基于链路质量评估的飞行自组网抗干扰多路径路由协议
2022-05-18 02:12段续庭田大新
无人系统技术 2022年2期
张 傲,段续庭,田大新
(北京航空航天大学交通科学与工程学院,北京 102206)
1 引 言
随着通信技术的不断发展,移动自组网逐渐成为通信系统的关键技术并得到广泛应用。飞行自组网(Flying Ad hoc Networks, FANETs)作为移动自组网在空中领域的应用,以飞行器作为网络节点,采用动态组网、无线中继等技术实现节点之间的互联互通,并要求具备自组织、抗干扰与高效组网等能力。所以飞行自组网在设计其路由协议和体系结构上都面临着巨大的挑战,涉及了从物理层到应用层的诸多关键技术[1]。
飞行自组网具有传统无线自组网的共同特征,如无中心、自我调节和多跳等;又有车载自组网独特的网络特性:节点的移动性、行驶环境易受干扰、移动拓扑结构经常变化,网络稀疏,并且难以建立端到端连接等特点[2]。由于飞行自组网的独特特性,使得其路由需求远远超过了移动自组网,所以传统自组网并不能直接应用于飞行自组网中。为了在飞行自组网中实现数据通信,所设计的网络架构或通信机制就必须适应飞行自组网的特殊性质[3]。
飞行自组网可以更加广泛地应用的重要条件就是设计适合于FANETs 的路由协议。网络的性能很大程度上会受路由的影响,所以路由技术成为飞行自组网核心技术之一。为了建立更加可信的网络,在文献[4]中设计基于位置感知的路由方案,用来优化路由的安全与性能设计。在文献[5]中提出基于无人机背景下的车载自组网路由协议,即CRUV 协议。协议中所接收的信息与无人机共享,对交通路段带来益处。胡春等[6]针对无人机的快速移动引起链路中断问题提出了一种按需寻路的可靠路由协议。文献[7]针对复杂环境干扰下飞行自组网中定位问题进行研究,设计高精度抗干扰定位技术来满足节点定位需求。
为了使飞行自组网广泛应用,国内高校实验室目前也有许多飞行自组网方面的研究,开发了基于HLA 分布式操作搭建的FANETs 仿真平台,为开发飞行自组网中的路由协议提供仿真验证平台[8];北京航空航天大学在自主搭建的多无人机平台中实现无人机相互之间的通信协作[9],验证了多无人机通信系统的有效性。飞行自组网的研究促进了无人机及其应用的发展,多无人机集群的飞行自组网具有灵活性,面向实际应用领域的研究目前还在进一步研究与学习阶段,需要大量地进行实验验证与总结。
学者们对路由协议不断进行优化与改进,在存在恶意节点或其他干扰的情况下,所设计的路由仍然能够提供可靠可信的路由。Dietzel 等[10]设计了在多跳路由协议中对冗余信息的传播,以此来检测路由内部的方法。在文中还提出了对于3 种度量图的度量冗余度的方法,及时发现与制止行为不端的恶意节点。研究者们对飞行自组网的路由协议进行深入研究,但随着FANETs 技术的广泛应用,其面临的问题也越来越多,每种路由协议都有其特定的优缺点,适用于特定情况。现有的多数方法都是围绕路径长度、路径的更新情况、路径的通信开销、路径的通信质量进行研究及创新。
本文旨在根据飞行自组网的网络特性设计一种多路径路由算法,用以为无人机间提供有效且可靠的通信数据传输,并在存在恶意干扰时为FANETs 中提供网络弹性保证,使其在存在恶意干扰或信号中断、局部故障的情况下能够保持整体网络性能。研究中将构建基于链路质量、流量负载和空间距离的抗干扰多路径路由模型,以深入研究路由信息的传递路径。通过仿真实验评估所提出的路由协议,并将其性能与典型路由协议进行比较和分析,验证所设计模型的有效性和可靠性。
2 系统模型
在本文中,我们分析一组在FANETs 中的无人机作为自由移动的节点,每个节点都由各自的地理位置进行标注。各节点配备全球定位系统,惯性测量单元和数字地图,来获取其节点的地理位置和相关移动信息[11]。假设无人机在进行数据通信时处于同一水平面,即高度恒定[12]。因此,为简化研究场景,本文考虑在二维(2D)空间,设计迁移模型和空间距离方案。例如,第i个节点ni的二维位置坐标和速度矢量分别由{xi,yi}和{vix,viy}表示,研究结论同样可以扩展到三维(3D)空间。本文假设节点没有能量限制,因为它们配备了可从充电站或环境能源(例如,无线功率传输、太阳能等)充电的可充电电池。另外,假设每个节点具备IEEE802.11p 无线通信能力,传输范围为300 m。
2.1 链路质量
为了对链路质量进行评价,在以往的研究中大多数采用以下4 个指标之一:接收信号强度指示(Received Signal Strength Indicator, RSSI)、数据包传递率(Packet Delivery Rate, PDR)、信号与干扰加噪声比和误码率。与其他3 个指标相比,RSSI可以快速准确地估算出链接是否质量很好[13]。文献[14]证明较高的RSSI 值会导致更好的数据包传输率,并且只要无线电收发器的RSSI 值保持在55 dBm 以上,基本上可以实现所有数据包的传输。另外,由于RSSI 在较短时间内的数值变化微小(标准偏差小于1dBm),以此来判断链路的稳定状态。本文采用RSSI 的统计信息来对链路质量进行评估。
在本文中,利用基于切比雪夫(Chebyshev)不等式的函数[15]来对链路质量进行评估。在概率论中,切比雪夫不等式可以确保在任意的概率分布或数据样本中,则对于任意正数ε,数学期望E(X)和方差var(X)关于离散变量X具有以下不等式:

当方差var(X)趋于零时,随机变量X的值无限接近或与其期望值相等,也就是说随机变量X在这种情况下是相对稳定的。根据数学定义,方差可以表示为:

以及:

式中,n为所计算方差的总体例数。
因此,var(X)可以表示为

无线收发器普遍拥有RSSI 寄存器,其中读取的RSSI 值可以反映出此时的接收信号强度。因此,节点接收到邻居节点传来的数据包的同时,也就读取了RSSI 寄存器中的信息。此处,将RSSI代入式(4)中的变量X。若RSSI 的值接近提出的预期值(如55 dBm),就可以认定发送和接收两端节点间的链路具有稳定性。那么两个节点(如ni和nj)之间的链路质量LQi,j表示为
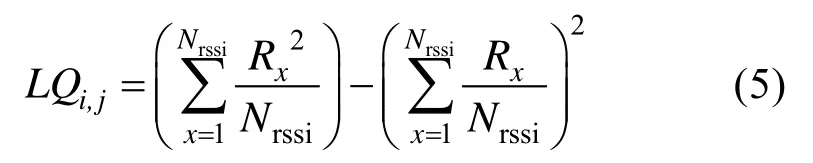
式中,Nrssi为RSSI 样本的总数;Rx为第x个样本的RSSI 值。
例如,节点na,nb和nc是ni的邻居节点。如表1所示,Rx,Rx+1,Rx+2和Rx+3是来自na,nb和nc的最新接收数据包中的RSSI 值。ni可以根据式(5)计算链路质量,其中LQ计算值最小的节点与ni之间构成的链路被视为最稳定链路。

表1 计算节点链路质量Table 1 Calculation results of node link quality
根据表中数据可知,在na,nb和nc节点中,LQi,a计算值最小,认为ni和na之间的路径是最稳定链路。若出现两个节点的LQ值相同的情况,则比较接收到的最后一个数据包的RSSI 值,与预期值(如55 dBm)相差最小的节点作为邻居节点以提供稳定的链路。例如,nb和nc之间进行比较,由于最后的数据包中58 dBm 与55 dBm 更接近,所以认为nc与ni之间的路径为更稳定链路。
2.2 流量负载
具有请求发送(Request To Send, RTS)/清除发送(Clear To Send, CTS)交换的IEEE802.11介质访问控制(Medium Access Control, MAC)协议可以解决隐藏终端或暴露终端可能导致的帧冲突。该协议引入了物理载波与虚拟载波侦听结合的新概念,在这种协议中,利用网络分配向量(Network Allocation Vector, NAV)来实现这种概念。NAV 中有一个时间值,可以用来表示无线介质因其他的节点传输而预计信道繁忙的持续时间值。当节点收到MAC 层带有帧传输时间字段的RTS 或CTS 数据包时,则以此设置自己的NAV,并设置在这段时间段后再进行其他可能的传输。NAV 还用来反映介质的繁忙程度,可以用来衡量节点争用和业务负载情况[16]。例如,具有3 个活跃邻居节点的节点比只有一个活跃邻居节点的节点获得访问共享介质的可能性小。所以,短时间内信道的平均繁忙程度可以反映出节点附近的业务负载情况。为了减轻流量突发的影响,节点ni处无线介质的平均繁忙程度Tibusy表示为
式中,NAVik-1为来自最近的媒体访问的度量;α为系统参数,根据当前流量状况对平均值计算产生的影响进行配置。
根据IEEE802.11 的通信机制,当MAC 层不能及时将分组发送出去时,就会在存储器中对分组进行缓存。那么,在业务负载多的情况下,一些节点的缓存区中就会有更多的数据包在此等待并缓存。因此,节点ni的缓存区中存储的平均等待数据包数Qibuf可以长期指示ni周围的业务负载,可以表示为

式中,Bik-1为缓存区中存储的最新测量的等待数据包数;β为系统参数,根据当前流量状况对平均值计算产生的影响进行配置。
这里,对式(6)、式(7)中的系统参数α、β进行说明,α、β∈[0,1],α、β的值越大表示当前流量状况对平均值的影响就越大。当α、β取极值1 时,当前流量状况主导平均流量负载。在本文实验中,α、β取值为0.1。
由以上得出,节点ni的总流量负载TLi可以表示为

式中,γ为滤波器增益常数,取值范围为[ 0 ,1];ϕ为调整因子;(Tibusy+Qibuf)·ϕ为介质访问和分组队列延迟。Tbusy和Qbuf分别是存储在节点na,nb和nc的缓存区中的无线介质的平均繁忙程度和平均等待数据包数量,如表2所示。在本文中,滤波器增益常数取0.5,调整因子取0.02。根据式(8),为各个节点计算业务负载。TLb是最小的,所以nb点流量负载最轻。其中,na、nb和nc的流量负载分别为11.6282、7.7468 和8.9054。
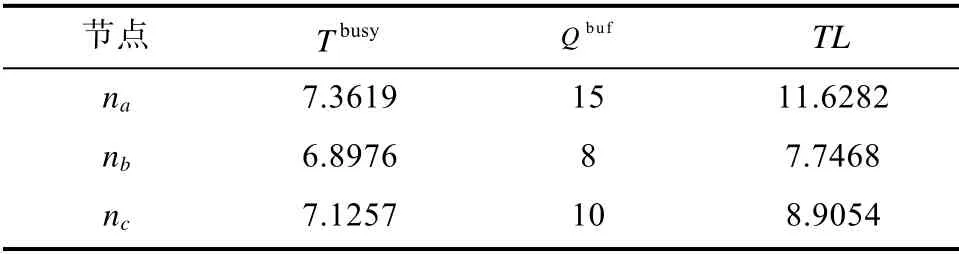
表2 计算节点流量Table 2 Calculation results of node traffic
2.3 空间距离
当FANETs 遭受恶意攻击时,这些恶意攻击会通过有意的干扰和破坏掩盖关键任务区域。在该区域中,在不同的路径上进行工作的无人机会在同一时间被恶意信号所干扰,而进一步导致源节点与目的节点之间的几条路径由于这种情况而断开链接。因此,本节的重点就是如何利用空间节点不相交的多条路径来避免通信传输冲突和路由耦合,而且还要达到减少局部故障和干扰对整体网络通信的影响。
在本节中提出适用于节点不相交的多路径的空间距离计算规则和基于文献[17]的测量路径与路径之间物理距离的计算方法。首先,路径p中节点ni与路径q之间的距离定义为路径p的节点ni到路径q的所有节点的距离中的最小距离,可以表示为

式中,dist(i,j)为节点ni与nj之间的空间距离,可表示为

其中,{xi,yi}为节点ni二维位置坐标;{x j,yj}为节点nj二维位置坐标。
路径p到路径q的距离定义为路径p到路径q上所有节点的距离的算术平均值,可以表示为

式中,size(p)为路径p上的节点数(除源节点和目的节点)。
由于式(11)是针对其中一条路径而言的,所以路径p和q之间的空间距离表示为

例如,源节点nS和目标节点nD之间有三条路径p、q和r,各节点的位置坐标如图1所示。在此,我们考虑水平的二维空间,即X-Y平面上。
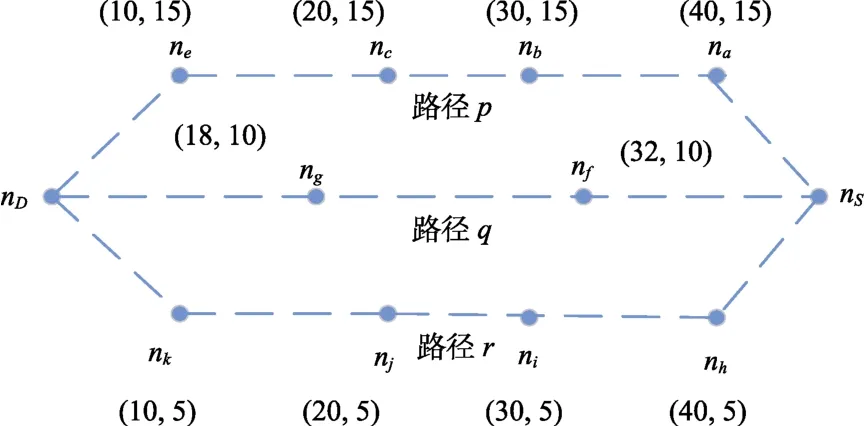
图1 节点位置坐标Fig.1 Position coordinates of the node
如表3所示,可以根据式(12)计算任意两个路径之间的空间距离,路径p,r有最大的空间距离,δ(p,r)= 10。
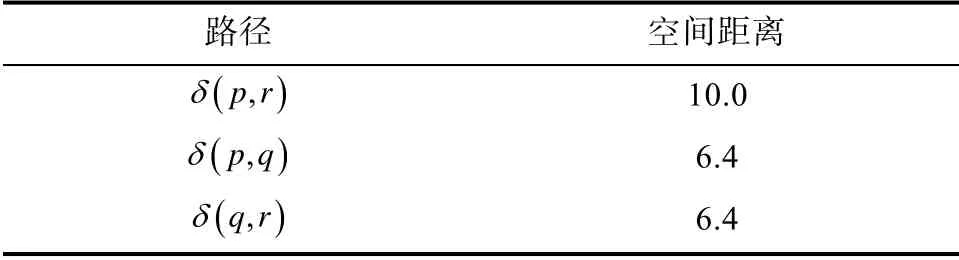
表3 计算节点空间距离Table 3 Calculation results of node space distance
3 路由算法原理
3.1 路由发现过程
在源节点有数据传输需求时,发送数据包前会先在自己的路由表中寻找可以到目标节点的路由。若无法找到这样的路由或路由不可用,那么源节点会广播路由请求包(Route Request,RREQ)进行路由发现过程。
RREQ 包中有源节点ID(Sid),目标节点ID(Did),包序列号(pktseq),源节点的跳数(Chop)、源路由记录(Hroute)、位置坐标列表记录(Pcoord),沿途最差链路质量(Lqt)和最大沿线的业务负载(Tld)。RREQ 包的长度以Byte 为单位,格式如图2所示。

图2 RREQ 消息的格式Fig.2 Format of the RREQ package
3.2 正向路由建立过程
传输路径中的各个中间节点首次收到邻居节点的RREQ 包,首先对包序列号pktseq和到源节点的跳数Chop进行缓存。根据式(5)和式(8)可以计算得到此节点和发送RREQ 包的节点之间的链路质量和此刻的业务负载。由于RREQ 包中Lqt为沿途最差链路质量,如果根据公式计算的链路质量大于Lqt,则对Lqt进行替换。同理,由于RREQ 包中Tld为沿线最大业务负载,若计算得到的流量负载大于Tld,则对Tld进行替换。并将这个节点的ID 添加到Hroute中,将节点的位置坐标添加到Pcoord中,将跳数Chop的值加1,然后进行重新广播。若链路质量与业务负载小于或等于当前值,将仅在源路由记录Hroute中添加节点ID,在位置坐标列表记录Pcoord中添加位置坐标,将跳数值加1,且重新广播RREQ 包。
当节点再次接收到重复的RREQ 数据包时,会把再次接收到的数据包中搭载的Chop与之前缓存的跳数进行对比。如果RREQ 包中的Chop大于之前缓存的跳数,那么此节点将忽略重复的RREQ 数据包。
3.3 反向路由建立过程
在反应式路由协议中,各节点会主动监听正在传输的数据包,而且会在其路由表中缓存路由信息,以此来掌握其他节点的路由信息。在这个过程中,监听有利于提高路由的性能。本文中提出的抗干扰多路径路由,即使中间节点的路由表中已经存在了目的节点的路由信息,中间节点也不可以对此进行路由回复,将路由回复(RREP)数据包直接回复到源节点。这是因为如果中间节点从缓存中回复RREP 数据包,由于目的节点没有达到匹配的RREQ 数据包数量,导致很难建立最大空间节点不相交的多条路径,目的节点将不知道中间节点缓存的路由信息[18]。
目的节点接将收到的多个不相交节点的路由信息存储在路由表中。当目的节点第一次接收到RREQ 数据包时,它会在自己的路由表中记录pktseq,Hroute,Pcoord,Lqt和Tld这些信息。目的节点会在一定的时间段内(twait)持续地接收更多的RREQ 数据包,并掌握所有可能的路由信息。
当目的节点再次接收到与之前相同的RREQ数据包时,就会将重复的RREQ 数据包中的Hroute与路由表中记录的所有节点不相交路径进行对比。如果这个重复的RREQ 数据包中的Hroute记录的节点,除了源节点和目的节点外,与路由表中已有的节点不相交路径之间没有共有的点,它将接收到的RREQ 数据包中的pktseq,Hroute,Pcoord,Lqt和Tld记录到路由表中。否则,目的节点会因为不满足节点不相交路径的要求而丢弃接收到的RREQ 数据包。
大多数路由算法几乎没有考虑长距离通信问题,这带来了较高能耗[19]。所以第一次接收到的RREQ 数据包中所记录的路径(最短延迟路径)有更高的优先权在路由表中进行存储。最短延迟路径的特点是源节点和目标节点之间的跳数更少,沿转发路径具有更好的链路质量和轻量的业务负载。最短延迟路径还具有最大限度地减少传输延迟和路由发现过程等待时间,是在反应式路由协议中根据实际情况急需解决的问题。
在twait时间段过后,目标节点会通过计算的链路质量、业务负载和空间距离来选择不存在公共节点的路径。本文将研究路径数目设置为两条。在路由表中每对路径都匹配相应优先级(Pprio),这代表节点不相交路径在链路质量、业务负载和空间距离的综合判断因子。两个节点不相交路径p和q的优先级可以表示为

式中,为沿着路径p的最差链路质量;为沿着路径p的最大业务负载;为沿着路径q的最差链路质量;为沿着路径q的最大业务负;δ(p,q)为路径p和q之间的空间距离。
此处,ϖ、σ和ς是计算对优先级的每个指标的加权因子,并且(ϖ+σ+ς) = 1。根据计算出的,将选择具有最小Pprio的路径,对作为两条不相交的路径发送数据包。
在此过程之后,目标节点将带有反向路由信息的RREP 数据包回复到源节点。源节点在接收到RREP 包之后,在自己的路由表中记录RREP包中的完整路由信息,然后沿着两条节点不相交路径开始进行数据包的传输。路由建立流程如图3所示。
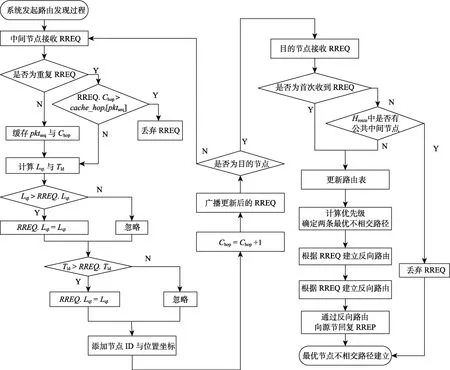
图3 路由建立流程图Fig.3 Flow chart of routing setup
3.4 路由异常修复策略
由于节点的移动性、业务拥塞、数据包冲突,甚至故意的阻塞和中断,路径的某些链路可能经常断开。在飞行自组网抗干扰多路径路由中,如果节点连续未能沿转发路径将数据包传递到下一跳节点,即未听到隐式确认或未收到显式确认[20],则它会认为链路已断开并通过断开的链路路由发送错误(Route Error, RERR)数据包到源节点。接收到RERR 数据包后,源节点将删除其路由表中包含断开链路的整个路径。如果会话的两个节点不相交路径中只有一个无效,则源节点将使用剩余的有效路径来传递数据包。如果两个路径均无效,则源节点再次启动路由发现过程,以找到一对新的节点不相交路径发送数据包,如图4所示。
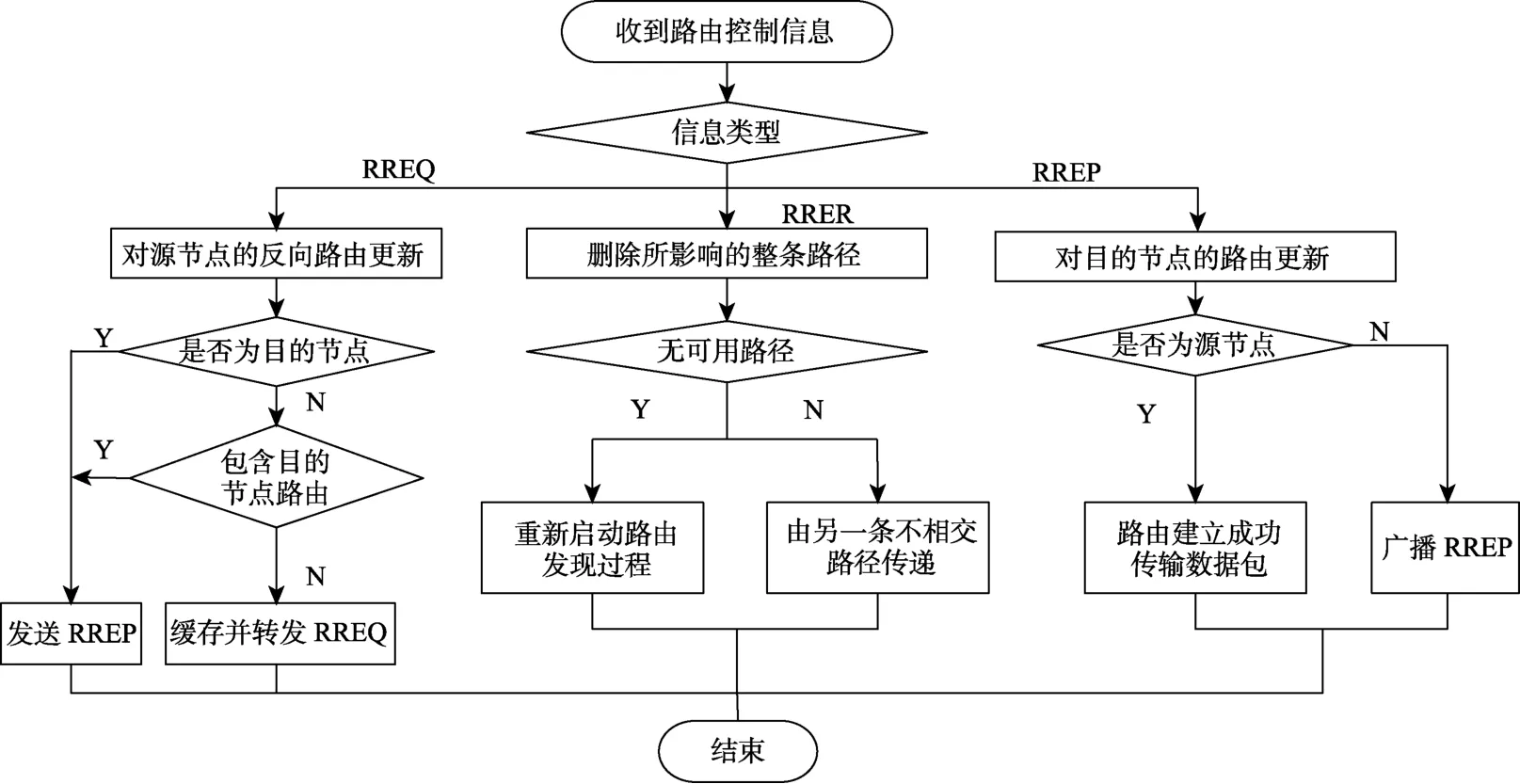
图4 路由控制流程图Fig.4 Flow chart of routing control
例如,在源节点nS和目标节点nD之间有3个不相交的路径X,Y和Z,如图5所示。图中恶意节点nm能够连续广播干扰信号,以干扰路径Y和Z中节点ne和nh的通信,并中断nS和nD之间路径Y和Z的整个通信。如果将路径Y和Z选择为两个不相交的节点进行通信,则这种不利的情况将使多路径路由的好处无效。
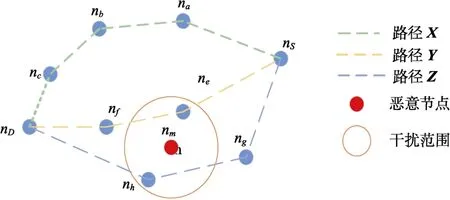
图5 网络示意图Fig.5 Schematic diagram of network
此处,ϖ,σ和ς分别设置为0.2、0.2 和0.6,其中,空间距离的权重大于链路质量和业务负载的权重。当节点收到路由控制信息后,飞行组网抗干扰多路径路由的目的是阻止选择物理上更近的路径,以避免它们被单一的干扰源干扰,并且使端到端的中断率以及网络弹性和性能可以在恶意干扰存在的情况下得到改善。
4 RREP 包接收率影响因素研究
进一步从源节点的RREP包接收速率(用Rrrep表示)来分析所提出的飞行自组网抗干扰多路径路由协议。当源节点接收到与先前发出的RREQ包相对应的RREP 包时,它成功地找到一条将数据包发送到目标节点的路径。假设:网络规模是X×Ym2,其中N节点是均匀分布的,一个数据包损失率ζ由链路质量或链接状态决定。和分别表示目标节点接收RREQ 包和源节点接收RREP 包的概率。Rrrep表示为

本文中,源节点与目标节点之间的平均跳数chop根据文献[21]近似表示为

式中,ℓ 为每一跳的平均进度;d为源节点与目标节点之间的平均距离;R为每个节点的通信范围;ξ是位于R内节点的平均数量。



其中

这里,Rsr是一个RREP 包通过跳数chop被转发回源节点的概率。最后,Rrrep表示为:
图6~8 中,给出了网络中源节点和目标节点之间的跳数和源节点的RREP 包接收速率与节点数量和信道错误率的数值结果。在第2 节中,我们假设无人机在进行数据通信时高度恒定,即在同一水平面内,选取这一水平面中的 1000×1000 m2作为仿真区域,随机生成的节点作为无人机通信节点。在理想情况下,通信模块的能量以各向同性的特性向外扩散,由此建立的模型在通信仿真中广泛应用[22-24]。特别是在无线传感器网络的路由、覆盖、拓扑等仿真设计中,圆形模型被作为通信模型。因此,飞行自组网中节点通信网络覆盖范围为以无人机为圆心通信距离为半径的圆形区域。在仿真中,50~100 个节点均匀分布在一个1000×1000 m2的网络区域内,每个节点的通信距离为300 m,信道误码率为5%~10%。
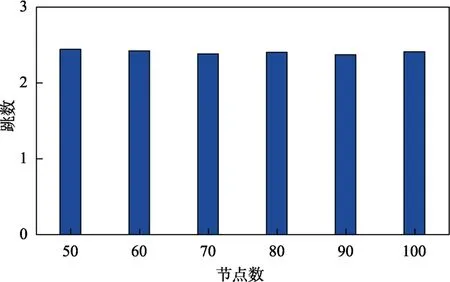
图6 RREP 包节点数与跳数Fig.6 Number of RREP packet nodes and the number of hops
从图6可以看出,源节点和目标节点之间的跳数随节点数的增加变化不是十分明显,所以网络中源节点和目标节点之间的跳数对网络中的节点数并不敏感,从图中可以看出跳数大概稳定在2.427 跳左右。如图7所示,随着节点数量的增加,路由回复包的接收速率变化不大,这是因为随着节点密度的不断增加,源节点与目标节点之间的平均跳数变化不大。然而,接收两个路由回复包的概率比接收一个路由回复包的概率要低,因为在传输过程中,由于信道质量差或链路断开,可能会存在丢失一个路由回复包的情况。在图8中,随着信道误码率的增加,路由回复包RREP报文的接收速率明显降低。这是因为路由请求包RREQ 或路由回复包RREP 在传输过程中丢失的机会更多,信道误码率也更大。
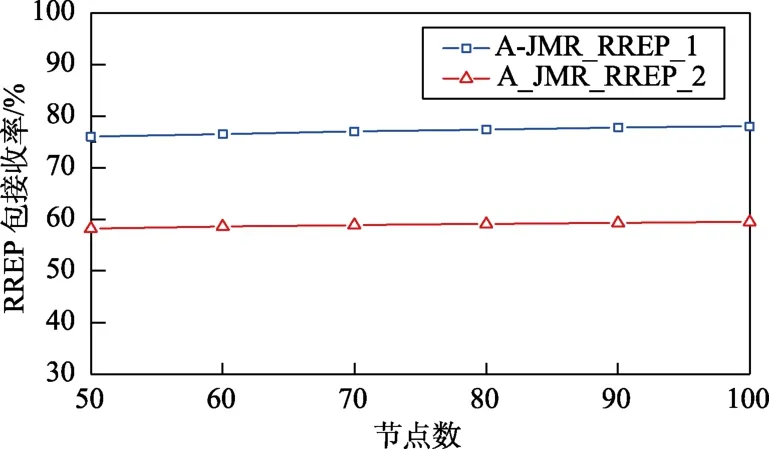
图7 RREP 包接收速率与节点数Fig.7 RREP packet reception rate and number of nodes
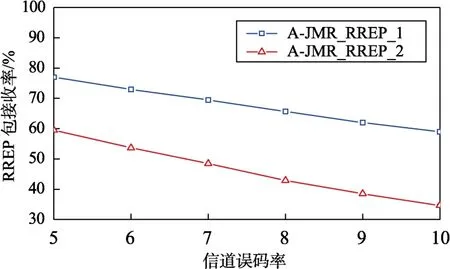
图8 RREP 包接收速率与信道误码率Fig.8 RREP packet reception rate and channel error rate
5 仿真分析
本文使用OMNeT++对所设计的A-JMR 进行仿真实验,以此来评估和分析A-JMR 的性能。在1000×1000 m2的网络区域内进行仿真,在这个区域内均匀分布着 50~100 个节点。节点采用IEEE802.11 p 的无线收发器。节点之间的通信距离设置为300 m,数据传输速率假设为2 Mbps。网络中采用随机路径点迁移模型[25],节点以30 m/s 零暂停地向网络中随机选择的目的地进行恒速移动。源节点以1.0~3.0 b/s 的恒定比特率生成流量包,数据包的大小为512 Byte。仿真时间持续3000 s,各仿真场景使用不同随机生成种子进行10 次重复实验,可以得到较为可靠的性能指标。仿真参数如表4所示。
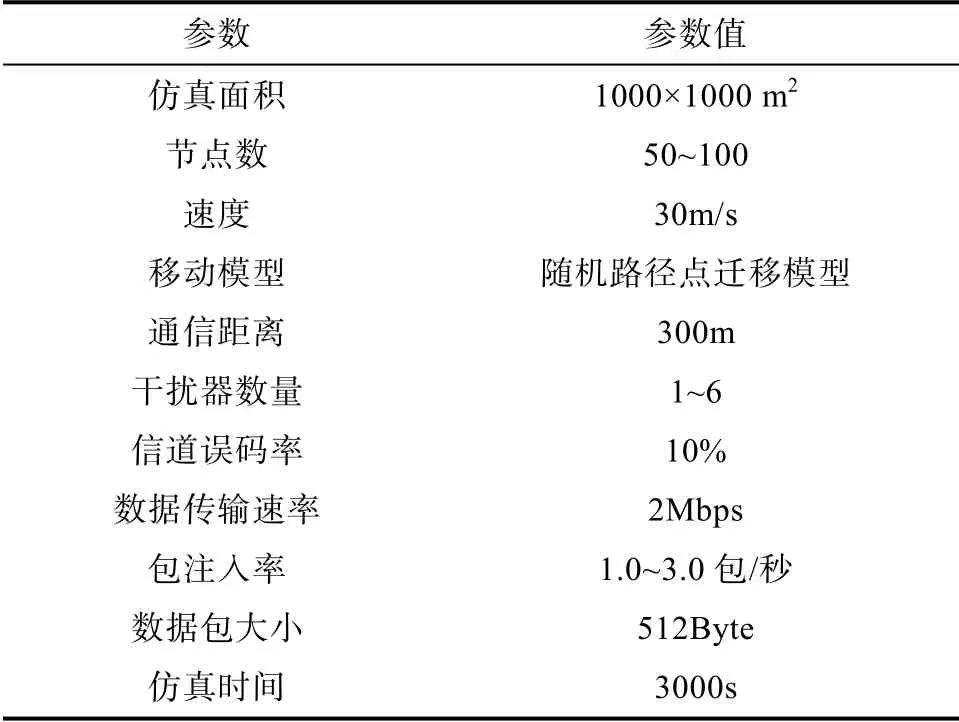
表4 仿真参数Table 4 Simulation parameters
FANETs 路由协议经过多年发展,在不同应用中得到广泛应用[26]。为了比较本文协议的性能,下面介绍3 种有代表性的作为实验对比对象的路由协议,分别是动态源路由(Dynamic Source Routing, DSR)[27]、优化链路状态路由(Optimized Link State Routing, OLSR)[28]和分裂多路径路由(Split Multipath Routing, SMR)[29]。3 种基准路由协议的主要操作简述如下。
(1)动态源路由。当源节点发送数据包之前,会在自己的路由表中搜索到目的节点的路由。若是出现路由不可用的情况,那么源节点将广播RREQ 包,以此来启动路由发现过程。位于源节点和目的节点之间的中间节点的路由表中若没有可以到达目的节点的路由信息,将会在数据包报头中添加其节点地址并再次广播接收到的RREQ。当目的节点收到RREQ 数据包时,会向源节点返回一个RREP 数据包。源节点接到RREP后,使用包报头中承载的完整路由发送数据包。
(2)优化的链路状态路由。节点之间会维护可以在两跳以下就能到达的邻居节点。多点中继(Multipoint Relay, MPR)算法可以使覆盖所有两跳邻居节点所需的继电器数量最小化。仅当发送方节点将数据包选为MPR 时,才会开始转发数据包。为维护路由表,OLSR 周期性地在MPR 上更新链路状态。最后,在每个节点上创建活动路由,以到达网络中任意的目的节点。
(3)分裂多路径路由。当源节点要将数据包发送到路由不可用的目的节点时,源节点会在网络中广播RREQ 包。首次接到RREQ 包时,目的节点会将第一次收到的RREQ 包中搭载的路由信息作为第一个可用的路径,同时源节点将RREP包回复到源节点。目的节点在一段时间进行等待来接收后续的RREQ 包。目的节点选择公共节点数最少并且有回复的路由。最后,目标节点通过第二个选择的路由向源节点发送另一个RREP 包。
5.1 包传递率
首先,通过改变数据包注入速率、节点数量和恶意干扰器数量来测量数据包传递率PDR。随着包注入速率的增加,4 种方案PDR 减小,如图9所示。随着数据包的增加,恶意干扰信号与其碰撞概率越大。数据包传递率减小可能是由于信道质量差导致数据包在传输过程中丢失。其中,A-JMR 体现了最好的性能。因为A-JMR 选择最大空间节点不相交路径来进行数据包的传输。由于包注入速率逐渐增加,在网络中就会有更多正在传输的数据包。若其中一条路径被干扰而导致不能正常地传输,数据包还可以沿另一条与此路径相对应的最大空间节点不相交路径来传输。
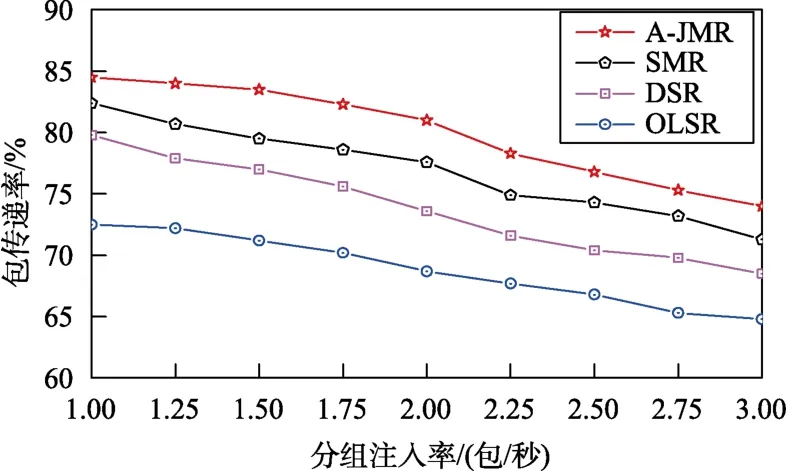
图9 包传递率与分组注入速率Fig.9 Packet injection rate and delivery ratio
网络节点数量增多,路由的PDR 也会随之增加,如图10 所示。节点密度增大,节点周围就会出现更多的邻居节点,源节点和目的节点之间有可以构建出更多条路由来进行数据包的发送。SMR 和A-JMR 的PDR 比另外两个路由高,在SMR 和A-JMR 中是选择多条路径进行传输的,目的节点在有恶意干扰的情况下也可以接收到数据包。尤其是A-JMR 选择的是最大空间节点不相交的路径,受恶意干扰的影响就会小一些,PDR也会显示较高的数值。

图10 包传递率与点节数量Fig.10 Number of nodes and packet delivery ratio
随着恶意干扰的增加,PDR 的曲线明显降低,如图11 所示。但是,A-JMR 比其他几个路由的表现更好,这得益于A-JMR 选择的是优链路质量、轻业务负载、最大空间节点不相交的路径来进行发送。
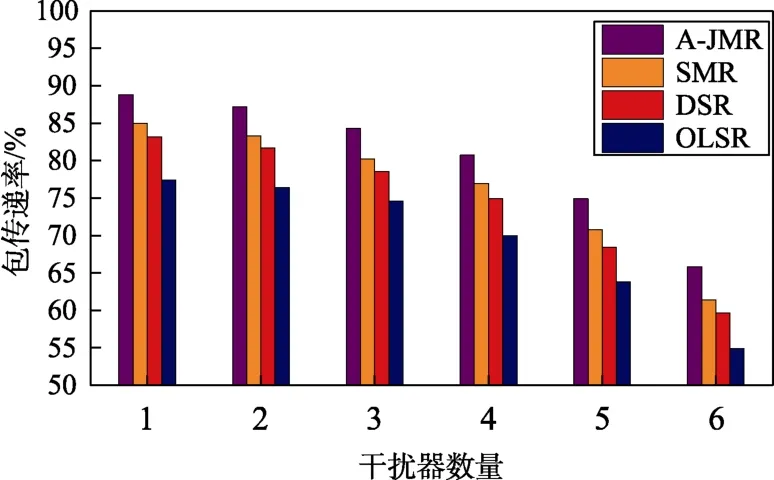
图11 包传递率与干扰器数量Fig.11 Packet delivery ratio and number of jammers
5.2 通信中断率
端到端通信中断率(COR)通过节点和恶意干扰器数量进行测试。随着网络中节点数量的增加,各路由的整体COR 逐渐减小,如图12 所示。随着节点密度的增加,每个节点有更多的相邻节点,因此在任意两个节点之间有更多的路由路径可用。尽管恶意的干扰器可以破坏一定数量的路由,但是仍然有更多的路由路径可用,所以COR呈减少的状态。其中,A-JMR 优于其他3 种路由,在节点数量增加时提供了最低的COR。因为选择最大空间节点不相交路径,干扰信号的半径覆盖两个最大空间距离路径的机会更小。
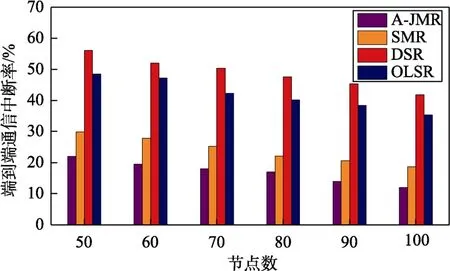
图12 节点数量与通信中断率Fig.12 Number of nodes and end-to-end communication outage rate
如图13 所示,COR 对恶意干扰器的数量非常敏感。随着恶意干扰器数量的增加,COR 显著性增加。恶意干扰器的干扰信号会干扰大量中间节点的接收和发送,从而影响源节点和目标节点之间的整个端到端连接,最终影响路由路径的总数。然而,A-JMR 的COR 值最低,因为在每个路由发现过程中都选择了空间距离最大的两条路由路径。因此,中断的端到端连接数量较少。此外,随着恶意干扰器数量的增加,A-JMR 与其他3 种路由的COR 差异也随之增大。
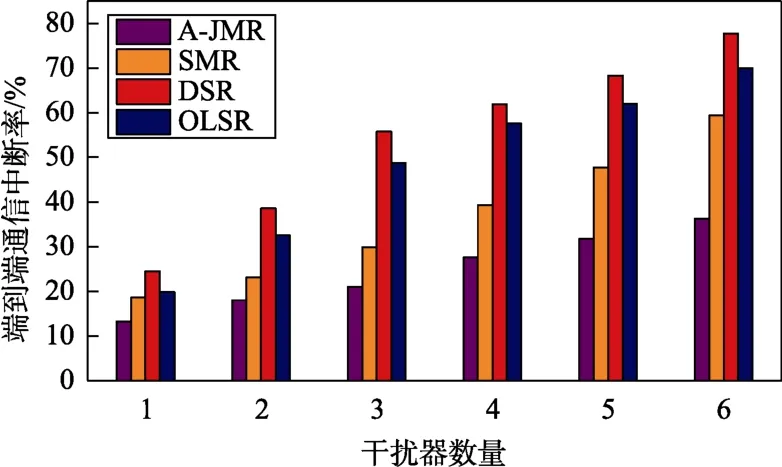
图13 干扰器数量与通信中断率Fig.13 Number of jammers and end-to-end communication outage rate
5.3 传输延迟
本文选择节点数量和恶意干扰器数量的变化来测量数据包发送延迟,如图14~15 所示。改变节点数量时OLSR 的PDL 最低。因为OLSR 是主动路由协议,路由表定期更新和共享,并使用存储的路由路径立即传输数据包没有延迟。对于其他3 种路由,必须启动路由发现过程来查找路由路径。与OLSR 相比,它们可以获得更大的PDL。其中,DSR 的PDL 最高,目的节点使用RREP包来回复第一个RREQ 包,以此来构建源节点与目的节点之间的路径。这条路径有可能会因恶意干扰而引起中间节点不能正常将数据包发送到下一跳节点,在发生这种情况时会重新发送数据包给源节点,以此来重新启动路由发现过程,进而导致PDL 的值提高。SMR 选择最大节点不相交路径,那么所选的几条路径会由于距离相近而同时在干扰区域内,受到这种影响就会重启路由发现过程,这个过程导致耗时增加。
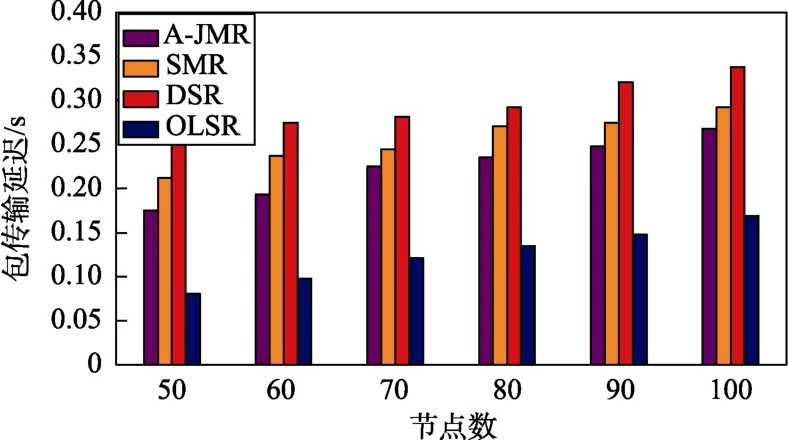
图14 节点数与包传输延迟Fig.14 Number of nodes and packet delivery latency
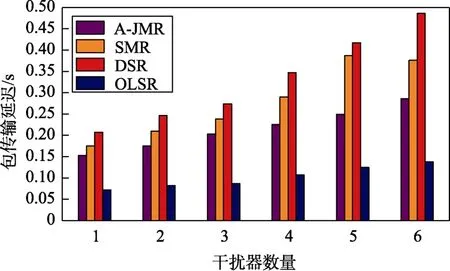
图15 干扰器数量与包传输延迟Fig.15 Number of jammers and packet delivery latency
5.4 实验结果对比
仿真实验通过改变数据包注入速率、节点数量与恶意干扰器数量来对比几种路由协议下的网络性能。
当改变数据包注入速率时,数据包传递率会随着包注入速率的增加而减少。其中,A-JMR 展现了良好的网络性能,在包注入速率增加过程中,其数据包传递率始终高于其他3 种路由。
当改变节点数量时,网络的包传递率、通信中断率与传输延迟均会不同程度地受到影响。当节点数量增多时,邻居节点的增加会成功构建出更多的可用路由,所以包传递率上升,而通信中断率呈下降趋势。A-JMR 与SMR 为多路径路由,因此在包传递率与通信中断率方面比其他两种路由更具优势。在传输延迟方面,OLSR 为主动路由实时传输数据包延迟较小;DSR 与SMR 存在重启路由的情况而导致传输延迟更加明显。A-JMR 选择空间距离最大的两条路由,只要其中一条不在干扰区域就不需要重启,这样平均传输延迟优于DSR 和SMR。
当改变恶意干扰器数量时,SMR 和A-JMR为多路径路由,受恶意干扰的影响较小。其中,A-JMR 选择最大空间距离节点不相交路径,这在包传递率与通信终端率对比实验中有较好的表现。
A-JMR 选择的更优链路质量、轻业务负载、最大空间节点不相交路由进行数据包传输,在包传递率、通信中断率与传输延迟方面都展现了较其他3 种路由更好的网络性能。
6 结束语
飞行自组网是移动自组织网络在交通领域的典型应用,作为新兴的移动自组网技术,它已经得到了广泛的关注。飞行自组网需要突破依赖固定基础设施网络的局限性,逐渐在网络信息站中崭露头角。目前,飞行自组网具有高动态性、间歇性的连接、存在干扰和中断等特征。本文立足于飞行自组网实际应用需求,并针对链路的脆弱性提出了一种具有抗扰性的多路径路由协议,用以为无人机提供有效且可靠的通信数据传输,并在存在恶意干扰时为 FANETs 中提供网络弹性保证。
本文设计了一种具有抗干扰性的多路径路由。通过考虑链路质量、业务负载、空间距离构建了多路径路由模型:通过使用RSSI 的统计信息来估计链路质量;根据等待数据包的平均数量和平均繁忙部分衡量业务负载;最大程度地利用源和目的地之间的空间节点建立最大空间节点不相交路径。由于节点的移动性、业务拥塞、数据包冲突,甚至故意的阻塞和中断,路径的某些链路可能经常断开。根据这些特点设计了适用在飞行自组网中的抗干扰多路径路由。
通过仿真实验验证了所设计的飞行自组网抗干扰多路径路由工程性能并进行了仿真对比。因为所设计的路由选择了多路径的高质量链接、低流量负载、最大空间距离来发送数据包,所以在包传递率、传输延迟和端到端的通信中断率等方面都表现了良好的性能优势。本阶段的研究使用RSSI 的统计信息作为链路质量的评价指标,可以考虑将通信延时与通信带宽等因素加入来衡量链路质量。本文还隐含地假设了双向链路,在后续的研究中可以对单向路由及其他链路情况进行分析,使A-JMR 具有更大的实际应用价值。
猜你喜欢
中国交通信息化(2022年8期)2022-11-20
北京航空航天大学学报(2022年8期)2022-08-31
计算机与数字工程(2022年3期)2022-04-07
北京航空航天大学学报(2021年9期)2021-11-02
今日农业(2021年15期)2021-10-14
民用飞机设计与研究(2020年4期)2021-01-21
计算机与网络(2020年9期)2020-07-29
网络安全和信息化(2019年11期)2019-11-25
传播力研究(2019年24期)2019-10-21
科技与创新(2018年1期)2018-12-23