0.697代入式(7)计算得到wH=0.68,wV=0.32。
当我们同时用视觉和触觉进行织物综合触感的感知时,输入大脑的视觉和触觉信息会按照类似最大似然的方法进行整合,而根据MLE所计算出的权重,可以定量地表示视觉和触觉在感知过程中各自的贡献度。从计算结果可以看出,触觉在感知中占主导地位,这与我们的经验也是相符合的,但是实际上视觉也是在一定程度上增加了感知强度。
3 结语
基于CHES-FY系统所得的织物综合触感指数,研究了被试人员在触觉单模态、视觉单模态以及视触觉双模态下对织物综合触感评估的心理测量函数,并计算了在视触觉双模态下感知织物综合触感时,各模态所占主导地位的程度。结果表明,根据CHES-FY系统所得综合触感指数与主观评价结果具有很强的相关性,使用综合触感指数可以很好地表征织物综合触感。织物综合触感的心理测量函数服从Boltzmann模型,并且在视触觉双模态下的差别阈值最小,在视觉模态下的差别阈值最大。在视触觉双模态下的感知强度中,视觉模态和触觉模态分别占0.68和0.32。可以看出视觉和触觉在织物综合识别任务上都是有效的,但是,触觉模态更有主导性,并且同时使用两种感官可以提高辨别力。几乎没有人尝试对织物综合触感判别的多感官感知进行建模,然而探究人类对织物综合触感的多感官感知的机制可以促进虚拟织物的开发,对于人机交互也有极大的意义,多模态的人机交互可以更准确、更快速地完成任务。
猜你喜欢
材料与冶金学报(2022年2期)2022-08-10
纺织科学研究(2021年7期)2021-12-02
小资CHIC!ELEGANCE(2021年40期)2021-11-08
海外星云(2021年6期)2021-10-14
纺织科技进展(2021年5期)2021-07-22
发明与创新(2021年17期)2021-07-05
特别健康(2018年3期)2018-07-04
小布老虎(2017年2期)2017-07-31
北方音乐(2017年4期)2017-05-04
中国工程咨询(2016年2期)2016-02-14