基于神经网络的多模型机动目标跟踪方法研究
2022-05-18 02:12张晓杰赵灵峰
无人系统技术 2022年2期
张晓杰,汪 灏,赵灵峰
(上海微小卫星工程中心,上海 201210)
1 引 言
目标跟踪是利用探测器雷达、声纳、红外等所获得的运动目标飞机、坦克、舰艇等量测,对目标的运动状态位置、速度、加速度等进行估计和跟踪的方法[1-3]。由于量测数据中含有大量的干扰成分,有必要对量测信息进行处理。因此,目标跟踪过程也是一个消除误差的处理过程。在军事和民用领域中,可靠而精确地跟踪目标是目标跟踪系统设计的主要目的[4-5]。
机动目标跟踪滤波算法是机动目标跟踪系统的核心内容。近年来,随着科学技术的不断发展,机动目标跟踪领域涌现出诸多更成熟的算法,包括自适应跟踪算法、多模型跟踪算法。其中,自适应滤波算法的理论成果大致可以分为基于最小均方误差的自适应滤波算法、基于递推最小二乘法的自适应滤波算法以及基于卡尔曼滤波算法的自适应滤波算法。之后,为了提高卡尔曼滤波算法的动态性能,又提出了一系列衍生算法。多模型算法是目前混合系统估计所采用的一类主要方法。20世纪60年代中期,提出了最早的多模型算法,之后提出交互多模型算法,该算法采用的模型之间存在相互联系,但模型集固定,无法对目标机动状态进行充分描述。后期又提出一种模型可变的自适应转换的变结构交互式多模型算法,可实时在线调整模型集,提高了动态目标跟踪系统的自适应性能[6-7]。
根据所采用的机动目标运动状态模型数目,机动目标跟踪算法可分为单模型算法和多模型算法[8]。在单模型算法中,同一时刻只使用一个模型,系统通过检测器控制滤波模型在非机动模型和机动模型之间切换。但切换过程中,辨识机动模型会带来延迟并导致很大的跟踪误差,而且也不容易确定目标由机动模型回到非机动模型的正确时间[6-7]。而在多模型算法中,同一时刻由多个模型共同描述机动目标的运动状态[9-11]。各模型基于各自的滤波器并行工作,模型是否符合当前机动模式由其似然函数计算概率确定,整体估计由各滤波器估计的概率组合得到[12]。
2 问题描述
机动目标跟踪基本原理如图1所示。
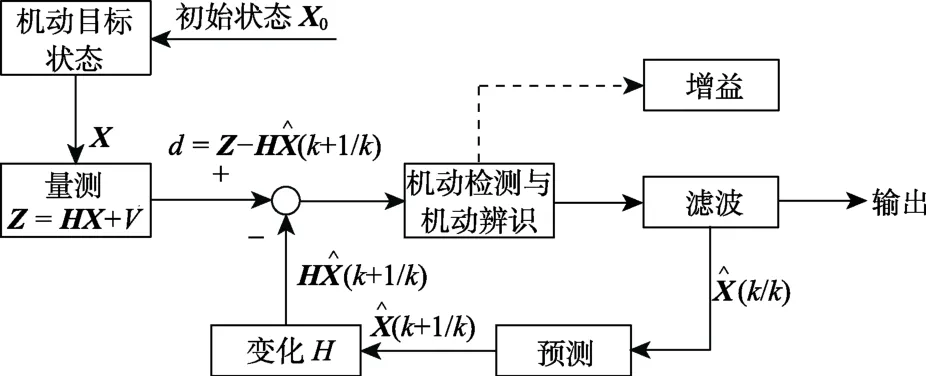
图1 机动目标跟踪基本原理Fig.1 Basic principles of maneuvering target tracking
假设机动目标的运动模式和对目标的观测可用已知的数学模型表示,且假设模型是线性的,则离散时间下其状态方程和量测方程可表示为:

其中,向量X(k)和Z(k)分别表示k时刻机动目标运动状态及量测量;F(k)和H(k)是k时刻系统的过程矩阵和量测矩阵;ω(k) 和υ(k) 是k时刻系统的过程噪声和量测噪声;d为残差。由于在机动目标运动过程中目标运动模式具有不确定性,也就是公式中的矩阵F(k)形式和参数,以及过程噪声ω(k) 不能确定。单机动目标跟踪过程本质上是自适应滤波过程。首先根据残差d的变化进行机动辨识或者机动检测,其次按照某一逻辑或准则调整滤波增益、协方差矩阵以及未知参数,并且实时辨识出目标机动特性,最后由滤波算法得到目标的状态估计值和预测值,从而完成机动目标跟踪功能[13-17]。
2.1 径向基函数神经网络
RBF 网络是具有单隐层的三层前向网络。第一层为输入层,由信号源节点组成;第二层为隐含层,节点数视所描述问题的需要而定(理论上可以设置多个隐层,但一般只设计一个隐层);第三层为输出层,是对输入模式做出的响应。输入层仅仅起到传输信号作用,对输入信息不做任何变换,输入层和隐含层之间可以看作连接权值为1 的连接,隐含层神经元核函数是高斯函数,对输入信息进行空间映射的变换,计算输入矢量和样本矢量欧式距离的RBF 值,输出层神经元的作用函数为线性函数,对隐含层神经元输出的信息进行线性加权后输出,作为整个神经网络的输出结果。输出层与隐含层所完成的任务是不同的,因而他们的学习策略也不同。输出层是对线性权进行调整,采用的是线性优化策略,因而学习速度较快;而隐含层是对激活函数(高斯函数)的参数进行调整,采用的是非线性优化策略,因而学习速度较慢。
RBF 网络不像BP 神经网络通过后向传播改变权重,RBF 神经网络隐含层和输入层的连接权重是有固定算式(欧式距离)的。某个测试集样本p和某个训练集样本越接近,即欧氏距离越小,那么在RBF 作用后输出的值就越大。即RBF 使样本点只被附近(圈内)的输入激活(权重大),如图2所示。
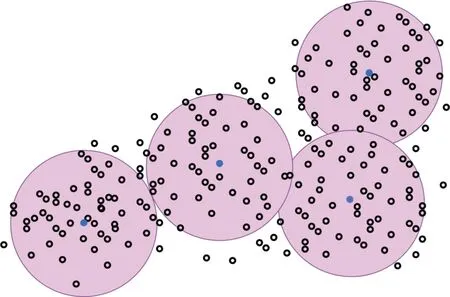
图2 RBF 局部响应Fig.2 Partial response of RBF
2.2 机动目标运动模型
在目标跟踪机动目标建模中,通常假设控制输入是一个未知的加速度,并且设其为一个随机过程。根据所假设的随机过程的不同,可将机动目标模型分为白噪声模型、马尔可夫过程模型和半马尔可夫模型跳变过程模型3 类。其中,白噪声模型假设控制输入是一个白噪声过程,包括匀速CV 模型、匀加速CA 模型和多项式模型等;马尔可夫过程模型假设控制输入是一个马尔可夫过程,包括Singer 模型、协同转弯模型以及二阶马尔可夫加速度模型等;半马尔可夫模型跳变过程模型假设控制输入是一个半马尔可夫跳变过程。总的来说,这些模型各有特点,在精度、快速性或在实时性等方面各有所长。
匀速CV 模型可表示为:

在交互式多模型算法中其过程转移矩阵和噪声传输矩阵分别为:
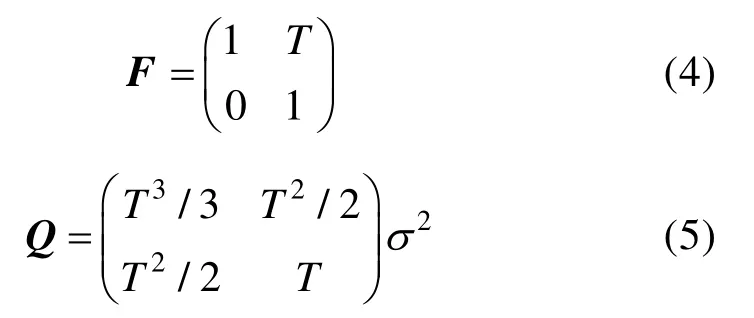
匀加速CA 模型可以表示为:
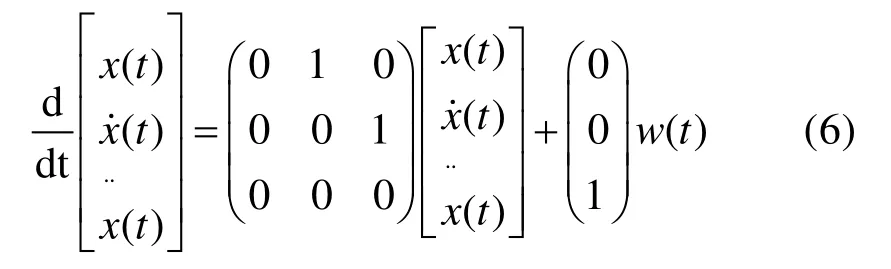
在交互式多模型算法中其过程转移矩阵和噪声传输矩阵分别为:
3 基于神经网络的切换多模型算法
RBF 网络具有单隐含层的三层前向网络,是一种良好的前向网络,能够以任意精度逼近任意连续函数。相比于BP 网络的初始权值参数是随机产生的,RBF 网络的有关参数是根据训练集中的样本模式按照一定的规则来确定或初始化的,因此训练过程中不易陷入局部极小点的解域中,虽然相同功能下RBF 神经网络的神经元个数会较多,但是其训练时间会大大降低,更加符合我们的使用要求[18]。
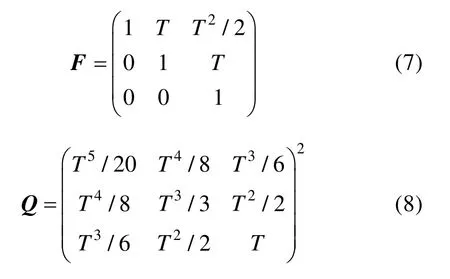
基于神经网络的切换多模型算法原理[19]如图3所示,
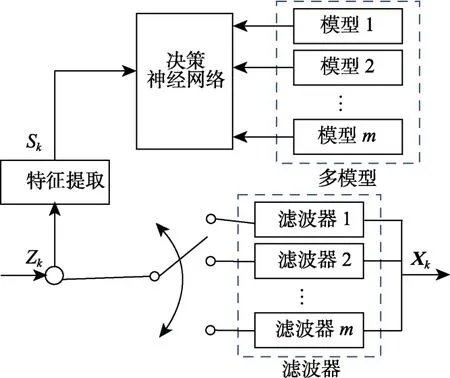
图3 基于神经网络的切换多模型算法原理Fig.3 Principle of switched multi-model algorithm based on Neural Network
图中,Zk是测量值,Sk是机动目标特征向量,输入到已训练好网络参数的不同类别神经网络中,与隐含层中由训练样本组成的输入矩阵比较并输出,mj是决策神经网络的输出向量,决定采用多模型中的第mj个滤波器。
对于一维机动目标,目标状态X=[x v a]T,模型集为选择CV 和CA 模型,观测矩阵假设为三类:只观测位置,观测位置和速度,以及全观测。根据目标状态特性、观测矩阵限制以及模型集分类特征有效性,选择速度的差分,加速度和加速度的差分作为特征量。S= [△v a△a]T为机动目标特征向量,作为RBF 网络的训练样本和实际输入向量。决策神经网络输出为m1=[01]T时,表示选择CV模型,而输出为m2=[10]T时则选择CA 模型。
基于神经网络的切换多模型算法如图4所示。
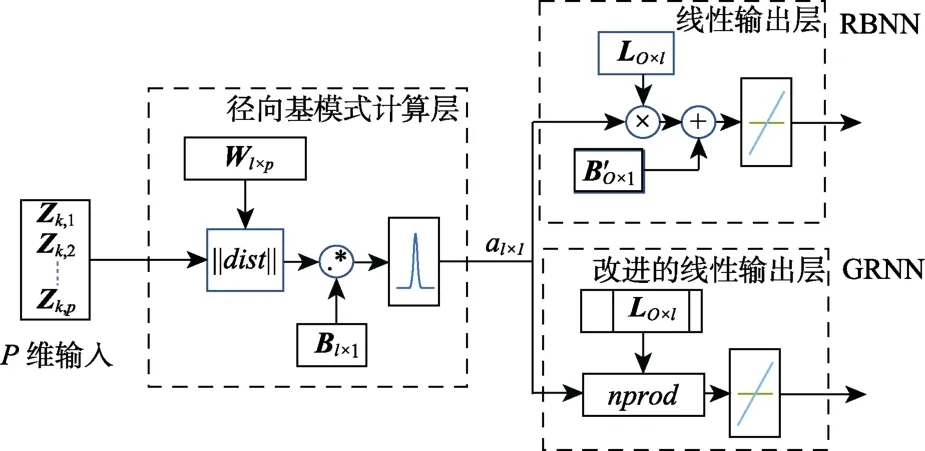
图4 基于神经网络的切换多模型算法Fig.4 Algorithm of switched multi-model based on Neural Network
输入特征为k时刻被观测目标的特征量,本文中,最高为三维(全观测)。图4中,dist表示输入p维向量到给定各径向基的欧几里得距离;nprod表示对输入向量归一化后,再与权系数阵点乘;C表示竞争传递函数(Competitive Transfer Function),即输入向量中最大值的位置为1,其它位置均为0。
显然,对于经过径向基运算层后的一维向量,使用不同的输出层函数后,可得到两种不同类型的神经网络。
4 基于神经网络的多模型切换仿真
考虑某一维机动目标,其初始状态为(60, 4,0)T,运动模式为,在0~50 s 匀速运动,50~100 s匀加速运动,加速度为a=7 m/s2,100~150 s 匀减速,a=-2 m/s2,150~200 s 匀速运动。测量噪声协方差依然设为r=diag ([102 12 12])。仿真步长固定为0.1 s。
4.1 测量矩阵
针对不同实际情况,需要研究全状态和部分状态观测条件下生成网络后的分类效果。因为特征向量的设计对信息的最低要求是速度的差分,因此只观测位置的情况不在此讨论,只考虑观测位置和速度以及全观测两种情况。
4.2 样本数
理论上,RBF 网络对样本数即隐含层神经元的依赖度很低,但由于采用测量值训练网络参数和作为输入向量,而测量值由于测量噪声的存在质量参差不齐,因此提高训练样本的个数将产生积极作用。但是由于每个训练样本都将作为神经元参与计算,这样一来也会带来更大的计算负担。在仿真中采用100 组训练样本生成RBF 网络参数。
4.3 特征组合
机动目标特征向量选用S= [△v a△a]T是本设计的最大维数特征向量,此外的五种特征组合分别为[△v],[△v a]T,[a],[a△a]T,[△a],由于所包含的目标运动信息有一定差异,对最终的估计结果也有不可忽略的影响。
以6 组特征的测试集100 次仿真生成网络的平均用时和平均识别正确率以及最后一次容量为100 的测试集的预测对比看,广义回归神经网络( Generalized Regression Neural Networks ,GRNN)和概率神经网络分类效果及生成时间相当接近,RBF 由于零误差通过训练样本,在某些情况下存在超训练目标集的输出结果,导致识别水平相对较差,耗时也并无优势,网络效果较差。而6 组特征中,[△v a]T,[△v a△a]T,[a△a]T,分类效果最佳且耗时相当,[a] 略逊,其余两组较差,可见以加速度为识别判断的核心特征,结合其他特征就可以更稳健地估计目标机动。
从数据来源分析,真值训练网络效果稳定,但由于样本有限,面对更大噪声的测量输入时将无能为力,而测量值训练网络虽然训练样本质量一般,但可通过一定范围内增加样本数实现更具鲁棒性、更高水平的分类效果。
从测量矩阵来看,系统观测属性对RBF 网络至关重要,当缺少了加速度的观测信息,网络的识别水平将受到很大的影响,近乎降到50%“没有识别水平”的程度。因此,如何保证RBF 网络可以获得加速度的信息是进一步利用RBF 网络的前提。
最后,对比不同样本数的仿真结果发现,通常,样本增加,精度提高,耗时增加。
5 蒙特卡洛仿真
本节给出机动目标特征向量选用S=[△v a△a]T,不同方法100 次仿真的一般结果(图中选取10 次),并统计方差情况,其中基于径向基神经网络仿真结果如图5~10 所示,基于广义回归神经网络仿真结果如图11~16 所示。从图中可以看出,使用RBNN 与GRNN 在部分观测条件下,可以有效降低位置观测误差方差,而速度与加速度估计效果则相对差;如果使用全观测,则通过RBNN 与GRNN 估计,可以有效降低位置、速度与加速度的误差方差。此外,与广义回归神经网络相比,径向基神经网络在观测误差方差性能上略差;但在目标大机动时基于径向基网络的切换多模型方法的鲁棒性更佳,提高约11%。
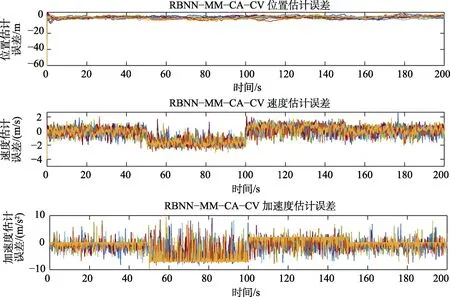
图5 RBNN-MM-CA-CV 估计误差(10 组)Fig.5 Estimation error of RBNN-MM-CA-CV under partial observation
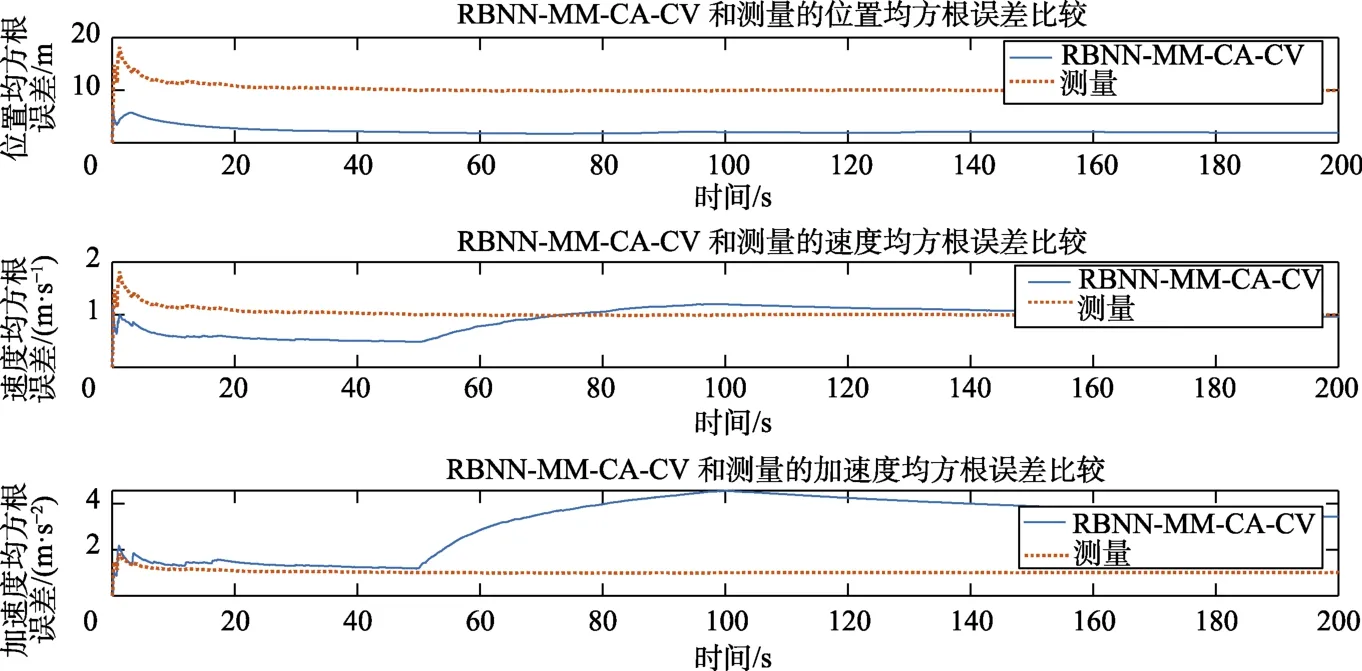
图6 部分观测下RBNN-MM-CA-CV 和测量的均方根误差比较Fig.6 Comparison of root mean square errors of RBNN-MM-CA-CV and measurements under partial observation
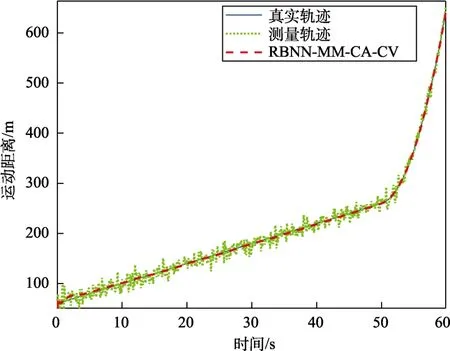
图7 部分观测下RBNN-MM-CA-CV 实际、测量和估计位置Fig.7 Actual, measured and estimated position of RBNN-MM-CA-CV under partial observation
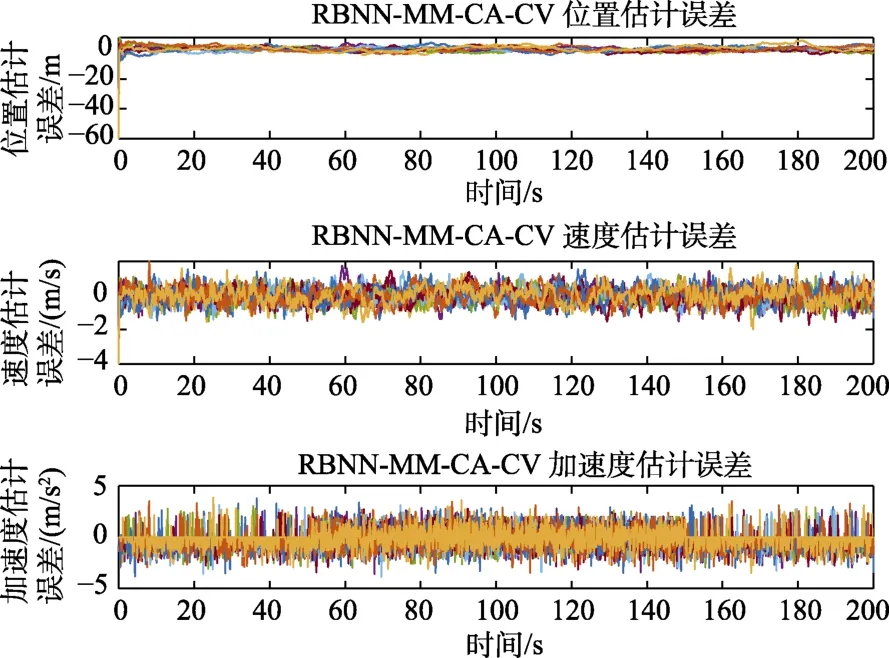
图8 RBNN-MM-CA-CV 估计误差(10 组)Fig.8 Estimation error of RBNN-MM-CA-CV under full observation (10 groups)
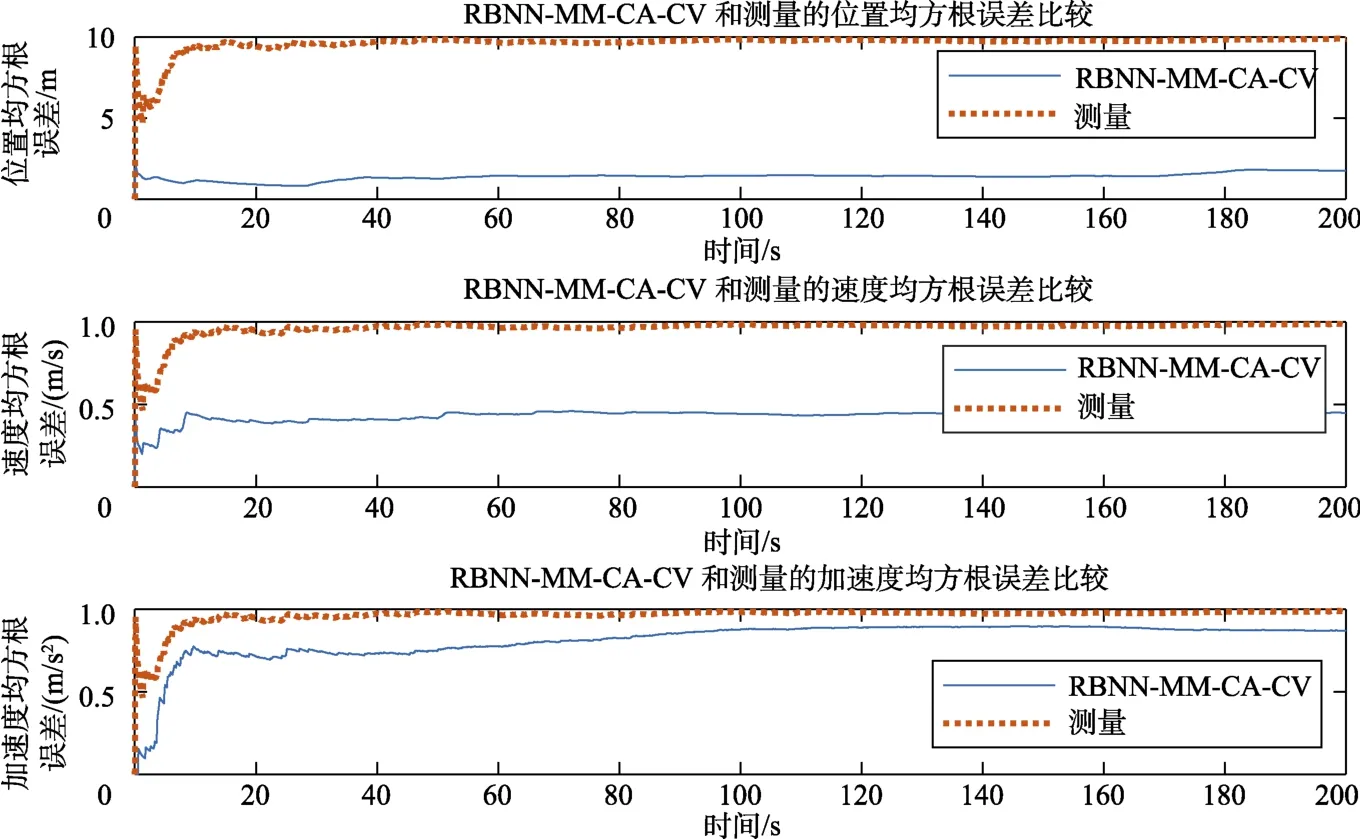
图9 全观测下RBNN-MM-CA-CV 和测量的均方根误差比较Fig.9 Comparison of root mean square errors of RBNN-MM-CA-CV and measurements under full observation
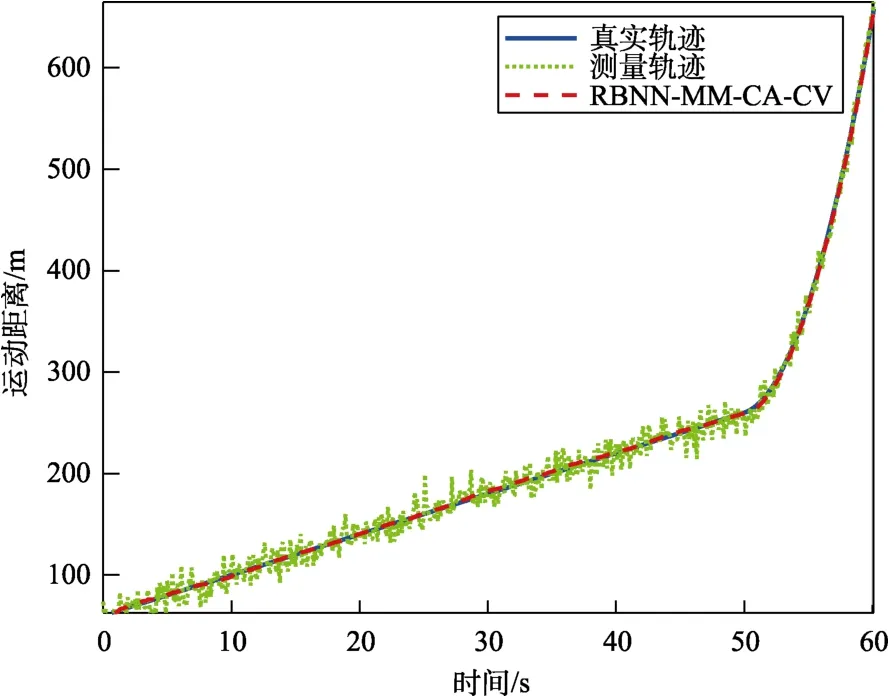
图10 全观测下RBNN-MM-CA-CV 实际、测量和估计位置Fig.10 Actual, measured and estimated position of RBNN-MM-CA-CV under full observation
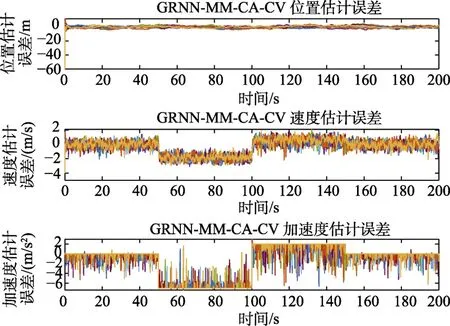
图11 GRNN-MM-CA-CV 估计误差(10 组)Fig.11 Estimation error of GRNN-MM-CA-CV under partial observation (10groups)
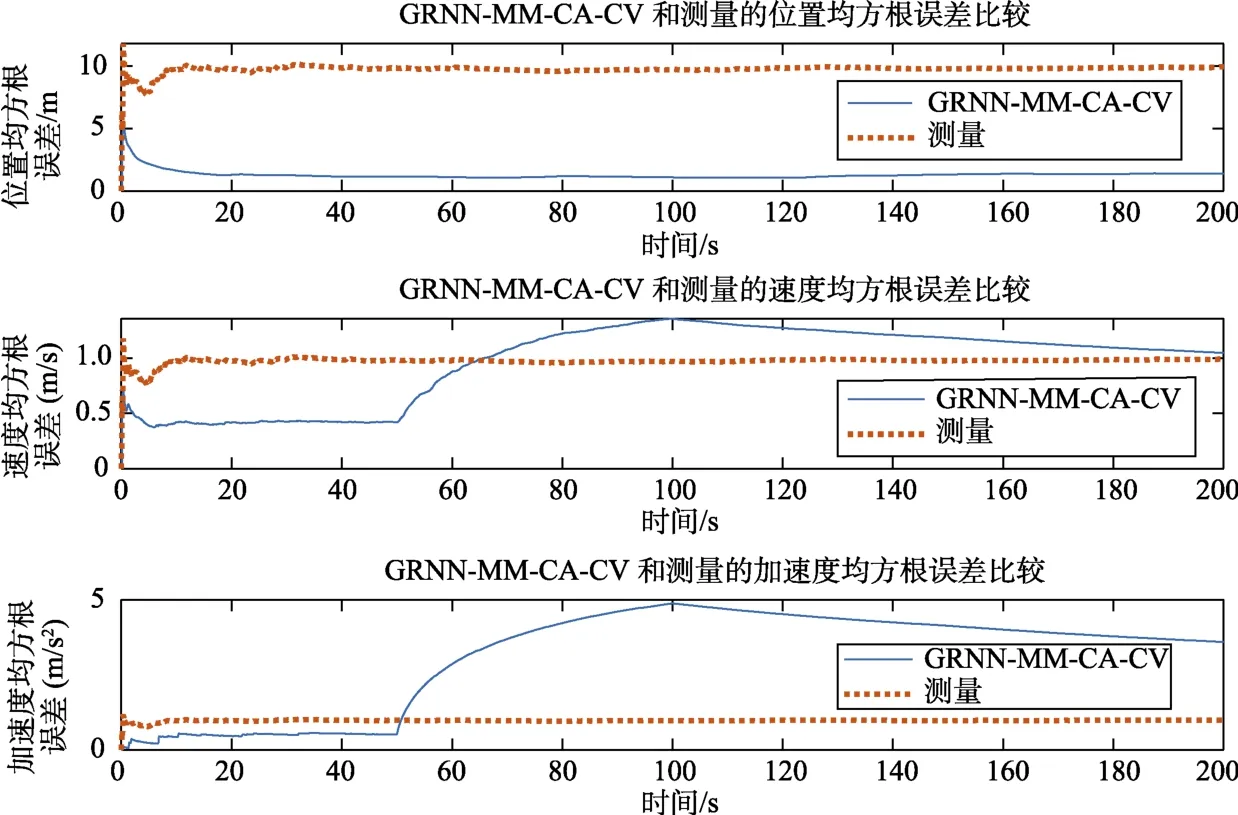
图12 部分观测下GRNN-MM-CA-CV 和测量的均方根误差比较Fig.12 Comparison of root mean square errors of GRNN-MM-CA-CV and measurements under partial observation
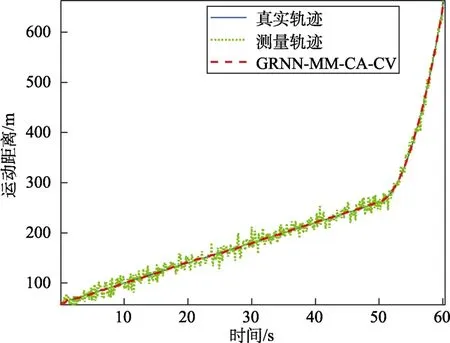
图13 部分观测下GRNN-MM-CA-CV 实际、测量和估计位置Fig.13 Actual, measured and estimated position of GRNN-MM-CA-CV under partial observation
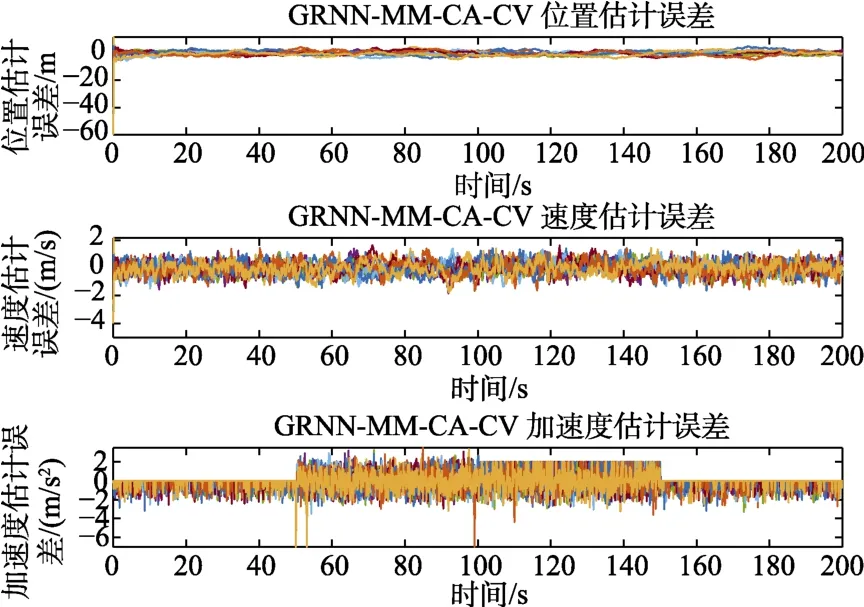
图14 GRNN-MM-CA-CV 估计误差(10 组)Fig.14 Estimation error of GRNN-MM-CA-CV under full observation (10groups)
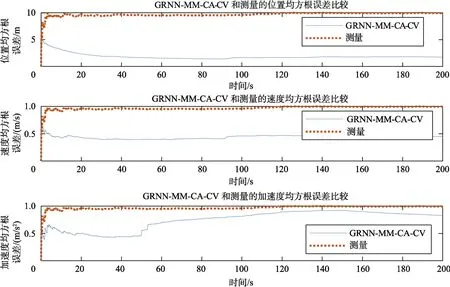
图15 全观测下GRNN-MM-CA-CV 和测量的均方根误差比较Fig.15 Comparison of root mean square errors of GRNN-MM-CA-CV and measurements under full observation
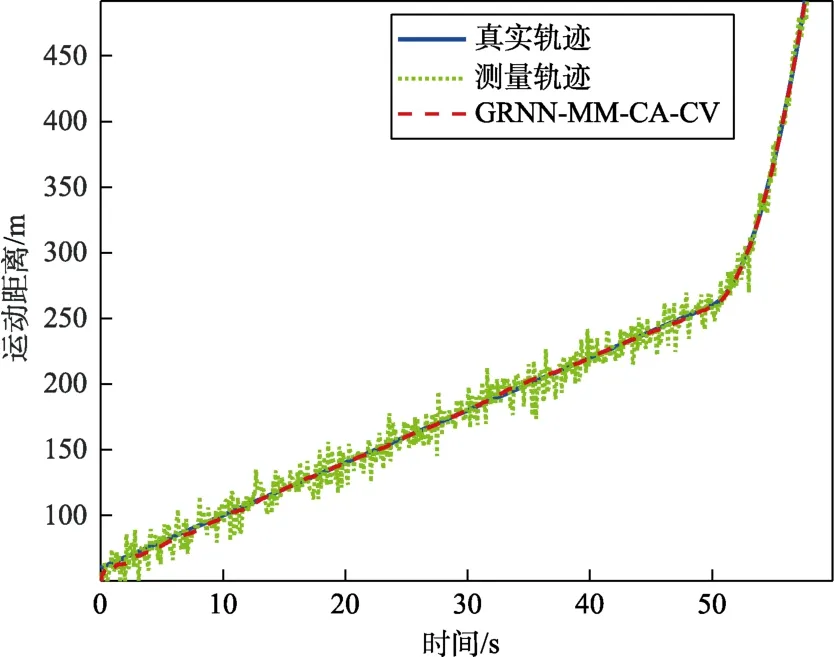
图16 全观测下GRNN-MM-CA-CV 实际、测量和估计位置Fig.16 Actual, measured and estimated position of GRNN-MM-CA-CV under full observation
5.1 径向基神经网络
5.1.1 位置速度观测
5.1.2 位置速度加速度观测
5.2 广义回归神经网络GRNN
5.2.1 位置速度观测
5.2.2 位置速度加速度观测
6 结 论
本文研究了基于神经网络的多模型机动目标跟踪方法,提出了一种利用神经网络匹配有限多模型集中最接近目标运动特性的模型,并据此进行机动目标跟踪滤波的基本框架。利用神经网络在特征泛化表达中优势,克服了一般基于阈值切换方法的设计困难,同时避免了交互式多模型方法在模型交互时带来了估计方差增大的问题。
针对简单的一维机动目标,仿真比较了径向基神经网络与广义回归神经网络,结果显示两种方法都可以有效降低测量位置偏差方差(可达一个量级)。与广义回归神经网络相比,径向基神经网络在观测误差方差性能上略差;但在目标大机动时基于径向基网络的切换多模型方法的鲁棒性更佳,提高约11%。此外,在部分观测条件下,没有加速度的测量信息输入,RBF 网络难以有效判断不同机动属性,误差性能有一定下降。
猜你喜欢
当代水产(2022年6期)2022-06-29
军事运筹与系统工程(2019年3期)2019-08-13
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
汽车观察(2018年12期)2018-12-26
军事文摘(2018年24期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
中国化妆品(2017年12期)2017-06-27
太空探索(2016年7期)2016-07-10