
天问一号火星探测器EDL过程自主导航技术
2022-03-25 02:49李茂登黄翔宇郭敏文胡锦昌刘旺旺王晓磊徐李佳王云鹏
宇航学报 2022年1期
李茂登,黄翔宇,徐 超,郭敏文,胡锦昌,赵 宇,刘旺旺,王晓磊,徐李佳,王云鹏,郝 策
(1.北京控制工程研究所,北京 100094;2.空间智能控制技术重点实验室,北京 100094)
0 引 言
火星探测是深空探测的热点之一,研究火星的磁场、大气、气候以及地质、地貌等,对于研究火星的形成和演化,探索生命的起源等具有重大的科学意义。中国首颗火星探测器天问一号通过一次发射实现了火星环绕、着陆和巡视的全部目标。火星进入、下降和着陆过程(Entry, descent, and landing, EDL)是火星着陆探测任务最为关键的阶段,该阶段直接影响任务的成败。火星EDL过程分为气动减速、伞降减速和动力减速三个阶段,其中气动减速段包括攻角配平段和升力控制段,主要利用火星大气进行减速并飞向预定开伞点。这一阶段从着陆巡视器(后文简称为着陆器)进入大气层(高度约为125 km)开始,到打开降落伞为止。在这期间,着陆器利用气动外形进行减速控制,期间要经受严酷的气动加热和过载环境考验,为了保护着陆器免受恶劣环境的影响,需要将着陆器安装在防热罩内。在伞降减速段,着陆器将借助伞的作用力进一步减速,并抛掉防热大底(简称大底)。一旦减速至降落伞的稳降速度,则抛掉降落伞(又称背罩),转入动力减速段。在动力减速段,轨控发动机开始工作,进行主动减速控制并规避伞-背罩组合体和地形障碍,最终以预定的速度和姿态软着陆于火星表面。
着陆器制导、导航与控制(Guidance, navigation, and control, GNC)分系统是负责实施EDL过程任务的主要分系统,通过多种减速机制,控制着陆器以预定的姿态和速度着陆于火星表面。火星EDL过程时间紧(仅7~10 min)、所有动作不可逆、环环相扣,受地-火大通信延时(此时火星距离地球约3×10km,地火双向通信时延长达36 min)的影响,GNC分系统需要实现完全自主决策和控制。而准确可靠的自主导航估计是实现完全自主决策和控制的基本前提。火星EDL过程为动力飞行过程,因此其自主导航主要依赖于基于惯性测量单元(Inertial measurement unit, IMU)的惯性自主导航。惯性自主导航系统在进入火星大气前进行位置、速度和姿态初始化,然后利用IMU的三轴陀螺和加速度计分别测量着陆器的惯性角速度和非引力加速度,再结合引力模型,可以对惯性状态进行解算。受初始条件、IMU测量误差以及动力学模型的影响,惯性导航的误差会随着时间累积而发散。此外,惯性导航也难以获取相对火星表面的状态信息。这就需要借助相对导航敏感器对惯性导航误差进行修正,并提供相对于火星表面的精确状态。由于大底的遮挡作用,这些相对导航敏感器只有在抛掉大底以后才开始工作。可供选择的成熟敏感器有测距测速敏感器和成像导航敏感器,其中测距测速敏感器一般仅对高度和速度进行修正,无法提供水平位置的精度估计,成像导航敏感器可以实现三维位置、速度以及姿态的修正。显然,和成像导航敏感器相比,测距测速敏感器难以满足定点着陆任务的需求,但是其技术相对成熟,星上计算量相对较小,无需事先存储高精度的地形地图,是现有绝大多数深空探测任务着陆阶段的主流导航方式。对于月球、火星大天体探测任务而言,除了美国的火星2020任务采用了基于成像导航敏感器的地形匹配导航技术,其余探测任务都无一例外的采取的是IMU配以测距测速的导航方式。天问一号是中国首次实施的火星探测任务,着陆目标是保障安全着陆,而非定点着陆,因此天问一号探测器在充分继承了中国嫦娥工程的导航方案基础上,采取的是惯性导航/惯性导航+测距测速修正的导航方案,其中在抛大底以前仅依赖于纯惯性导航,抛大底后采取的是惯性导航+测距测速修正。应当指出的是,尽管天问一号探测器没有采用地形匹配导航,但是它仍然需要借助于成像导航敏感器去选择安全着陆点,进行自主避障,并实现相对着陆点的相对导航,这和嫦娥系列的月球软着陆任务也类似。
火星EDL过程的大动态、强不确定性给导航系统的设计带来了新的挑战。首先,由于开伞(马赫数大于1.4)存在喘振现象(降落伞在第一个充气载荷峰值后,将持续出现一系列载荷峰值,将这个反复出现载荷峰值的动力学过程称为喘振),诱发着陆器很大的角速度和角加速度,导致惯性导航姿态确定性能下降,甚至可能超过陀螺量程导致导航姿态基准丢失。其中姿态误差超差可能会带来着陆时的侧翻风险,姿态基准丢失则会带来事件触发错误任务失败的严重后果。此外,火星EDL过程大动态过程会给测距测速敏感器的性能、波束可用性带来一定影响;火星环境先验知识的匮乏性可能会导致测距测速敏感器实际性能与设计性能不一致;大底、背罩等多运动体的不规则特性也会给测距测速敏感器带来影响。文献[4,18]研究了基于测距测速修正的月球软着陆自主导航方法,文献[19-21]研究了基于图像匹配的火星软着陆自主导航。但是上述文献均未考虑火星EDL过程的大动态、强不确定性带来的挑战。针对上述挑战和需求,天问一号探测器实现了EDL过程的高容错强自主着陆导航,具备能够应付大不确定性的鲁棒能力,具备对多故障的高容错能力,具备能够应付姿态基准丢失的强自主能力,实现了准确可靠的状态估计。本文则对天问一号探测器火星EDL过程自主导航方案及算法设计进行研究。
1 导航系统方案与组成
1.1 导航坐标系


该坐标系的原点在火心处,指向J2000地球平赤道面法线,轴与地心指向J2000历元地球平春分点方向的向量平行,与,构成右手直角坐标系。

该坐标系的原点在火心处,指向火星北极轴,指向J2000火星平赤道面与火星本初子午线交点,与,构成右手直角坐标系。

该坐标系的原点为着陆器的质心,指向当地椭球的法线方向,在当地椭球切平面内指东,与,构成右手直角坐标系。

该坐标系的原点为着陆平台下表面的几何中心,在着陆器接触火星表面时垂直于着陆平台下表面指向上方,位于着陆平台下表面内,指向火星车驶离方向,与,构成右手直角坐标系。该坐标系用来描述着陆器的姿态和导航敏感器的安装。
1.2 导航敏感器
火星EDL过程的导航敏感器主要包括:惯性测量单元、测距测速敏感器和避障敏感器。其中避障敏感器由光学导航敏感器和多功能避障敏感器组成,用于安全着陆区和安全着陆点选取,并未参与闭环导航解算,因此这里不做详细的说明。本节仅对前两种导航敏感器进行说明。
2)测距测速敏感器:测距测速敏感器在抛大底以后开始工作,用于测量相对火星表面的距离和速度,确保着陆精度和安全。火星着陆器配备了两套测距测速敏感器:一套微波雷达和一套相控阵雷达。这两套敏感器可以同时提供距离和速度测量信息,其中微波雷达有4个波束组成,4个波束均工作;相控阵雷达由9个波束组成,在火星EDL过程中只有4个波束工作。星上会根据当前导航周期内的导航状态,选择下一个导航周期的工作波束,并发出工作波束指令。
1.3 导航算法结构
天问一号探测器在火星EDL过程采取的是惯性导航/惯性导航+测距测速修正的导航方案,其中在抛大底以前由于测距测速敏感器无法工作,因此这一阶段采用的是纯惯性导航;抛大底以后测距测速敏感器开始工作,用于对惯性导航状态提供修正。
由于全状态的不完全可观性,传统的测距测速修正算法仅对惯性导航的高度和速度进行修正,不对惯性姿态进行修正。火星EDL过程制导与控制所关注的导航信息主要为相对火星表面的高度、相对火星表面的垂向速度和水平速度、垂向姿态、水平姿态等。这些导航信息都无一例外的和着陆器的姿态信息有关。相比于月球软着陆过程,火星EDL过程的伞降段动态大、过载高,严重制约了惯性导航的定姿精度,甚至可能带来陀螺饱和导致导航姿态基准丢失的现象。如果惯性导航姿态误差较大,则会带来较大的导航计算误差,可能带来着陆时的水平速度超差而诱发侧翻事故;如果发生陀螺饱和现象,则会发生姿态基准丢失现象,从而导致惯性导航和敏感器计算出的高度和速度信息均有误,后果极其严重,可能会错误进行事件触发或实施错误控制,导致着陆任务失败。针对上述风险,天问一号着陆器在嫦娥三号着陆器导航框架的基础上,设计了基于惯性测量单元和测距测速雷达的导航基准重构算法、引力方向修正算法。天问一号探测器EDL过程的导航算法结果如图1所示,整个算法结构由前台和后台两部分组成,其中前台为正常的惯性导航和惯性导航+测距测速修正算法,后台导航利用惯性测量单元和雷达重新确定引力方向。如果多个陀螺出现饱和导致姿态基准丢失,则利用确定的引力方向重新建立导航基准,对惯性导航进行重新初始化,确保导航给出的高度、垂向速度和水平速度大小无误;如果未出现导航基准丢失的情况,则用后台确定的引力方向和惯性导航给出的引力方向进行监测和比对,在必要时进行引力方向修正,提高垂向姿态估计精度,进而提高导航其它状态的估计精度。这种分布式平行式导航结构受启发于嫦娥四号的导航框架,其优势在于前、后台导航计算相互独立、解耦,互不干扰。应当指出的是嫦娥四号探测器的前后台导航框架主要用于测距测速故障检测,提高引入修正数据的可靠性,而天问一号着陆器的前后台导航框架的主要作用在于对姿态进行修正。

图1 天问一号探测器EDL自主导航架构
2 惯性导航
在两器(着陆器和环绕器)分离前的几分钟,上注地面测控给出的着陆器位置和速度,着陆器初始姿态由星敏感器确定。自那一刻起,着陆器姿态由陀螺和星敏感器联合确定,位置和速度由高阶轨道动力学外推得到,其中加速度计用于对非引力加速度进行补偿。在大气进入前一分钟左右,由于火星的遮挡作用导致星敏感器不再可用,这时候开始进行惯性导航外推。
火星EDL过程动态较大,圆锥效应和划桨效应明显,为了尽可能的对圆锥效应和划桨效应进行补偿,天问一号探测器采用的是基于四子样的大动态惯性导航算法。上文说过,天问一号探测器配备了6个陀螺和加6个加速度计,在进行导航外推前先对陀螺和加速度计进行基于平衡方程的故障检测算法,挑出3个陀螺和3个加速度计用于外推。IMU的故障检测和选取算法继承自嫦娥系列着陆器。
3 导航参数解算
从进入到火星大气到抛大底这段时间,惯性导航主要用于制导与控制以及开伞、抛大底等关键事件的触发。涉及到的参数计算有马赫数、升阻比和阻力加速度估计。忽略风速的影响,马赫数的计算公式如下:
(1)
式中:∈为火星的自转角速度,为常矢量;对于=[,,]∈,()由下式给出:
式中的和分别为惯性导航系统给出的位置和惯性速度;为当地音速,计算公式如下:

(2)
其中,为火星大气绝热指数,为通用气体常数,为火星大气绝对温度,具体数值根据表格插值得到,为火星大气平均分子摩尔质量。
升阻比和阻力加速度估计用于气动减速过程的制导,阻力加速度大小的计算公式如下:
(3)


(4)
从而可以由式(3)和式(4)计算得到升阻比。
4 测距测速修正
在伞降段抛掉大底以后,测距测速敏感器开始工作,可以提供相对火星表面的波束方向视向距离和速度测量。其中速度测量可以对惯性导航的三维速度进行修正,距离测量对横向位置不敏感,因此仅进行高度方向的修正。
4.1 测距修正
测距修正的动力学方程由下式给出:
(5)

测距敏感器有多个波束,第个波束的观测模型可以写作

(6)


(7)


(8)


(9)
对于式(5)和(9)组成的动力系统,其测量更新方程可以由下式给出
(10)
其中,()和()ver分别为第个测距波束对应的高度和垂向速度修正量,为修正前导航计算的高度,()∈为滤波增益矩阵。由式(5)和(9)组成的系统为定常系统,()采用的是稳态卡尔曼滤波的增益矩阵,并根据高度、测量噪声以及地形起伏拟合得到。
考虑到测距敏感器能够提供多个波束的测距信息,因此修正时需要进行融合修正。如果两个或两个以上的测距波束有效且满足引入修正条件,则采用融合加权修正的方法。融合后的高度修正公式如下:

(11)

给定,惯性位置的更新方程如下:

(12)
其中,上标-、+分别表示修正前和修正后的惯性位置,为了书写方便,上式中忽略了上标。
4.2 测速修正


(13)


(14)
将式(14)代入到式(13)中可以得到


(15)


(16)
而测速敏感器第个波束的观测方程为

(17)

由式(16)和式(17)可以得到第个波束的速度修正公式如下

(18)

式(18)给出了单个波束的速度修正公式,在实际飞行的时候有多个波束可用,因此需要对多个波束的修正进行融合实现导航速度的三维修正。对于多个波束可用的情形,如果可用波束均共线,则只能沿着这些波束的共线方向修正,如果所有可用波束均共面,则只能在共面内进行修正,否则可能会带来滤波发散问题。对于火星着陆器,由波束的安装可知不存在波束共线的情形。但是由于相控阵敏感器的工作波束不固定性,可能存在波束共面的情形。针对这一情形,建立等效波束的概念。不管可用的实际波束是几个,如果有3个不共面的有效波束,则其等效波束(记为)个数为3;如果所有有效波束均共面,则等效波束个数为2;如果只有1个有效波束可用,则其等效波束个数为1;否则,等效波束为0。具体的判据如下:当可用的有效波束个数≥3的时候,记这些波束指向组成的矩阵为

(19)

具体的修正策略如下:如果=0,则不进行修正;如果=1,则只沿着有效波束方向进行修正;如果=2,则只在波束构成的平面进行修正;如果=3,则进行三维速度的修正。
4.3 测距测速引入修正判断
在上述两节中提及到(),()用于表征是否引入修正的标识符。天问一号探测器采取了多种逻辑对引入修正进行了判断,其中:第一道逻辑是测距测速敏感器给出的标识符为有效;第二道逻辑是利用故障检测算法对测距观测量、测速观测量进行故障检测和选取,其中天问一号探测器提出了基于中位数的测距多波束故障检测与选取、基于决策推理和平衡方程的自适应构型多波束测速故障检测与选取算法(限于篇幅限制,将在另外的文章中给出详细算法),可以实现多个波束的故障检测、隔离和剔除;第三道逻辑是将测距、测速观测量与导航值进行对比,只有在两者的误差量小于一定阈值的时候才引入修正,这样可以实现对测距、测速野值的有效剔除。嫦娥三号着陆器采取的是固定系数的修正判断,火星EDL过程中,飞行过程动态大,一方面可能会导致修正前的惯性导航误差较大,另外一方面可能会导致修正前期可用波束少的情况。为了尽可能的进行修正,引入修正判断阈值不易过小。但是过大又可能会导致修正判断条件不起作用,有引入野值波束的风险,从而带来惯性导航拉偏的情况。一旦惯性导航被野值拉偏,则后续正常波束可能难以被引入,风险极大。针对这一风险,天问一号探测器提出了基于波束修正个数监测的自适应比对阈值方法,提高了系统鲁棒性。对于测距敏感器而言,在以下条件满足的时候()=1:
|Δ-Δ|≤Δ+||
(20)
式中:Δ,Δ分别表示测距敏感器和系统导航值在同一时间区间内的高度差,Δ和均为常数,为测距比对自适应放大系数,默认值为1.0。如果连续若干个周期引入测距修正的波束过少,则放大至2倍,直至引入测距修正的波束个数恢复正常时才将置为默认值。如果式(20)不满足,则()=0。
对于测速敏感器而言,如果

(21)
则()=1,否则()=0。式(21)中为设置的门限,为测速自适应放大系数,默认值为1.0,如果连续若干个周期引入测速修正的波束过少,则放大至2倍,直至引入测速修正的波束个数恢复正常时才将置为默认值。
5 基于IMU和测距测速敏感器的导航基准重构或引力方向修正

(22)
将第个测速波束的观测方程(17)重写作

(23)



(24)


(25)


(26)

(27)
因此可以构造四元数Δ,如下

(28)
则姿态修正方程如下

(29)

6 飞行结果
天问一号探测器于2021年5月15日4时18分进行两器分离,历经约3小时飞行后,到达火星EDL过程的大气进入点,经过约9分钟的气动减速、伞降减速、动力减速和着陆缓冲,于7时18分成功软着陆于火星乌托邦平原南部的目标着陆区。其中星上导航的起始时刻为降轨前11分钟,其位置和速度由地面注入,姿态由星敏确定得到。自此至大气进入前的着陆器的姿态由陀螺和星敏联合确定得到,位置和速度由高阶轨道动力学外推得到。在大气进入点的导航位置和速度见表1。

表1 火心J2000坐标系下的大气进入点轨道参数
图2和图3给出了火星EDL过程的状态曲线,其中0时刻表示大气进入时刻,气动减速段、伞降减速段和动力减速段用+号隔开,分别历时281.335 s,169.472 s和89.60 s。在自大气进入到抛大底13 s后引入测距测速修正,在导航高度为10 m的时候停止测距测速修正。在停止修正的时刻,导航与测距之间的对比误差优于0.07 m,与测速之间的对比误差优于0.084 m/s,最终的着陆状态为水平速度小于0.16 m/s,垂向速度大小为1.68 m/s,垂向姿态误差小于0.1°。

图2 高度曲线
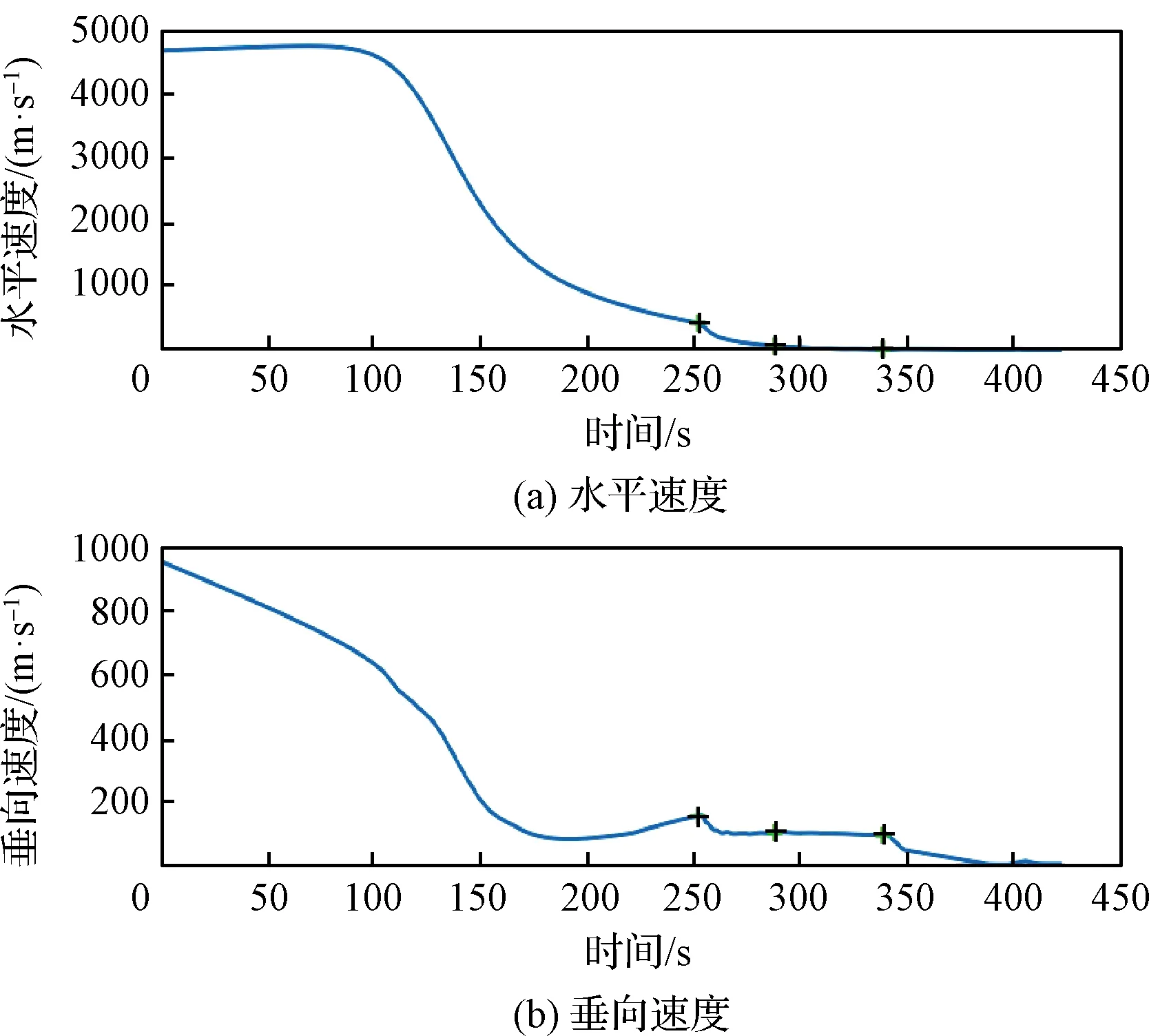
图3 水平速度和垂向速度
从飞行结果看,天问一号自主导航系统圆满完成了预定任务。在着陆时刻,导航相对于测定轨数据之间的绝对位置为1.4055 km。
7 结 论
本文研究了中国首颗火星探测器天问一号的火星进入、下降和着陆(EDL)过程的自主导航技术。天问一号的EDL过程自主导航充分继承了中国嫦娥三号着陆器基于惯性测量单元的测距测速修正导航方案和中国嫦娥五号返回器的纯惯性导航,其中基本导航框架继承自嫦娥三号着陆器。在EDL前期,由于大底的遮挡作用,仅采用惯性测量单元进行惯性导航,在后期采用惯性测量单元+测距测速修正。和地球返回过程相比,火星EDL过程需要在开伞以后仍然实施主动控制,保障着陆状态;而火星大动态及不确知性强的气动减速和伞降过程是月球软着陆所没有的。为了应付火星复杂EDL过程,天问一号探测器配备了高度冗余的测距测速敏感器。为了提高导航系统的可靠性,天问一号探测器设计了适应星上计算能力的多波束测距测速故障检测、隔离与选取算法、基于波束修正个数监测的比对阈值自适应算法;为了提高导航系统对大动态的适应能力,天问一号探测器设计基于惯性测量单元和测距测速敏感器的导航基准重构算法、引力方向修正算法。这些算法与方案保障了天问一号探测任务的着陆圆满成功。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
移动通信(2020年9期)2020-11-06
现代电子技术(2020年3期)2020-08-04
伙伴(2019年12期)2019-01-17
环球时报(2019-01-12)2019-01-12
武昌理工学院学报(2016年4期)2017-01-17
企业技术开发·下旬刊(2016年8期)2016-10-13
中学科技(2015年7期)2015-07-03
党建文汇·上(2014年1期)2014-07-03
现代电子技术(2009年8期)2009-06-25
