面向太阳能无人机的自适应扰动步长增量电导法研究
2022-05-18 02:12王正培张晓辉张江浩郑好银
无人系统技术 2022年2期
王正培,张晓辉,张江浩,郑好银,刘 莉
(北京理工大学宇航学院,北京 100081)
1 引 言
太阳能无人机由于其零排放、无污染、可靠性高等优点,广泛应用于电力巡检、农林培育及军事探测等领域中,成为当前国际研究热点[1],具有长时任务值守的应用前景[2]。太阳能无人机在中低空巡航时,由于自身特殊结构以及天空中云彩、飞鸟群、天气变化、飞行姿态等因素的影响,会导致太阳能无人机机翼表面所铺设的光伏电池输出特性曲线产生大幅度、快速的变化。此时,在进行最大功率点追踪时,较大的步长虽然提升了快速性,但会导致系统稳态运行时存在较大的波动。而过小的步长将导致系统跟踪缓慢,无法满足外界环境急剧变化下的追踪要求[3]。因此,开展适应辐照环境快速变化下的最大功率点追踪算法研究具有重要意义。
2 光伏电池输出特性
与化石燃料等传统能源相比,以太阳能为代表的新型能源因其储量广泛、零污染、可持续发展等优点[4],成为理想的新能源替代品,得到了世界各国的青睐[5]。太阳能无人机是伴随着光伏发电技术的进步而逐渐发展的,其突破了传统电动无人机的设计理念[6]。光伏电池是太阳能无人机光伏发电系统中的核心组成部分,具有本征非晶硅薄层的异质结(Heterojunction with Intrinsic Thin-layer, HIT)光伏电池,其同时具备非晶硅与多晶硅光伏电池优势,具有很好的光照稳定性和温度特性,成本低廉并且光电转换效率高[7]。目前,效率最高的HIT 光伏电池是由日本Kaneka公司于 2017年研发设计,其效率最高可达到26.7%[8]。光伏电池由于具有效率高、稳定性好、发电量大等显著优势,已被广泛应用于太阳能飞行器的能源系统[9]。
下面根据蒲公英系列太阳能无人机搭建相应的光伏电池阵列模型,对不同光照强度、温度下光伏电池阵列的输出特性进行了仿真分析,为后续最大功率点追踪算法与控制方法的研究奠定基础。
2.1 光伏电池建模
光伏阵列建模主要的依据是实验室自主研发设计的“蒲公英-IB”太阳能无人机,如图1所示。该太阳能无人机机身长度为 2.5 m,翼展为6.15 m,起飞重量为25 kg,设计最高飞行高度为2000 m。采用上单翼、双尾翼、双垂尾的常规式布局[10]。
根据生产商所给定的Voc、Isc、mV、Im这4个参数,如表1所示,采用工程经验模型,建立太阳能电池阵列仿真模型。
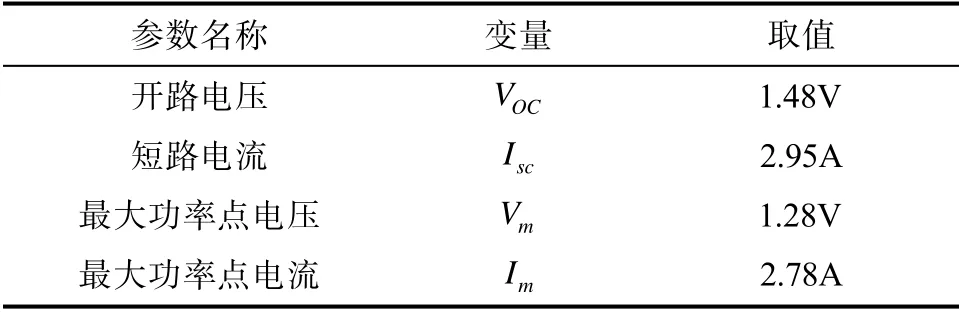
表1 单片光伏电池模型参数Table 1 Photovoltaic cell model parameters
将表1中的单片光伏电池模块进行串并联,得到无人机单侧机翼上所铺设的光伏电池阵列模型,其由8 组三串两并与三组两串两并的光伏电池组构成。为方便展示阅读,图2给出了三串两并的仿真模型。

图2 三串两并的光伏电池示意图Fig.2 Schematic diagram of three series and two parallel photovoltaic cells
2.2 光伏电池输出特性分析
利用斜坡函数与受控电压源组合的方法给予随时间正比例变化的电压值,即可获得某个工况下光伏电池阵列对应的电流参数,从而可以得到单侧机翼光伏电池阵列在不同工况下的电流-电压及功率-电压输出特性曲线。
如图3所示,光照强度的改变会使开路电压发生小幅度变化,但对短路电流影响很大。原因在于当外界光照强度降低时,光伏电池中的 PN 结所激发出的多子与少子的数量减少,导致其光生伏特效应减弱,从而对光生电流产生较大的影响

图3 不同光照强度下光伏阵列输出特性曲线Fig.3 Output characteristic curve of photovoltaic array under different irradiance
不同温度条件下,光伏电池阵列输出特性仿真曲线如图4所示。由图可知,外界温度变化对光伏电池的开路电压影响较为显著,当光伏电池温度升高时,对应的开路电压逐渐减小,对应最大功率点电压也随之减小。由于温度对短路电流影响较小,温度升高时短路电流增加幅度较小,致使温度升高时光伏电池的最大功率会减小。

图4 不同温度下光伏阵列输出特性曲线Fig.4 Output characteristic curve of photovoltaic array at different temperatures
根据图3~4所示的仿真结果可知光伏电池阵列的电流-电压特性曲线与功率-电压特性曲线均是非线性的。由电流-电压特性曲线可知,光照强度与输出电流呈正相关变化。最后随输出电压的增加,输出电流会急剧下降。而温度对电流的影响相对较小。由功率-电压特性曲线可知,光伏电池的输出功率曲线存在唯一的最大值,即最大功率点。在一定范围内光照越强,则光伏电池的最大输出功率越高。为最大化利用光伏电池,使其在外界辐照与自身状态不断变化下总能够以最大功率输出,需要对光伏电池进行实时最大功率点追踪(Maxium Power Point Track,MPPT)控制[11]。
3 最大功率点追踪算法研究
由于光伏电池的电流-电压(I-V)输出曲线是非线性的,在均匀光照的情况下,其功率-电压曲线是一条单峰值曲线,存在唯一的最值点,即最大功率点。而外界环境对光伏电池的最大功率点影响较大,故在实际工程中需要对其进行实时控制,以实现以当前状态下光伏电池以最大功率输出的目的,其实质是将光伏电池的自身阻抗与外接负载进行动态匹配[12]。目前,MPPT 算法大致可以分为以下3 类:(1)基于光伏电池输出曲线特性的数学模型的追踪方法,如恒电压追踪法[13]、短路电流比例系数法;(2)基于采样关键点的直接追踪算法,如扰动观测法[14]、增量电导法[15];(3)基于非线性特性的智能追踪算法,如粒子群算法[16]、萤火虫算法等[17]。下面针对传统MPPT 算法无法同时保证跟踪速度与稳态精度的问题,在传统增量电导算法的基础上提出一种兼具快速且稳态无扰动的改进型最大功率点跟踪算法。
3.1 增量电导法
增量电导法(Incremental Conductance Algorithm,INC)根据光伏电池的功率-电压输出特性曲线的斜率来判断输出此刻的功率状态,以实现最大功率点追踪。根据图5可知,光伏电池的功率-电压图像对应的是一条类抛物线状的可导曲线。假设光电池的发电功率为P,此时光伏电池的输出功率为:

在式(1)中,两边同时对电压V求导可得式(2)

根据图5中INC 法的工作原理曲线可知,dPdV代表曲线的斜率。当dPdV> 0,表示光伏电池阵列的输出功率随电压的增大而增加,此时工作点应在最大功率点左侧;当dPdV=0,表示已到达功率-电压曲线的极值点,即光伏电池的输出功率已到达最大值Pm,此时最大功率点对应的电压即为Vm;当dPdV< 0,太阳能电池阵列的输出功率随输出电压的增加而减少,此时工作点应在最大功率点右侧。
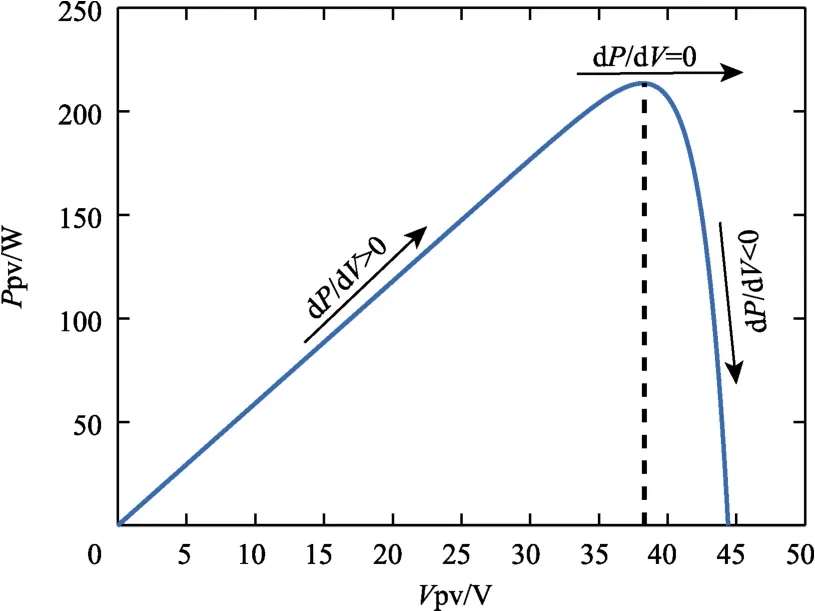
图5 增量电导法工作原理Fig.5 Working principle of INC method
在最大功率点处存在dPdV= 0,由式(2)可得式(3)

即当光伏电池处于最大功率点时,dP/dV=-I/V;当光伏电池目前的工作电压位于最大功率点电压左边时,则有dPdV<-I V;同理,当其位于右边时,有dPdV>-I V。故INC算法的本质是根据dPdV与-I V间的数量关系来判断此刻光伏电池工作电压所处的位置。追踪过程开始时,INC 算法首先需要计算当前时刻dV是否等于0,若dV=0,dI= 0,证明此刻系统已经位于最大功率点处;如果dV=0,dI≠ 0,则需要计算dI此时是否为0 从而进行下一步流程;如果dV≠ 0,则需要按照上文所述的dPdV及-I V与最大功率点间的数学关系来调节参考电压,INC算法流程如图6所示。
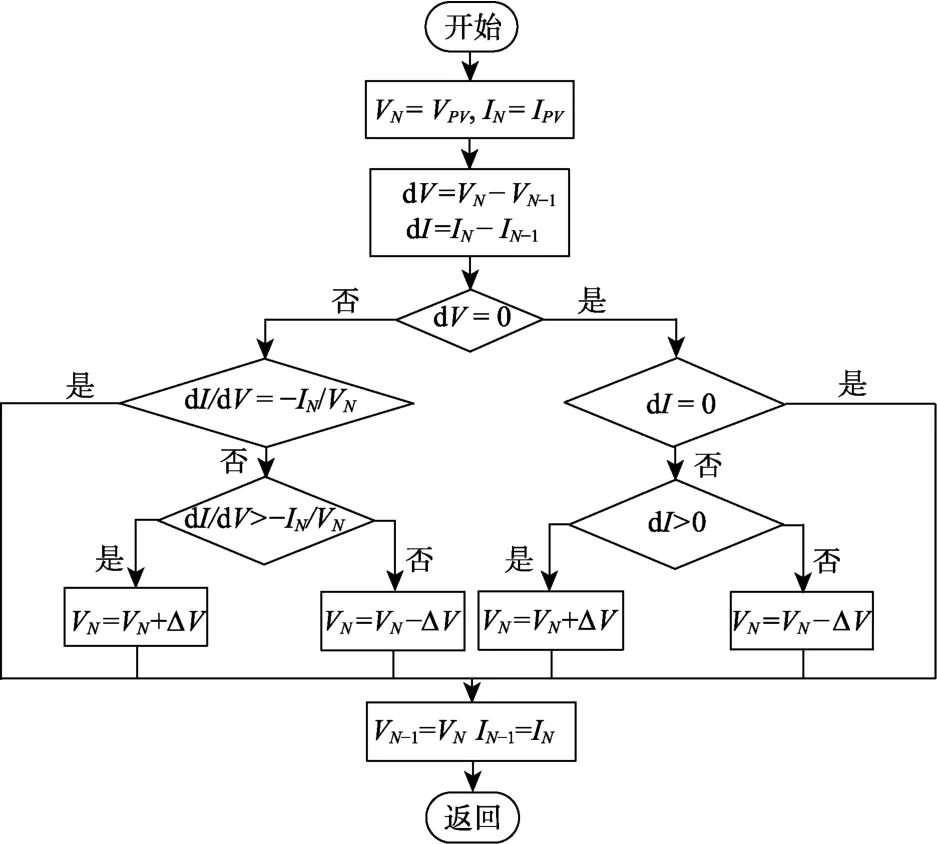
图6 增量电导算法流程图Fig.6 Flow chart of incremental conductance algorithm
INC 法的优点是算法的稳定度较高,响应速度较快,抗干扰能力较强,工作状态受光伏电池的参数的影响较小。但其也有明显的缺点,增量电导算法对运算能力有一定要求,在实际工程中要求处理器有相应的处理能力以保证实时性。增量电导法在实际应用过程中,通常无法同时满足追踪速度与稳态精度。当太阳能无人机在中低空巡航飞行时,会遇到光照强度快速、大幅度变化的情况,此时传统的INC 法会因为追踪缓慢及稳态误差而造成大量功率损失。一些学者提出了改进算法,比如步长变化的INC 算法[18-20]、基于中心差分法的INC 算法[21]、与直接控制占空比结合的INC 算法[22]等。这些方法虽然兼顾了一定程度的追踪速度与稳态精度,但问题并没有完全消除,仅是在最大功率点处减小了扰动步长,使功率振荡问题得到了一定改善,无法彻底解决稳态振荡问题[23]。
3.2 自适应扰动步长增量电导法算法原理
本文提出一种自适应扰动步长增量电导(Adaptive Disturbance Step Incremental Conductance, ADINC)法,旨在同时满足追踪速度与追踪精度的要求,并且能够适应外界环境如光照强度、温度快速变化的工况。固定步长增量电导法追踪示意图如图7所示。可知算法开始时参考电压Vref会朝着最大功率点电压mV持续扰动。但追踪到mV时,参考电压Vref会在mV+VΔ 与mV-ΔV之间来回扰动。步长ΔV越大,Vref追踪到mV的时间越短,但稳态时基准电压变化越大,功率损耗越大。反之,则功率损耗变小,但会增加追踪时间。
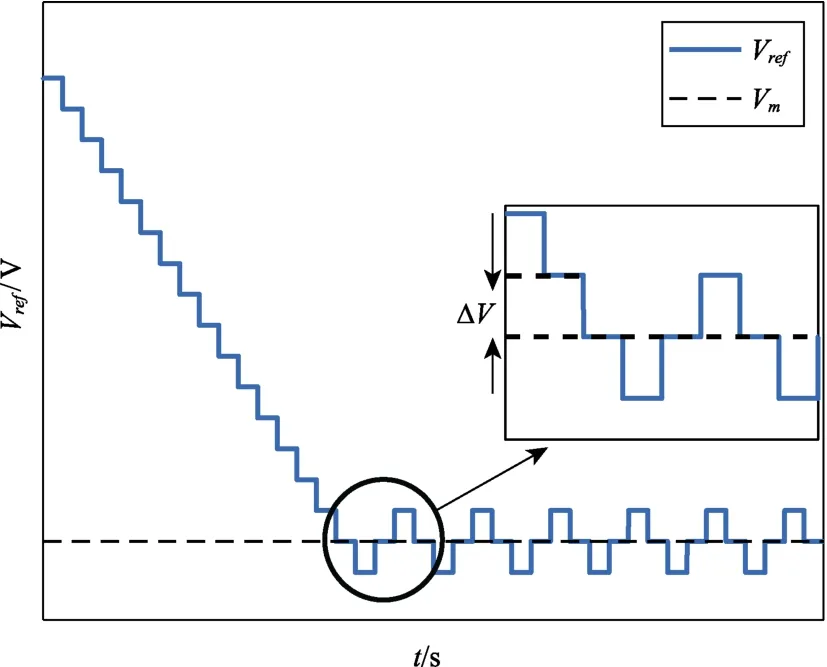
图7 固定步长增量电导法追踪过程示意图Fig.7 Tracing process diagram of fixed step incremental conductance method
若想提高追踪的稳态精度,关键是要判断某一时刻参考电压Vref是否已经达到最大功率点电压Vm。取3 个增量周期内的参考电压Vref分别为VN-2、VN-1与VN,设:
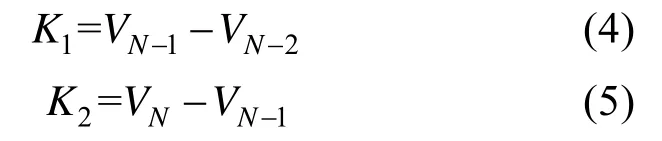
由图7可知,当算法未追踪到最大功率点时,始终VN-1>V N>VN+1,此时有:

当系统追踪到最大功率点并处于稳定状态时,其由MPPT 算法计算获得的参考电压会出现如图8的波动情况,参考电压Vref会围绕最大功率点电压mV上下扰动,即工作点在越过最大功率点后已发生折返现象。此时应有:


图8 增量电导法稳态波形图Fig.8 Steady state oscillogram of incremental conductance method
因此,当K1×K2> 0时,证明系统正处于持续追踪光伏电池最大功率点的状态中;当首次出现K1×K2< 0时,证明当前系统已经追踪到最大功率点并出现了参考电压Vref折返的情况。故将增量电导法的步长ΔV分为两部分。 当K1×K2> 0,使用大步长快速追踪到最大功率工作点;当出现K1×K2< 0时,为防止误判,需要确认此时参考电压已出现工作点连续折返的现象。故每出现一次K1×K2< 0时,将扰动步长减小一定值。当判断持续出现K1×K2< 0时,系统工作点会逐渐逼近收敛于最大功率点,最终实现功率无波动输出。
为提高ADINC 的追踪速度,将恒电压跟踪法与增量电导法相结合。设定初始电压为光伏电池阵列开路电压的85%附近,可大幅度提升最大功率工作点的追踪速度。
外界光照强度与温度对光伏电池的开路电压大小影响较大,也会对最大功率点功率产生影响,故通过实时采样外界环境的光照强度S与温度T。并且加入判断因子1β、2β及3β,分别为:
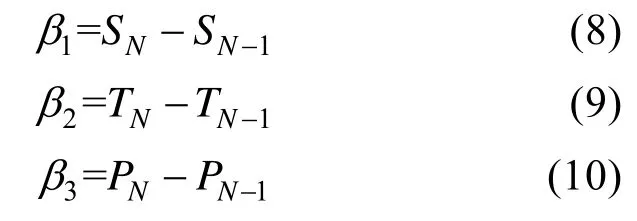
其中,S N与SN-1分别代表本周期与上一周期的光照强度;NT与TN1-分别代表本周期与上一周期的温度;NP与PN-1分别代表本周期与上一周期的功率。若1β、2β与3β均小于所设定的界限值,则说明此时外界环境相对稳定,则算法按照原来的步骤进行。若任一条件不满足,则证明此时外界环境已发生突变,此时若系统工作点已经处于最大功率点并且步长为0 时,应该跳出算法循环并将扰动步长VΔ 恢复为初始值,重新搜索当前条件下的最大功率点。改进后的增量电导法兼具了快速性、稳定性、准确性的特点,在外界快速变化的工作环境中仍然适用。ADINC 法的流程图如图9所示。
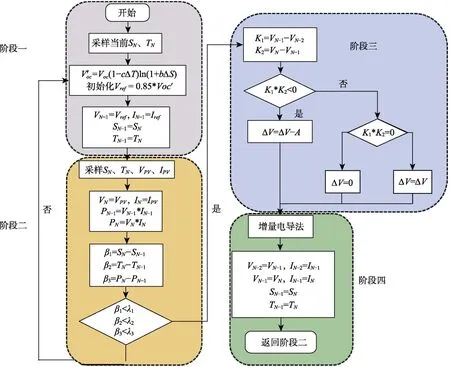
图9 ADINC 法流程图Fig.9 Flow chart of ADINCmethod
由图9可知,该新型算法具体实现步骤分为以下4 个阶段。
(1)恒定电压启动过程。算法开始时首先采样当前时刻的光照强度与温度信息,求出此时开路电压的值VOC。利用恒定电压追踪法的原理将开路电压的0.85 倍设置为初始启动电压,使系统起始工作点处于最大功率点电压mV附近。
(2)工况突变判断过程。阶段二通过计算本周期与上一周期光照强度、温度及功率的差值,判断外界工作环境是否发生突变。其中1λ、2λ和3λ分别表示光照强度、温度和功率被判断为突变的临界值。若发生突变,则重新计算当前开路电压,重复阶段一的过程,使其在外界环境突变情况。若没有发生突变,则继续进行阶段三。
(3)扰动步长选择及消除过程。当系统处于正在追踪Vm的过程中,即K1*K2> 0时,设定ΔV大步长。当K1*K2< 0时,表面系统已经追踪到最大功率点Vm并在Vm附近来回扰动。此时,每出现一次K1*K2< 0时,减小步长,直到系统在最大功率点处的步长调整为0。其中,A为每次所减小的步长。
(4)ADINC 法追踪过程。在所确定的扰动步长下,对最大功率点持续追踪。每完成一次追踪后返回阶段二,对当前环境是否发生突变进行重新判断,并重新选择相应的步长,以此循环。在同时满足快速性、准确性和稳定性的要求下实现对光伏电池阵列最大功率点的追踪。
3.3 稳定光强下仿真结果分析
设定光伏电池阵列工作在标准工况,即光照强度S=1000 W/m2,外界温度T=25oC 。分别采用较小初始步长与较大初始步长获得ADINC 法与INC 法的电压-时间、功率-时间曲线。
图10(a)为采用小步长扰动时电压-时间仿真曲线,可知在MPPT 算法开始时,ADINC 法的参考电压快速定位到开路电压85%处,并在约0.35 s 时追踪最大功率点。此后发生折返,其扰动步长立刻开始减小,并在约0.54 s 时步长降为0,开始进行稳态无振荡追踪。而INC 法约在1.1 s内追踪到最大功率点,之后以大步长持续进行扰动。在相同的外界环境与初始步长下,ADINC 法与INC 法相比,追踪时间提升约68%。
图10(b)为小步长扰动时光伏电池阵列输出功率-时间仿真曲线,可知在算法开始时由于ADINC 法快速将电压定位到最大功率点电压附近,故此时电池阵列输出功率存在阶跃式上升过程,在很短的时间内即达到最大功率点附近,大幅减少了追踪过程中功率的损失。且在达到稳态后,ADINC 法功率不存在振荡。而INC 法虽然已经使用较小的步长,但仍然存在约为0.2 W 的轻微振荡。
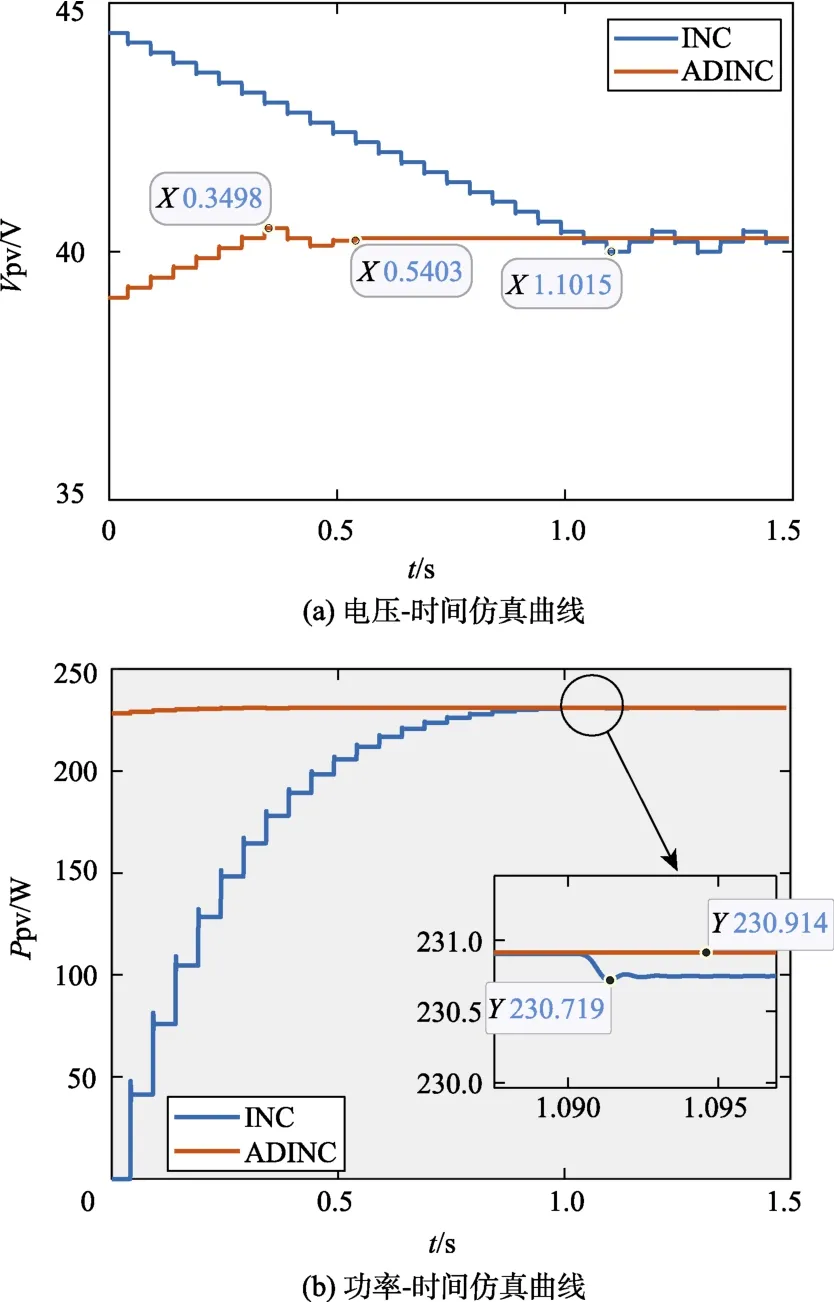
图10 稳态情况下小步长扰动时仿真曲线Fig.10 Simulation curve of small step disturbance in steady state
如图11(a)所示,当以大步长进行追踪时,两种算法都在极短的时间内(0.2 s)追踪到最大功率点。此后,INC 法以大步长在最大功率点电压处振荡,波动较大,造成持续的功率损失。而ADINC 法在追踪到最大功率点后迅速收敛,并在约0.355 s 时达到稳定无振荡跟踪状态。
扰动步长较大时的功率-时间曲线如图11(b)所示。当系统以大步长扰动时,INC 算法虽然也在很短的时间内追踪到最大功率点,但在追踪过程中仍然存在较大的功率损失。当INC 算法追踪到MPPT 时,功率振荡十分明显,最大处有约5.7 W 的功率损失。而ADINC 法在大步长情况下,亦可消除大部分追踪过程中的功率损失,并且在MPP 处十分稳定,能够持续以最大功率无振荡输出,同时满足了追踪速度与精度的要求。
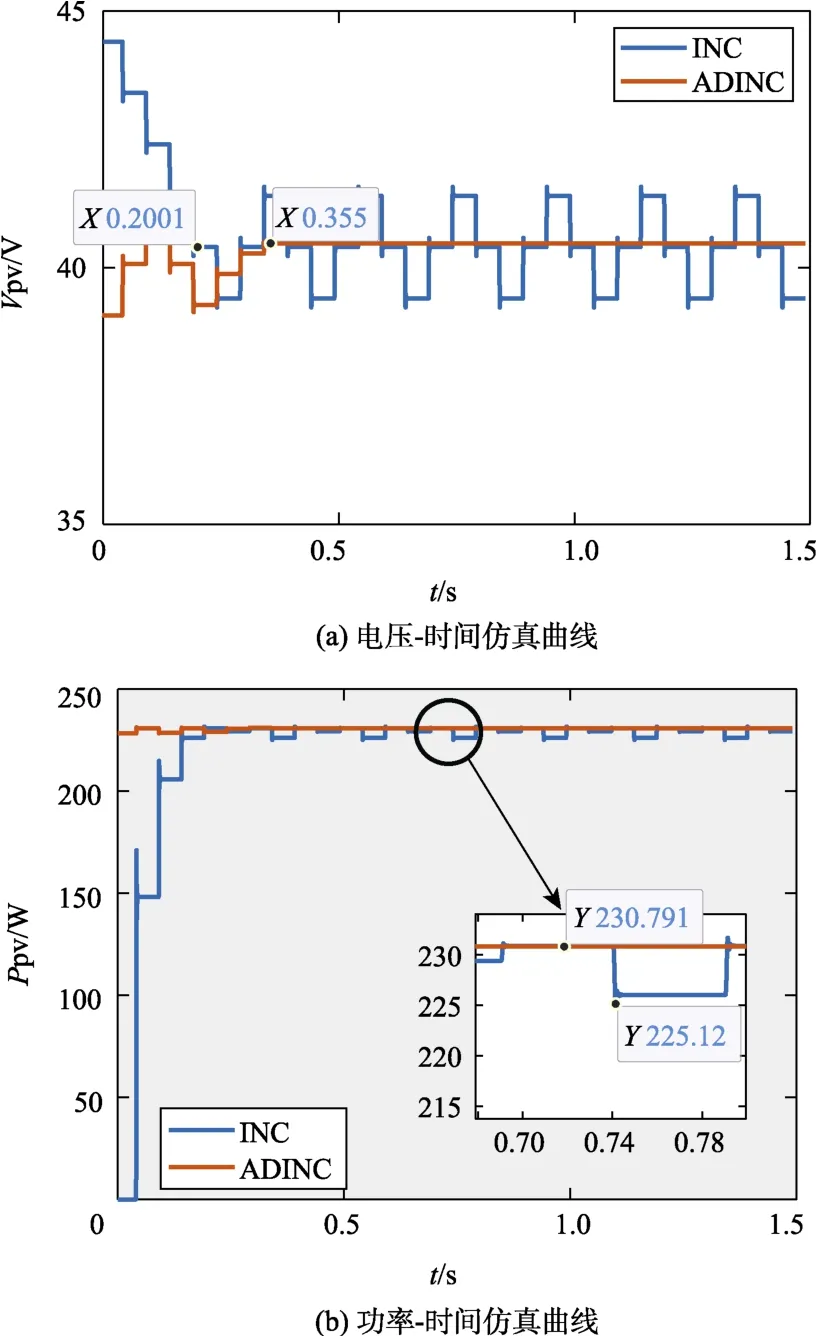
图11 稳态情况下大步长扰动时仿真曲线Fig.11 Simulation curve of long stride disturbance in steady state
3.4 光强大幅度变化情况下仿真结果分析
为了验证所提ADINC 算法,如图12 所示,仿真时设定初始光照强度为1000 W/m2,在1s 时光照强度发生突变,减弱为200 W/m2,持续运行1s 后,光照强度变为600 W/m2。在此之间其外界温度始终保持在T=25oC ,以模拟太阳能无人机所受光照强度发生大幅度突变的工作状况。

图12 光照强度变化示意图Fig.12 Diagram of irradiance change
光照强度突变情况下,0~2 s 内的电压-时间曲线如图13(a)所示。仿真开始时ADINC 法更快的追踪到最大功率点并快速完成收敛,进行稳态无振荡跟踪。在0.1 s 时,光照强度发生大幅度减弱,导致光伏电池的输出电压大幅下降。此时INC算法的追踪电压产生断崖式下跌,而ADINC 法在检测到外界环境突变后,采样光照强度等信息重新计算当前工作环境光伏电池阵列的开路电压VO′C,定义追踪电压为0.85*VO′C。并将步长调整为大步长,仅用0.2 s 重新完成最大功率点的追踪后快速收敛。而INC 算法在外界光照强度大幅度减弱后,电压下降幅度较大,并且仍然以初始固定步长进行追踪,在2 s 时仍然无法追踪到最大功率点。如图13(b)为0~2 s 内光伏电池阵列功率-时间特性曲线,ADINC 法在光照强度大幅突变后快速追踪到新的最大功率点,并且以稳定功率无振荡持续输出。而INC 算法在功率突变后,由于跌落电压较大,追踪速度较慢,没有在仿真时间内追踪到最大功率点,造成大量的功率损耗。
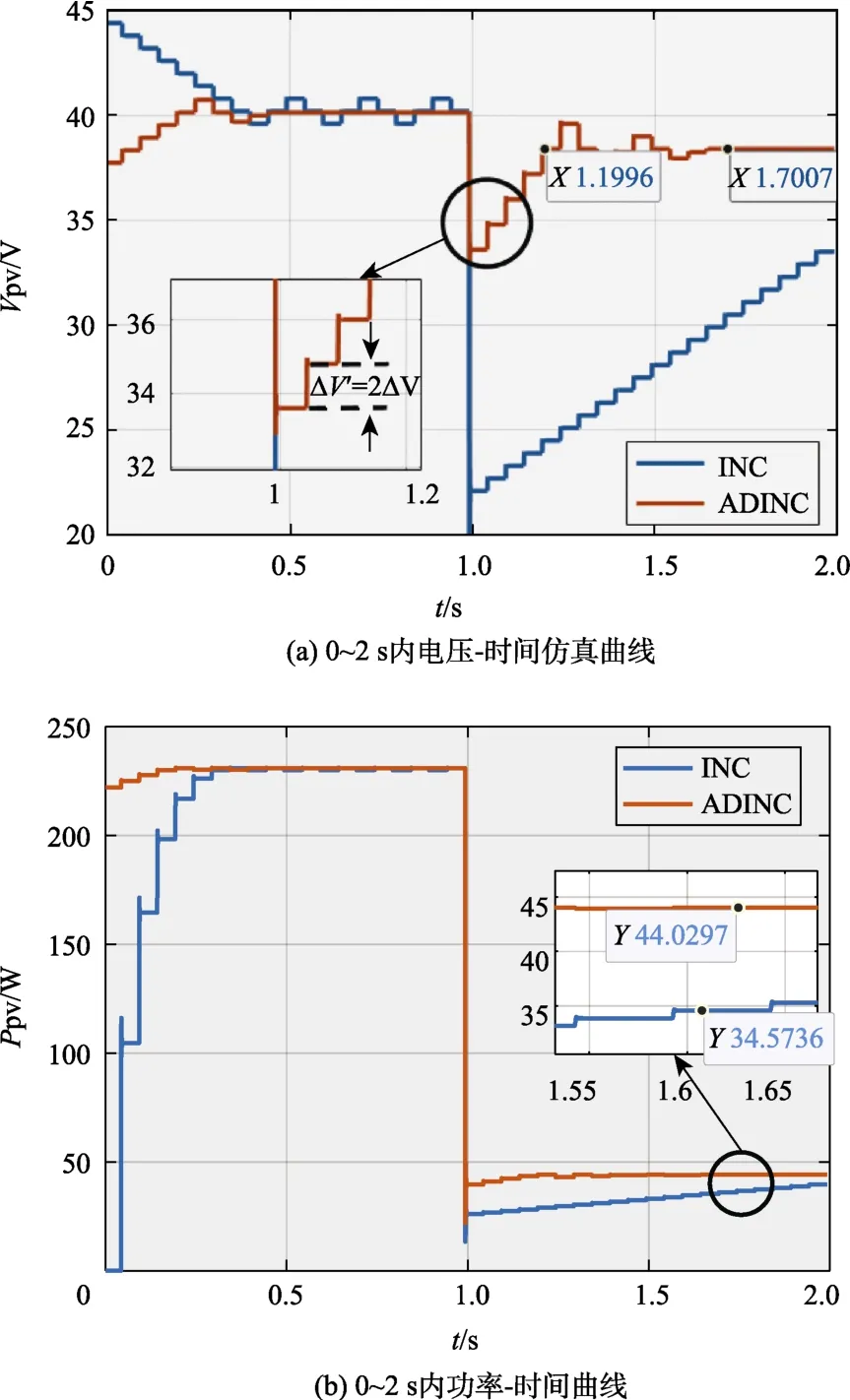
图13 光照强度突变情况下0~2 s 内仿真曲线Fig.13 Simulation curve in 0~2 s under sudden change of irradiance
图14(a)为1.5~3 s 内电压-时间的仿真曲线,可知在 2 s 光照强度突然由200 W/m2增加为600 W/m2时ADINC 法在约2.1 s 时追踪到最大功率点后开始收敛,最终于2.5 s 左右达到稳态。而INC 算法在光照强度上升时,电压发生明显突变,最后以初始步长在约2.5 s 追踪到最大功率点,并在最大功率点处以固定步长持续扰动。由图14(b)中功率-时间曲线可知,在1 s 处光照强度发生大幅突变后,INC 算法在1~2 s 内一直在追踪MPP的过程中,在这段时间内产生了大量的功率损失。在2 s 处功率达到了39.5 W,相较于ADINC 法所追踪到的44 W,仍然存在较大的损耗。在2 s 处光照强度发生骤增时,INC 法与ADINC 法功率都发生激增,但由于ADINC 法定位开路电压的原因,突变后更接近最大功率点。之后快速收敛于MMP 约136.5 W,并达到无振荡状态。INC 算法在以固定步长追踪到最大功率点后开始出现振荡,无法收敛于恒定功率,功率最小处为135.6 W,并在工作过程中持续造成功率损耗。
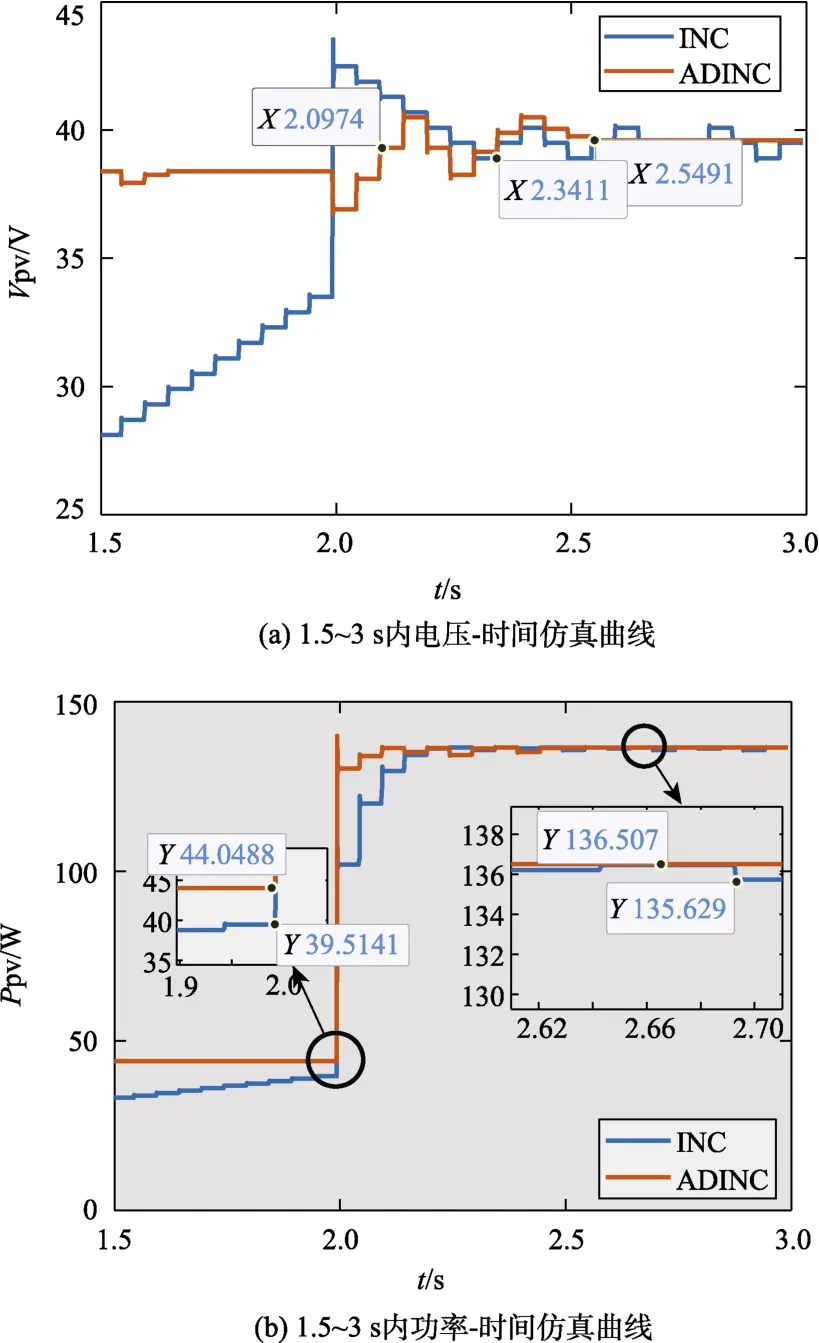
图14 光照强度突变下1.5~3 s 内仿真曲线Fig.14 Simulation curve in 1.5~3 s under sudden change of irradiance
4 光伏发电平台搭建与试验测试
为对提出的ADINC 法进行实时性和有效性测试,基于自主开发的MPPT 控制器,搭建了相应的实物测试平台,如图15 所示。
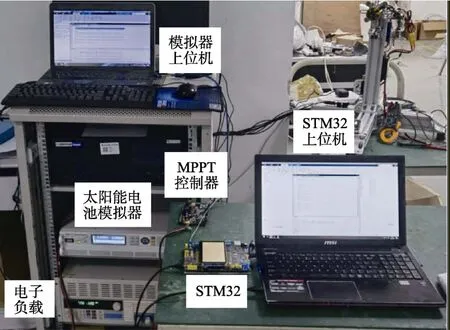
图15 实物测试平台Fig.15 Construction of test platform
其中,太阳能模拟器能够精准模拟各类光伏电池阵列的输出特性,并能够在外界环境变化的情况下快速模拟当前光伏电池阵列的I-V特性曲线。其最大功率为510 W,最大开路电压65 V,最大短路电流为8.5 A。电子负载可精确模拟不同用电设备的负载状态,具有恒压、恒流、恒阻等工作模式,并具有过流过压保护功能。其最大功率为1800 W,输入电流范围为0~240 A,输入电压范围为0~150 A,电压与电流的测量精度分别为10 mV 与1 mA。STM32 开发板通过CAN 总线通信采集MPPT 控制器的电压、电流等信息,并通过自身串口以10 Hz 的频率传输至上位机,进行数据记录。
基本试验流程为:通过模拟器上位机向光伏电池阵列模拟器发送指令,模拟光照条件稳态或变化的情况,获得当前状态下光伏电池阵列的四个关键参数:开路电压Voc、短路电流Isc、最大功率点电压mV及最大功率点电流Im。光伏电池阵列模拟器收到指令后迅速模拟当前光强下输出特性曲线,通过MPPT 控制器进行最大功率点追踪后为电子负载供电。追踪过程中的数据通过STM32 传输至上位机,以便保持分析。
4.1 稳定光强下实物测试结果
当光伏电池阵列发电系统以小步长扰动时,其实物测试结果如图16 所示。由图16(a)中电压-时间曲线可知,INC 算法约在1.25 s 追踪到最大功率点,其后围绕最大功率点电压持续扰动。而ADINC 法在0.62 s 时即追踪到最大功率点,并在约1 s 时完成收敛。与传统INC 算法相比,改进后的算法在该情况下追踪速度加快约0.63 s,提升约50.4%。
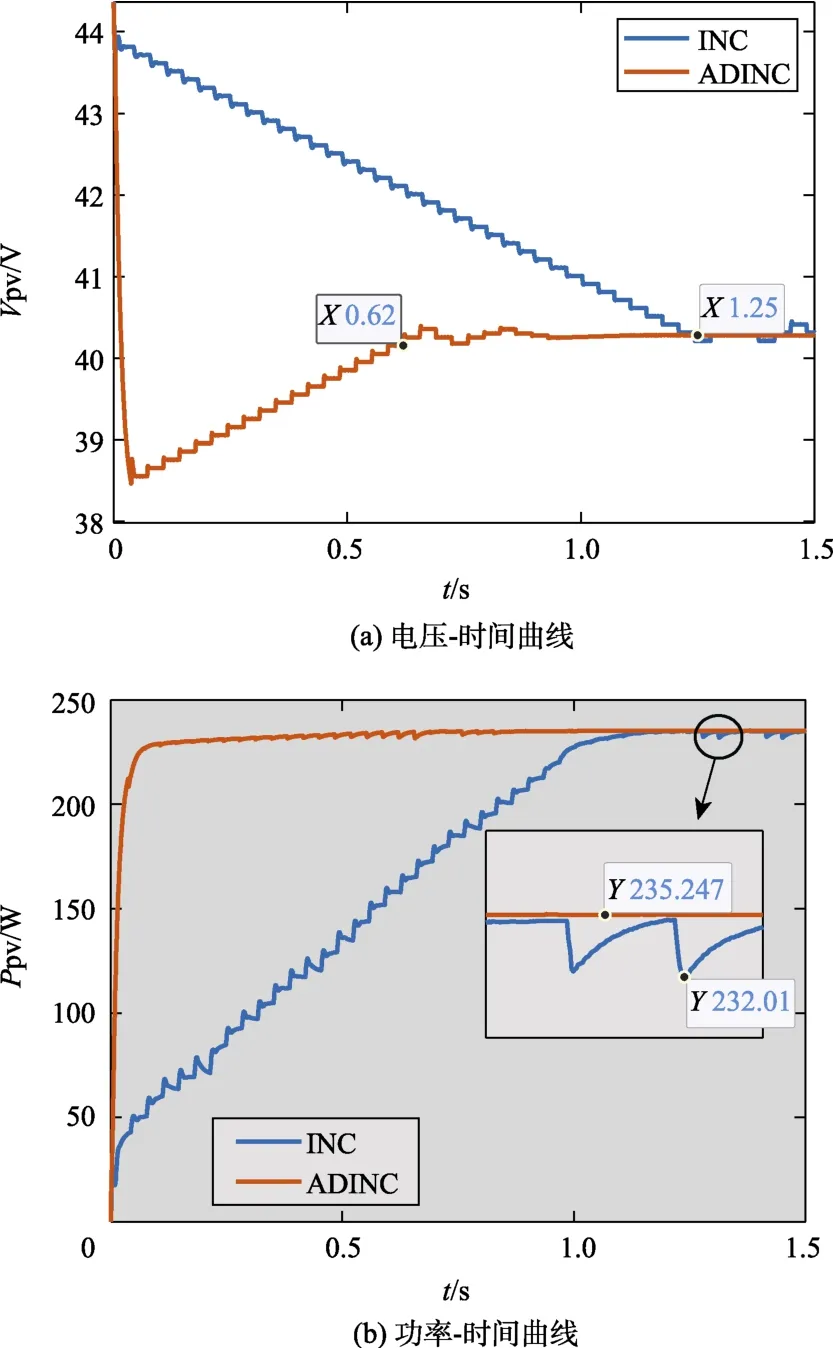
图16 小步长扰动实物测试结果Fig.16 Test results of small step disturbance
当光伏电池阵列系统以较大步长扰动时,其实物测试结果如图17 所示。由图17(a)可知,追踪过程开始时两种方法都在很短时间内追踪到最大功率点,改进后的算法相较于INC 算法,其追踪时间减少约0.18 s,追踪速度提升约46.5%。
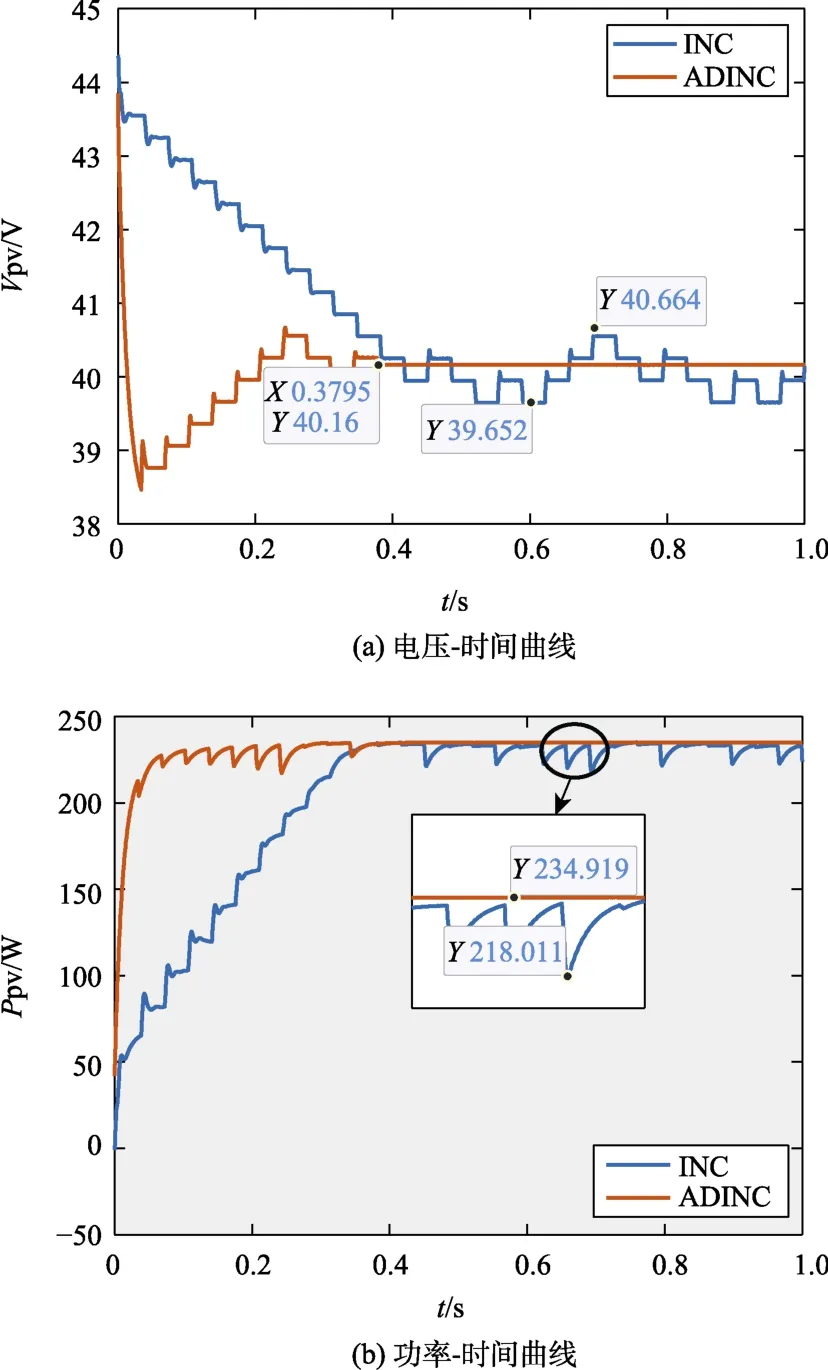
图17 大步长扰动实物测试结果Fig.17 Test results of big step disturbance
4.2 光强大幅度变化情况下实物测试结果
光照变化情况如图12 所示。光照强度突变情况下,0~2 s 内的测试结果如图18 所示。根据图 18(a)中电压-时间曲线可知,当光照强度从S=1000 W/m2突降为S=200 W/m2时,由于光伏电池阵列外部等效阻抗无法突变,此时INC 算法下电压会大幅降低,导致其无法在1 s 内重新追踪到新的最大功率点,从而造成很大的功率损失。而改进后的算法在光强突变后重新将光伏电池阵列电压定位在0.85×VOC处,之后仅用0.73 s 便重新追踪到最大功率点后完成收敛。
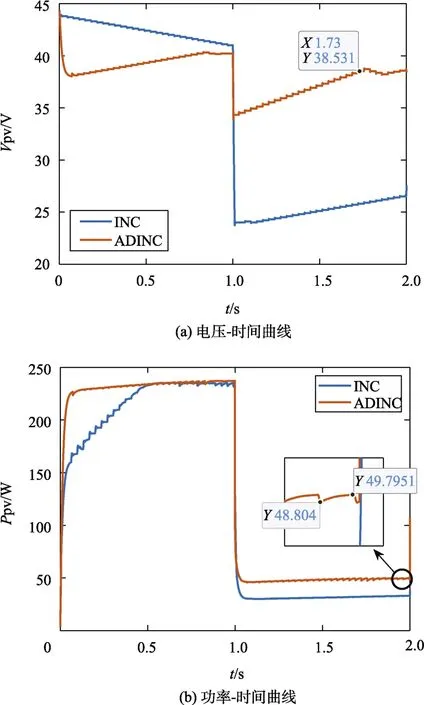
图18 光照强度突变情况下0~2 s 内测试结果Fig.18 Test results within 0~2 s under sudden change of irradiance
光照强度突变情况下,2~3 s 内的测试结果如图19 所示。由图19(a)可知,当光照强度突然增强时,INC 算法下的光伏电池电压会发生激增,并且出现较大的振荡。而改进后的算法仍然可以定位到0.85×VOC处,在约2.59 s 后追踪到最大功率点,并在2.82 s 后完成收敛。根据图19(b)可知,INC 算法在光照强度激增时,功率会出现较大幅度振荡。而ADINC 法则可以快速定位到最大功率点附近。在追踪到最大功率点时,INC 法存在一定振荡,最小处功率仅186 W。而ADINC 法收敛于192 W。

图19 光照强度突变情况下1.5~3 s 测试结果Fig.19 Test results within 1.5~3 s under sudden change of irradiance
5 结束语
本文立足于太阳能无人机在中低空飞行过程由于姿态或辐照环境改变而导致的功率损失问题,提出一种ADINC 法,并与INC 法进行了仿真与试验对比研究,所得结论如下:
(1)所提ADINC 方法能够在大幅度辐照扰动时快速跟踪到光伏阵列的最大功率点,相比传统INC,跟踪速度最大可提升50%,对辐照变化的适应能力具有明显优势;
(2)所提ADINC 方法,具有更高的稳定性和更好的追踪效果,相比传统INC,可以明显改善稳态时的功率振荡现象,且最终追踪效率可提升约3%,可更高效地利用太阳翼的发电量;
(3)本文仿真与试验结果在两种不同的工况下,结果基本保持一致,从跟踪速度看,仿真效果相比于试验结果偏乐观;从稳态震荡抑制效果看,仿真与试验效果相当。
仿真与试验结果验证了ADINC 法的有效性、实时性和先进性,为太阳能无人机的高能效飞行提供了有力的支撑。
猜你喜欢
遗传(2022年9期)2022-10-10
湖北大学学报(自然科学版)(2022年5期)2022-09-07
大电机技术(2022年3期)2022-08-06
健康护理(2022年3期)2022-05-26
福建师范大学学报(自然科学版)(2022年2期)2022-03-16
成都信息工程大学学报(2021年5期)2021-12-30
煤气与热力(2021年4期)2021-06-09
西安邮电大学学报(2021年1期)2021-04-19
中华戏曲(2020年1期)2020-02-12
无线电通信技术(2019年4期)2019-06-25