偏心分量误差对POS 解算和激光点云精度影响试验分析
2023-02-05 13:56杨兵战
经纬天地 2023年6期
杨兵战
(辽宁省自然资源事务服务中心,辽宁沈阳 110034)
0 引言
目前航空摄影测量系统主要由机载传感器、机载GNSS 和惯导IMU 等部件集成。IMU 一般在机载传感器生产过程中集成于系统内部,因此IMU 与传感器投影中心之间位置和视准轴的相对关系是固定的,在出厂检校过程中可以得到有效地检测和修正。机载GNSS 测得的定位数据只是GNSS 天线的实际位置信息,但最终要求输出的是相机投影中心的外方位元素,因此需要测量出GNSS 与IMU 之间的相对位置关系,即GNSS 的偏心分量。航空摄影测量生产中,偏心分量的测量坐标系通常是以设备的某个参考中心作为原点;X轴为设备安装正方向,一般也是飞行方向;Y轴在安装平面上垂直于X轴,指向飞行右侧;Z轴按照右手螺旋法则指向飞行正下方。在实际航空摄影测量生产过程中,为保证GNSS 信号接收质量,一般需要保证安装位置开阔无信号遮挡,因此GNSS 天线通常安装在飞机顶部。由于飞机型号和安装条件不同,导致每次设备安装完成后,GNSS 与航摄仪投影中心之间的偏心分量不同,因此外场设备安装完成后都需要航摄人员手动测量准确的偏心分量,这也就不可避免带来误差。为此,本文以徕卡公司的TerrainMapper 机载激光雷达系统为例,对该设备获取的实际航摄资料进行处理,分析偏心分量测量误差对POS 解算结果以及对最终激光点云成果数据精度的影响[1]。
1 试验概况
本文选取了2022 年获取的某地区一组18 pts/㎡激光点云数据以及对应的GNSS/IMU 数据进行处理试验。试验所用数据均由徕卡TerrainMapper 机载激光雷达设备获取,设备配套PAV100 陀螺稳定平台,在数据获取的过程中实时补偿传感器姿态,设备内部集成的惯导是SPAN CUNS5-H 型号IMU,采样频率是500 Hz,配套GNSS 接收器是NowAtel 公司的双频机载GNSS 接收机,安装在飞机顶部,作业时同时接收GNSS 和GLONASS 信号,采样频率为2 Hz。
徕卡TerrainMapper 激光雷达偏心分量测量的坐标系统是以PAV100 的参考中心为坐标原点,X轴指向飞机头部方向、Y轴指向飞机右侧、Z轴朝向飞机下方。在该坐标系统下,PAV100 参考中心至GNSS 接收机相位中心的矢量需外业航空摄影人员手动测量。PAV100 参考中心与惯导IMU 之间的相对位置关系固定,已在出厂过程中完成检定,并在系统内部修正。本次试验数据的偏心分量测量结果为:(X:0.10 m,Y:-0.03 m,Z:-1.17 m)。试验技术流程如图1 所示。
2 偏心分量误差对POS 数据解算精度影响分析
以外业测量的偏心分量数值作为初始值,依次调整X、Y、Z数值,调整值作为引入测量误差后的偏心分量。使用徕卡航测GNSS/IMU 数据处理软件Inertial Explorer 进行轨迹解算,解算方式采用精密单点定位(PPP),处理过程中使用相同的GNSS/IMU数据、精密星历文件以及解算参数,保证除偏心分量之外的各项配置参数一致,以排除元数据和参数配置对解算结果的干扰。以外业测量的偏心分量数值解算的轨迹作为参考基准,另外分别以x、y、z调整后的偏心分量进行轨迹解算,最后将各组解算的结果与参考基准进行比较分析。
根据数据所在地理位置,采用相同的WGS84坐标系统和UTM 投影将各组处理后的轨迹以文本.txt 格式输出。选取测线上部分数据,通过时间关联,比较分析同一时刻各组轨迹相较于参考基准组轨迹的平面坐标和高程误差。试验中选取了4条航线,每条航线选取了6000 个左右的时间点轨迹信息样本进行误差分析,统计结果如表1 所示。

表1 WGS84 坐标系统下POS 处理结果比较分析单位:m
从表1 数据可以分析出,偏心分量X轴和Y轴方向的测量误差,主要影响POS 处理结果的平面精度,对高程精度影响几乎可以忽略不计,偏心分量x和y的误差值会以不同比例传递给东坐标和北坐标。通过进一步计算可以分析出,x和y的误差值以1∶1 直接传递给平面坐标。偏心分量Z轴方向的测量误差主要影响POS 处理结果的高程精度,对平面精度的影响非常小,并且误差值同样以1∶1 传递到处理结果的高程上[2]。
基于以上数据试验结果,本文将进一步分析X轴和Y轴方向偏心分量测量误差与轨迹的东坐标和北坐标精度之间的主要传递关系。
在实际飞行作业过程中,受湍流、侧风等外部因素的影响,飞机的机头方向与飞行方向通常不一致,并且在飞行员保持飞机沿航线飞行的过程中,飞机的机头方向时刻都在变化。在此过程中,PAV100陀螺稳定平台会在数据采集过程中对相机姿态进行实时姿态补偿,保证传感器的正方向基本与航线方向一致。通过PAV100 记录的数据,可以分析出PAV100 各个时刻的姿态补偿信息,如图2 所示。
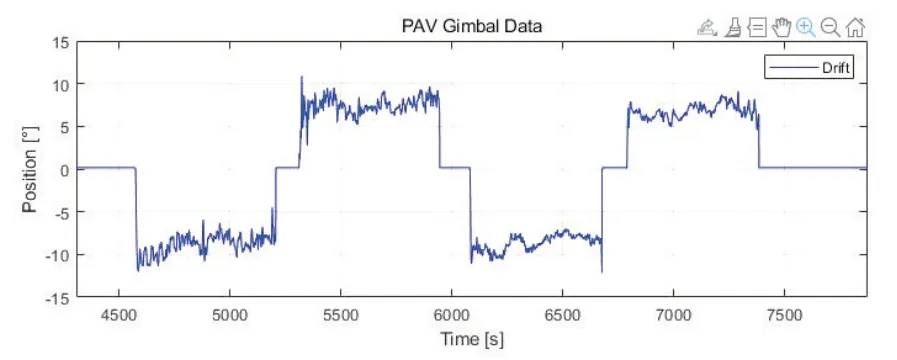
图2 PAV100 姿态补偿信息
PAV100 顺时针运动为姿态补偿正方向。通过PAV100 姿态补偿数据可以看出,航线1 和航线3作业过程中,进行了-7°~-12°范围内的航向角补偿,说明飞机头部方向与航线之间存在+7°~+12°偏离角度。同理,可以分析出航线2 和航线4 作业过程中,飞机与航线之间存在-5°~-10°范围的偏离角度。
结合PAV100 姿态补偿数据可以得出,航线上作业时,飞机的机身角度与航线之间存在实时夹角θ(该夹角不是固定值),这将影响偏心分量测量误差在平面坐标系XOY上的分布方式。经过POS 解算处理后,GNSS 位置信息是真实的,当偏心分量x或y值增大时,将导致误差以某种方式负相关传递给最终轨迹的东坐标和北坐标。基于前文试验结果,偏心分量x值和y值的测量误差会以1∶1 比例在平面精度体现,初步猜测x值和y值测量误差与最终解算得到的轨迹东坐标和北坐标之间存在几何关系。以偏心分量x值的测量误差为例进行分析,其几何关系初步可以假设为式(1)所示:
基于偏心分量误差对POS 解算经度的影响,试验数据中,井字形设计的4 条航线设计角度为205°和25°,结合PAV100 的姿态补偿角度,利用式(1)关系公式,当偏心分量x值增大0.050 m,可以计算出偏心分量x误差值分别传递到轨迹的东坐标和北坐标的误差数值。
将计算得到的误差数据与偏心分量中x的值误差+0.050 m 的数据小组中统计出的实际误差值进行对比分析,最终得到的结果如表2 所示。

表2 POS 处理误差与公式计算误差分布比较分析单位:m
通过表2 可以得出:采用上述公式计算的误差分布与POS 实际解算的误差分布基本一致,验证了前面偏心分量x误差值分布关系的猜测是正确的,因此可以确定偏心分量测量误差与东坐标、北坐标误差的主要传递关系基本可以采用三角函数进行估算。同理,可以得到偏心分量y测量误差与东坐标、北坐标之间的传递关系[3]。
实际上,外业飞行过程中,传感器还存在翻滚角和俯仰角之间的实时姿态变化,结合表2 可以分析出这两个角度对偏心分量的误差传递影响较小,利用偏心分量误差计算轨迹系统误差时基本可以忽略。
3 对激光点云精度影响分析
激光点云的精度很大程度上依赖于轨迹解算成果的精度。偏心分量如果测量不准确,必然导致最终解算的轨迹存在系统误差,采用该轨迹进行后续的数据生产工序,必然会对激光点云成果精度产生影响。
本文采用徕卡HxMap 数据后处理软件,分别利用偏心分量x、y、z测量值调整前以及调整后各小组解算的轨迹进行点云数据处理,处理过程中保证所有使用的参数一致,消除参数变化对处理结果的干扰。处理后得到的成果点云数据,以时间属性作为激光点的唯一性,随机选取其中部分点作为样本分析。以初始偏心分量的处理流程所得到的预处理激光点云为参照对象,将调整偏心分量后各组数据处理所得到点云坐标信息与之进行比较分析。以试验数据中航线4 的点云数据为例,结果如表3所示。
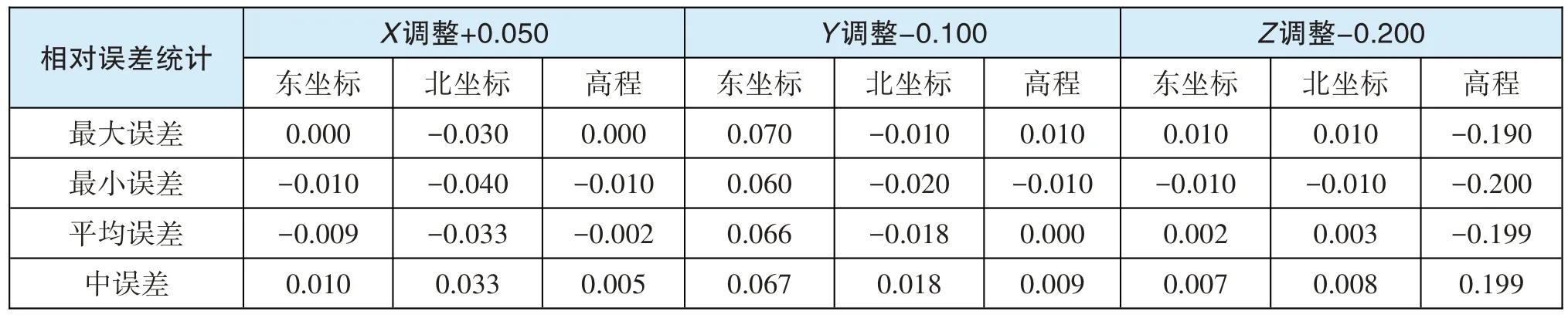
表3 偏心分量误差对激光点云精度影响分析单位:m
结合表1 的误差分布和表3 的点云精度统计可以分析得到:偏心分量的测量误差会传递到预处理后的激光点云数据上,偏心分量x、y的测量误差在传递到点云的平面坐标上会分别有小幅度减小,z的测量误差则会完全反映在点云的高程精度上[4]。
4 结语
综合试验结果分析,得出以下结论:
1)偏心分量的测量误差会传递到POS 的解算结果,并且偏心分量x、y和z值测量误差会分别等比例反映在平面和高程上。
2)偏心分量x、y测量误差与POS 解算的东坐标、北坐标误差之间存在固定的三角函数关系,并且与偏心分量x轴方向和平面坐标系X轴的实时夹角相关;夹角越小,偏心分量x误差值则更多地传递给北坐标,偏心分量y误差值更多地传递给东坐标。
3)偏心分量测量误差导致POS 解算的东坐标、北坐标以及高程上的系统误差,会不同程度对应传递到预处理后的激光点云坐标信息上,并且高程精度会等比例受到误差影响。
猜你喜欢
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
小哥白尼(神奇星球)(2021年12期)2021-03-08
应用数学(2020年2期)2020-06-24
快乐语文(2018年7期)2018-05-25
太空探索(2016年5期)2016-07-12
太空探索(2016年6期)2016-07-10
小说月刊(2015年9期)2015-04-23
电测与仪表(2015年18期)2015-04-12
人生十六七(2015年5期)2015-02-28
雷达学报(2014年4期)2014-04-23