磁悬浮列车磁浮力的计算与分析
2023-12-01 11:13王伟旭孙体佳汤港归
铁道学报 2023年11期
汪 斌,王伟旭,孙体佳,汤港归
(西南交通大学 土木工程学院,四川 成都 610031)
自1842年英国物理学家Samuel Earnshaw提出磁悬浮概念以来,磁悬浮技术得以不断发展。1922年,德国工程师Hermann Kemper提出电磁悬浮原理,于1934年申请了磁悬浮列车的专利,自此磁悬浮技术得以运用到交通运输之中。磁悬浮列车(Maglev Train)是一种无接触的地面有轨交通工具,利用磁吸力或磁斥力悬浮车辆,以直线电动机牵引列车,具有速度域宽、爬坡能力强、噪声小、维修成本低、乘坐舒适和安全等特点[1]。此外,磁悬浮列车与轨道之间不存在直接接触。相比于传统机械式轮轨接触系统,磁悬浮交通避免了轮轨摩擦带来的损耗[2]。因此,磁悬浮列车作为未来的交通运输方式受到世界各国的广泛关注与青睐。磁悬浮列车悬浮模式可分为:电磁悬浮(Electromagnetic Suspension,EMS)、电动悬浮(Electrodynamic Suspension,EDS)、超导钉扎磁悬浮(SPL)[3]。其中电磁悬浮技术出现时间最早,对其进行研究的国家也较多,包括德国、中国、韩国等。电动悬浮技术分为低温超导电动悬浮和永磁电动悬浮,对低温超导电动悬浮技术的研究主要在日本,而对永磁电动悬浮技术的研究主要在美国、中国等国家。超导钉扎磁悬浮也称为高温超导悬浮(High Temperature Superconductor,HTS),其出现和发展相对较新,当前的研究主要集中在中国、俄罗斯、巴西等国家。
磁悬浮列车行驶的轨道大多铺设在桥梁结构(包括轨道梁)之上,使得磁悬浮列车-桥梁耦合系统的动力特性成为磁悬浮列车研究的重点方向。在动力特性研究中,无法避免求解磁悬浮列车-桥梁的动力耦合方程。磁悬浮列车与桥梁间正是通过磁浮作用力进行相互动力耦合,故准确求解磁浮列车的磁浮力尤为重要。本文整理得出电磁悬浮、电动悬浮、高温超导悬浮三种磁悬浮模式中磁浮力的计算式,并系统性地阐述了其优缺点及适用情况,以期能为不同制式磁悬浮列车-桥梁耦合系统或磁悬浮列车-轨道耦合系统的动力特性研究提供基础性参考。
1 电磁悬浮
电磁悬浮(EMS)列车依靠车载电磁铁与导磁性轨道之间产生的磁吸力平衡车辆负载,实现车体悬浮。EMS列车按行驶速度可分为高速与低速EMS列车,其结构见图1。中低速EMS列车采用整体式悬浮与导向系统,即列车的悬浮与导向采用同一套电磁铁系统,利用电磁铁的自复位特性来提供导向力[4]。高速EMS列车采用分离式悬浮与导向系统,即列车的悬浮与导向采用两套相互独立的电磁铁系统。车辆的整个悬浮系统由多个悬浮架串接形成,悬浮架又由电磁铁与推进电机组成。而导向系统则由列车两侧的多个导向电磁铁组成,高速EMS列车具有独立的悬浮、导向功能[5]。EMS列车的悬浮气隙约为8~12 mm,悬浮高度较小。EMS列车电磁力具有开环不稳定性,列车稳定性需要合适的控制系统来维持。从磁吸力的电磁原理出发,高速EMS与中低速EMS的磁浮力计算较为一致,本部分多借鉴公开成果较多的中低速EMS列车磁浮力的计算方法。
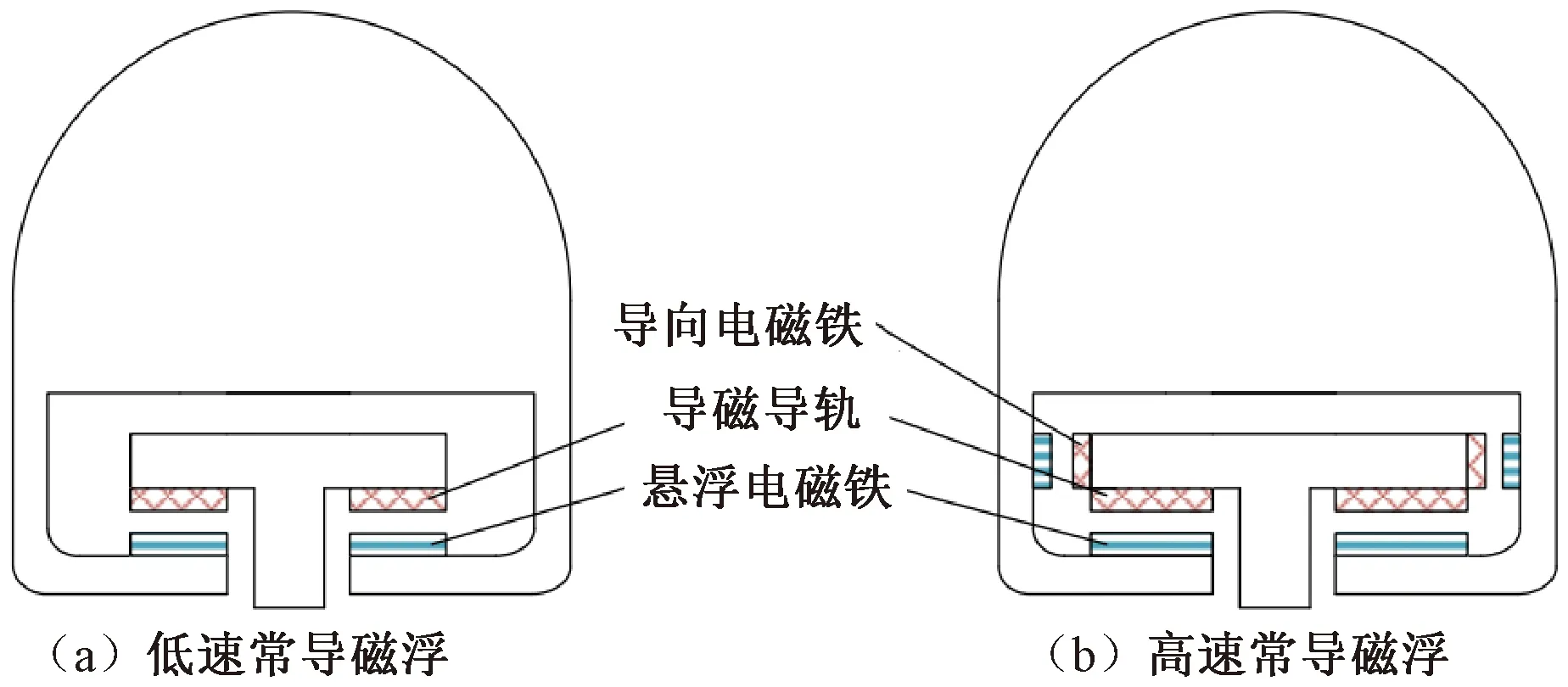
图1 高速与低速EMS列车结构[4]
1.1 EMS列车的悬浮力计算
在早期的研究之中,一般将EMS列车悬浮力与悬浮气隙变化的关系等效为线性弹簧-阻尼模型。即在悬浮平衡位置附近采用线性化的悬浮力与悬浮气隙的关系,悬浮力Fz计算式为
Fz=F0+keΔ+ceΔ
( 1 )
式中:F0为电磁铁的额定悬浮力,一般与负载相等;ke为等效磁隙刚度;ce为等效磁隙阻尼;Δ为悬浮气隙相对平衡位置的变化值。
时瑾等[6]通过对电磁悬浮力特性的研究,为悬浮力线性化的处理方式提供了理论依据。该式成立的条件是Δ非常小,这时悬浮力的高阶分量可以忽略。当气隙波动较大时,受高阶项影响计算结果偏差较大。该线性化悬浮力计算公式在悬浮气隙小幅度变化时具有一定精度,而在悬浮气隙大幅波动的情况下精度降低[1]。
轮轨列车轨道受到的是车轮集中力,磁悬浮列车与轮轨列车在受力的表现形式上存在较大差异。胡基士[7]指出磁浮列车轨道受到的是由悬浮架电磁铁产生的分布式悬浮力,基于此推导得出电磁铁的吸力方程为
( 2 )
式中:i为电磁线圈中的电流;ψ为电磁铁线圈磁链;δ为悬浮气隙。
式( 2 )为非线性微分方程,较难直接求解,在实际工程中,可忽略一些次要因素求解其近似值。如假定电磁铁磁路在不饱和(线性)区段工作,则该吸力方程可简化为[7]
( 3 )
式中:N为电磁铁线圈匝数;G为电磁铁等效总磁导,是气隙的函数,可由磁路计算求得。
若将电流随时间变化的函数代入式( 3 )即可求得EMS列车任意瞬时的悬浮力。
麦克斯韦(Maxwell)电磁吸力是近年来计算悬浮力的经典公式之一,麦克斯韦电磁吸力Fz的表达式为
( 4 )
式中:B为磁感应强度;A为磁极面积;μ0为空气磁导率;Φ为磁通量,Φ=B·A。
式( 4 )简单实用,使用时须满足三个假设条件:①假设定子、转子以及悬浮气隙中的磁场均匀分布;②假设铁芯呈线性不饱和特性;③忽略漏磁和磁滞的情况。由式( 4 )及这三个假设条件可以看出,Maxwell电磁吸力公式存在以下缺点:①不适合电磁铁系统处于极小气隙或大气隙情况下电磁力的计算。当电磁铁系统处于极小气隙条件下时,易出现磁通饱和现象;当电磁铁系统处于大气隙条件下时,易出现气隙磁场分布不均匀或漏磁增大等现象。此时,Maxwell电磁吸力公式的三个假设条件难以成立。②只能计算电磁铁系统中竖向力总的数值大小而无法体现其受力形式,且无法计算电磁铁产生的横向力与纵向力[1]。
针对Maxwell经典计算公式的第一个缺点,即实际情况不符合三个假设条件而造成计算误差,张亦静[8]提出了修正悬浮力后实际的FR的计算式为
( 5 )
式中:FT为Maxwell电磁吸力公式计算的理论大小,即式( 4 )中的Fz;k1、k2、k3分别为磁场不均匀因素、铁芯非线性因素、漏磁因素引起的误差修正系数。
磁场的不均匀性在磁路法计算中主要体现在磁路长度的不同[9]。磁路分布见图2。图2中,l1为任意磁路的长度;l为磁路计算法所选取的中心磁路的长度。根据文献[9]可知,当W<1/10即0.6l≤l1≤1.4l时,选取中心磁路l计算电磁力的误差可以忽略不计,取修正系数k1=1。k2适用于悬浮气隙大于2 mm、小于12 mm的情况,此时其数值大小主要受电磁铁中电流大小的影响。根据文献[8]中的实验,当定子材料为QD122 G-30取向冷轧硅钢片时,使用最小二乘法对k2进行拟合可得式( 6 )。根据文献[8]中计算的误差分布,可以得到不同气隙下电磁力在铁芯线性区间的误差值,进而得到不同气隙下对应的漏磁系数k3,使用最小二乘法对k3进行拟合可得式( 7 )。
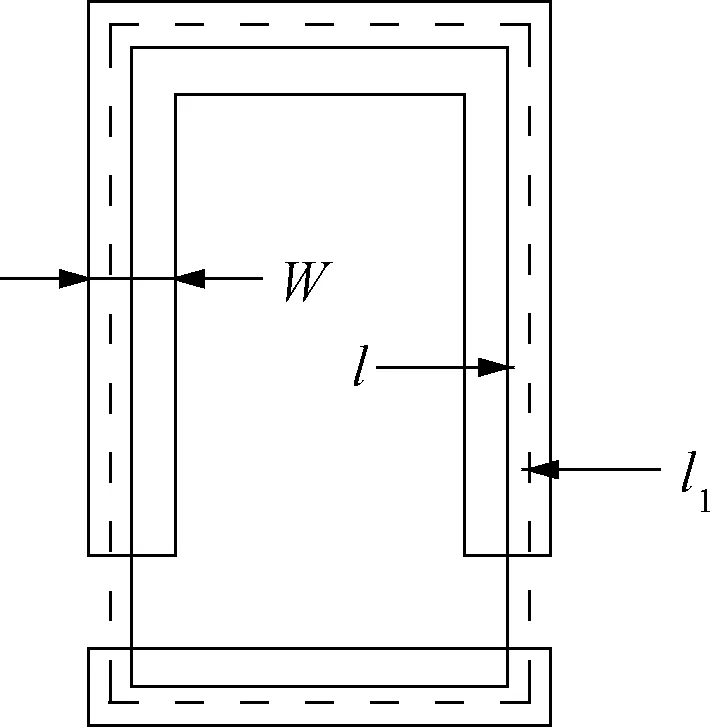
图2 磁路分布图[9]
( 6 )
( 7 )
1.2 三维磁浮力计算
针对Maxwell经典计算公式的第2个缺点,即只能计算电磁铁竖向悬浮力而无法计算其余两个方向的磁浮力,诸多学者对整体式悬浮与导向系统中的三维磁浮力计算进行了研究。Brzezina等[10]为了避免处理电磁铁四角问题时须求解椭圆方程以及进行椭圆积分的麻烦,将细长型矩形磁极对四角问题简化为两个两角问题,见图3。运用保角变换获得了二维平面内的悬浮力Fz与导向力Fy的计算式为
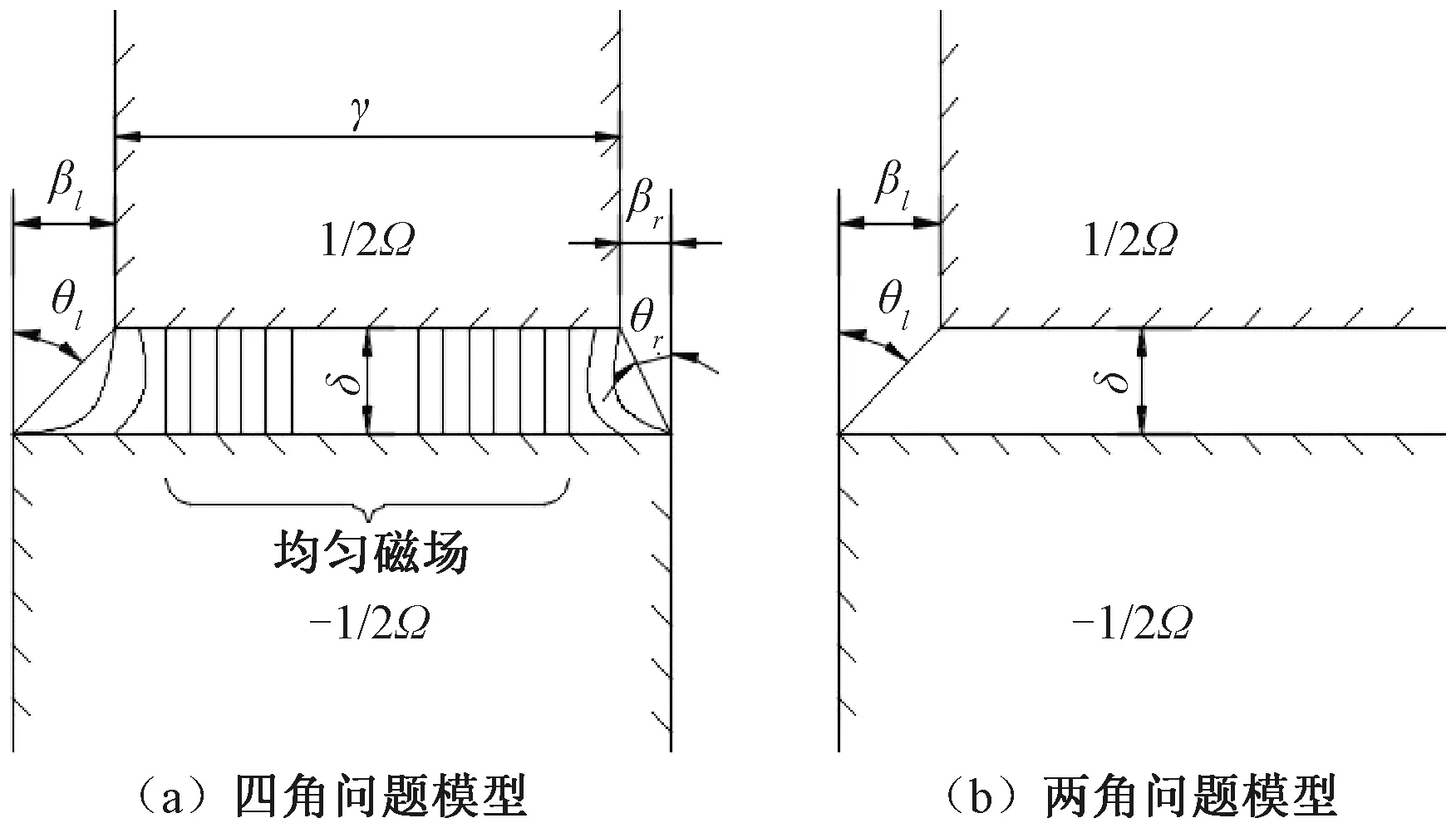
图3 矩形磁极对模型[10]
( 8 )
( 9 )
式( 8 )可进一步简化为[10]
(10)
式( 8 )~式(10)是悬浮磁铁处于小侧滚条件下推导而得的。因为中低速EMS列车均设有防电磁铁侧滚装置,能有效抑制列车运行过程中电磁铁的侧滚运动[11],所以可采用以上公式计算中低速EMS列车的悬浮力与导向力。
除了上述计算二维磁浮力公式,任晓博[4]还根据磁轨横作用关系得出了新的二维磁浮力计算式为
(11)
(12)
式中:Δy为电磁铁与导轨横向偏移量,磁轨横向作用关系见图4。
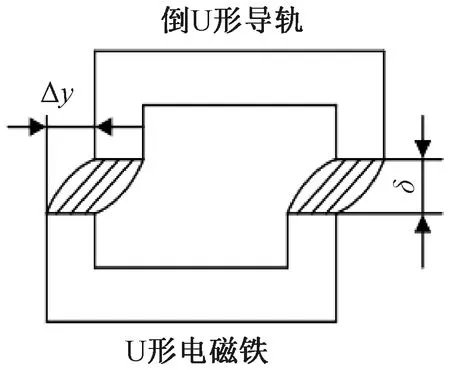
图4 磁轨横向作用关系[4]
由式(12)可知,磁极宽度γ越窄,横向力Fy就越大。横向错位Δy越大,横向力Fy亦越大。中低速EMS列车电磁铁的横向与竖向运动是相互耦合的[4]。当电磁铁与导轨发生横向偏移时,电磁力方向由竖向转变为斜向,斜向电磁力的水平分力将使悬浮模块回复到横向平衡位置。当磁浮列车的悬浮气隙发生变化时,控制系统会改变控制电磁线圈中的电流,电磁力大小会随之改变,其水平分力也会发生变化。
三维磁浮力中还包含沿列车行驶方向的磁浮力,该方向的磁浮力又可分为驱动力与制动阻力。王桂荣等[12]根据EMS磁浮列车运行时所在位置处的定、转子几何分布和载荷分布,用随时间变化的定、转子磁动势和励磁函数来计算驱动磁悬浮列车的凸极直线同步电机的悬浮力Fz(x,t)与驱动力Fx(x,t)分别为
(13)

(14)


(15)
(16)

(17)
其中,dh为电磁铁高度;σ为电导率;v为列车行驶速度;a为磁极宽度。
可以看出,式(15)、式(16)与式( 8 )~式(12)不同,反映了磁浮力大小与列车行驶速度复杂的非线性关系。
1.3 特殊情况下悬浮力计算
前述电磁力计算公式仅针对列车电磁铁与轨道平行的情况,而张耿等[14]基于磁通管法推导了电磁铁位于竖曲线时电磁悬浮力的解析表达式并进行了适当的简化,凹曲线电磁悬浮力Fzajn简化为
(18)
式中:r为竖曲线曲率半径。
凸曲线电磁悬浮力Fztjn简化为
(19)
根据文献[14]中的仿真实验结果可知,在不同情况下所得的拟合曲线基本吻合,且该竖曲线电磁悬浮力简化公式具有较高的精确性。此外,式(18)、式(19)形式与Maxwell电磁吸力公式推导而得的悬浮力计算公式形式类似,且所需参数基本相同。
现有混合型电磁铁大多采用电磁和永磁混合励磁方式,这种混合形式有以下两个优点。第一,提供相同大小的悬浮力时,混合型电磁铁所需的电流相较于纯电磁铁所需的电流要小得多[15],极大地降低了磁悬浮列车的能耗。第二,与相同结构的纯电磁铁系统相比,将系统中的部分电磁铁替换为永磁铁会适当增加悬浮磁铁的承载能力,从而增大列车等效的悬浮气隙[16]。王芸[16]沿用德国TR08磁浮列车架构,将悬浮磁铁部分更换为电磁永磁混合磁铁。进行如下假设:①忽略气隙、绕组和永磁铁的漏磁通;②磁路中铁芯和导轨的磁导率无穷大,磁势均匀地降落在气隙和永磁铁上;③气隙中的磁场均匀分布;④轨道作用面的刚度系数无穷大,不考虑轨道本身的弹性振动或动态形变。推导得出混合型电磁铁中单个闭合磁路产生的悬浮力为
(20)
式中:μm为永磁铁相对磁导率;Sm为永磁铁截面积;Hc为永磁铁矫顽力;δm为永磁铁厚度。式(20)所需参数均为电磁铁与永磁铁自身的固有参数。若取永磁铁厚度δm=0,式(20)退化为纯电磁铁悬浮力Maxwell式( 4 )。
1.4 公式分析
悬浮力计算分为3部分:①将悬浮力与悬浮气隙变化值关系(磁轨关系)线性化,推导得出的式( 2 ),该种方法仅适用于悬浮气隙变化值较小的情况;②将根据磁悬浮系统力学分析的基本关系,假定电磁铁磁路工作在不饱和(线性)区段,简化而得的式( 3 );③Maxwell电磁吸力式( 4 )以及基于式( 4 )提出的修正方程式( 5 );值得注意的是,Maxwell电磁吸力公式须满足2.1节提及的三个假设条件,这三个假设条件往往与实际的工程情况不符,因此,其修正公式提供了以对三个假设条件分别使用三个修正系数为思路的修正计算方法。
三维磁浮力计算包括悬浮力、导向力、驱动力与制动阻力。悬浮力与导向力的计算方法主要分为两部分:①将长型矩形磁极对二维四角问题简化为两个两角问题,运用保角变换推导得出悬浮力与导向力的计算式( 8 )、式( 9 ),该公式适用于悬浮磁铁处于小侧滚条件;②根据磁轨横向作用关系推导得出悬浮力与导向力的计算式(11)、式(12),该公式说明了中低速EMS列车的横向运动与竖向运动相互耦合的关系。磁浮列车的凸极直线同步电机的驱动力式(14)是使用定子、转子磁动势与励磁曲线推导得出的。制动阻力的计算式(16)是通过对气隙磁场分布与电磁铁速度特性的研究分析得出的,该公式反映了制动阻力与列车行驶速度复杂的非线性关系。
特殊情况下的悬浮力计算分为两部分:①中低速EMS列车经过凹曲线与凸曲线的悬浮力计算式(18)、式(19)是基于磁通管法推导得出的,该公式计算参数与Maxwell电磁吸力公式相似,对中低速EMS列车具有一定的适用性;②混合磁铁中单个磁路的悬浮力计算式(20)是根据德国TR08列车架构,将悬浮磁铁部分替换为电磁永磁混合磁铁推导得出的,使用该公式时,除了需满足Maxwell电磁吸力公式的三个假设条件外,还需假设轨道作用面刚度无穷大。
2 电动悬浮
与EMS型列车的悬浮原理不同,电动悬浮(EDS)列车依靠运动磁场在导体轨道中产生的涡流实现斥力悬浮。其斥力较大,可使悬浮气隙达100 mm,降低了列车对轨道变形与控制系统精度的要求。因此,EDS列车具有高速稳定性好,且不需要主动控制等优点。但是EDS列车在静止时无法悬浮,若要使其悬浮,须使列车达到一定的行驶速度,这个速度也被称为起浮速度。因此,在EDS列车起浮之前,需借助轮轨在轨道上行驶。现有的EDS列车按产生运动磁场的物体主要分为永磁EDS列车与低温超导EDS列车。永磁EDS列车的轨道铺设铝板。低温超导EDS列车的轨道最初被设计为铺设导体板,该种结构形式会产生较大的电磁阻力,从而引起较大的能量损耗。为了降低能量损耗,Danby等[17]提出用零磁通线圈(即8字线圈)代替导体板的方案。
2.1 永磁EDS列车磁浮力计算
永磁EDS列车主要是利用Halbach结构排列的永磁体产生的磁场切割导体板,产生感应电流从而达到悬浮状态,具有结构简单且节能的特点。Halbach结构阵列中相邻永磁体的磁化方向相差一个固定的角度。陈殷等[18]使用Ansys软件对Halbach永磁EDS系统受力进行了数值计算,研究了悬浮力随系统参数改变的变化规律,得到悬浮力Fz(d)简单有效的表达式为
(21)
式中:τ为Halbach阵列极距;k为高度极距比;m为气隙极矩比;F0(d)为极距、矫顽力、高度极距比、气隙极距比分别取τ0、Hc0、k0、m0时的受力,也称为反应板厚度为d时的标准力;F(k)、F(k0)为高度极矩比分别取k、k0时的受力。
由式(21)可以看出,悬浮力与极距τ、矫顽力Hc成正比。从文献[18]可知,悬浮力Fz(d)随高度极矩比k、气隙极矩比m分别遵循某一固定曲线,且该曲线不随其他因素变化,具有较好的普遍意义。
李云钢等[19]从电磁感应定律和电磁力定律出发推导得出永磁EDS列车中一个Halbach排列周期内的平均悬浮力Fz与阻力Fx的计算式分别为
(22)
(23)
式中:B0为永磁体产生的磁感应强度;f为空间频率,f=2π/τ;L0为电感;vT=R/kL0,R为导体的电阻。
式(23)物理意义明确,便于理解磁阻力不会随速度增加而一直增加。在一个Halbach排列周期内,导体穿越磁场时的速度v与此时的悬浮气隙δ的变化幅度不大。为计算方便,可假设Halbach排列周期内速度v与悬浮气隙δ为常数。从式(22)、式(23)可以看出,悬浮力随速度增大而增大,但当速度达到一定数值时,悬浮力不再继续增大;阻力随速度增大先快速增大,当速度达到一定数值时,阻力又随速度增大而逐渐减小。
陈殷[20]分别采用麦克斯韦张量法与磁荷法推导得出Halbach阵列永磁EDS列车三维磁浮力的解析计算公式经文献[20]的实验验证,该三维磁浮力的解析计算式的计算结果与实验结果的平均误差仅为1%。
2.2 低温超导EDS列车磁浮力计算
轨道铺设常导8字零磁通线圈是低温超导EDS列车的主要形式。低温超导EDS列车依靠车载低温超导线圈与轨道8字零磁通线圈发生错位时会产生回复力的特性,在能量损耗较低的前提下实现了自悬浮和自导向。王琳[21]从描述超导体宏观电磁特性的Maxwell方程出发,确定超导体表面屏蔽电流的分布,进而求得低温超导EDS系统中的两同轴环形线圈的轴向作用力(静态悬浮力)Fz的计算式为
(24)
张娟[22]通过推导发现,一对交叉连接的8字线圈和超导线圈之间的悬浮力和导向力与线圈间的相对位置和车辆运行速度有关。并且导轨线圈随着超导线圈纵向运行,受到的力为简谐分布力,周期为τsc/v,τsc为超导线圈极距。得到列车纵向运行时引起的左、右两侧超导线圈受到的总的悬浮力Fz1、Fz2和总的导向力Fy1、Fy2的计算公式。
这对于确定参数的低温超导EDS系统,悬浮力与导向力大小主要受列车运行速度的影响,其次受悬浮气隙与导向气隙的影响。
Cai等[23]基于动态电路理论,建立了8字零磁通轨道线圈无交叉连接EDS列车系统中悬浮导向结构的等效电路模型,采用能量法推导得出超导磁体与轨道线圈间的悬浮力Fz、导向力Fy、磁阻力Fx的计算公式。使用这3个公式进行计算前须确定列车的速度与悬浮间隙。另外,这3个公式的局限性在于不能完全反映低温超导EDS列车电磁力、速度与加速度的动态特性。
2.3 公式分析
永磁EDS列车悬浮力的计算式(21)虽不具有通用性,但为Halbach永磁EDS系统的悬浮力计算提供了解决思路。永磁EDS列车的一个Halbach排列周期内的平均悬浮力Fz与阻力Fx式(22)、式(23)具有良好的适用性,并且验证了EDS系统中,悬浮力不会随速度增大而无限增大、阻力随速度增大先增大后减小的特性。基于麦克斯韦张量法和磁荷法两种不同的方法,均可得出永磁EDS列车的三维磁浮力计算公式。
低温超导EDS列车的悬浮力计算公式不具有通用性,但其揭示了低温超导EDS系统的中悬浮力与线圈电流、间隙变化之间的关系。低温超导EDS列车总的悬浮力与导向力计算公式展现出低温超导EDS系统中悬浮力与导向力第一影响因素是列车运行速度,其次是悬浮气隙与导向气隙。低温超导EDS列车的三维磁浮力计算公式是基于动态电路理论,采用能量法推导得出的。
3 高温超导悬浮
超导体具有两个基本特性:①零电阻,即当温度低于一定值后,超导体的电阻低至现有设备无法测量得到;②迈纳斯效应,即超导体无论是在场冷(使超导体先降温,后施加磁场)条件下还是在零场冷(先给超导体施加磁场,后降温)条件下从一般态相变至超导态,超导体的磁通量恒等于零。其中迈纳斯效应是区别理想导体与超导体的重要依据。与超导体不同,理想导体除了具有零电阻特性外,在其降温过程中导体内的磁通量冻结不变。迈纳斯效应与理想导体的情况见图5。图5中,N表示导体处于一般态;S表示导体处于超导态。高温超导悬浮中的“高温”是相对低温超导电动悬浮中的“低温”而言的,低温超导须使温度接近绝对零度,即达到-269 ℃,高温超导仅须使温度达到-196 ℃。
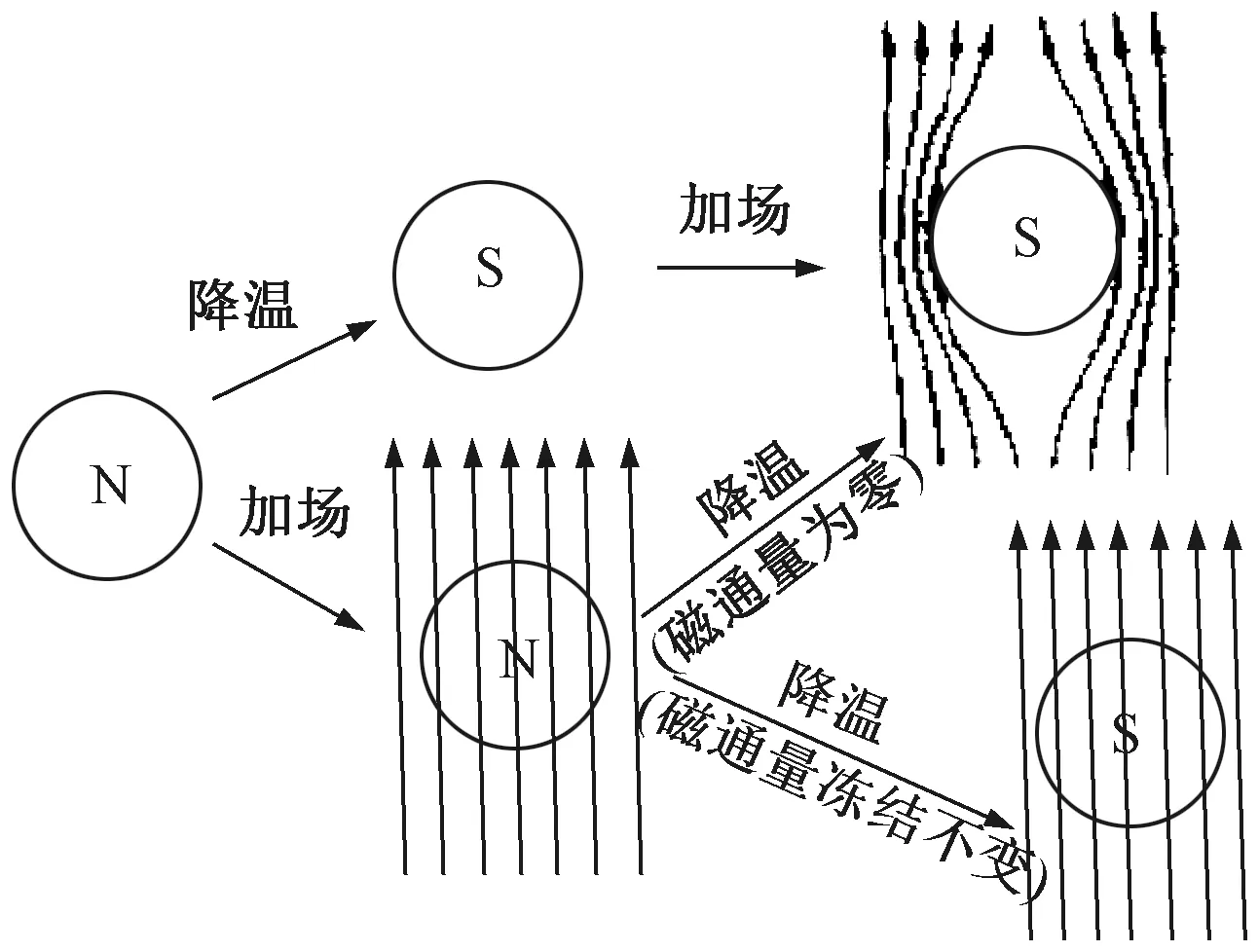
图5 迈纳斯效应与理想导体情况比较[24]
高温超导悬浮(HTS)列车采用永磁体做轨道,高温超导体置于列车之上。HTS列车一般采用非理想第二类高温超导体作为车载磁体,该导体内存在晶体缺陷,磁通线会受这些缺陷束缚从而出现磁通钉扎现象。利用非理想第二类高温超导体在混合态中的磁通钉扎效应可实现HTS列车自悬浮、自导向和沿永磁轨道前行[3]。HTS列车的悬浮与导向均通过磁通钉扎效应实现,具有无需主动控制、自稳定、自悬浮、自导向等特点。相较于低温超导EDS列车而言,HTS列车还能实现静止悬浮,无需辅助轮轨。沿行驶方向不存在固有磁阻力,降低了能耗。
3.1 HTS列车的悬浮力计算
高温超导体的电阻为0,其内产生的感应电流会一直存在。由楞次定律,感应电流产生的磁场与引起感应电流的磁场方向相反,刘文旭等[2]指出永磁体与高温超导体之间作用力可表示为
(25)
式中:H为超导体内的场强;M为超导体内的磁化强度;V为超导体内的有效磁化体积。
Hao等[25]采用有限元法分析了HTS系统的悬浮力,并根据涡流分布和力分析结果使用了一种镜像法,以简化HTS系统中单个线圈的饱和悬浮力Fzs计算,其计算公式为
Fzs=2πRaBrFcoil
(26)
式中:Ra=(Rin+Rout)/2为HTS线圈的平均半径;Fcoil=N·Iapp,Iapp为HTS线圈的工作电流;Br为圆柱坐标下镜像线圈在HTS线圈区域感应的磁场分量,其计算式为
(27)
其中,hs=2δ为HTS线圈到镜像线圈的距离;Es和Ks为线圈形状和尺寸对应的参数,根据高温超导线圈参数分别设置为1.044和3.093。
由于单个HTS线圈不仅会受自身感应磁场的影响,还会受到其他HTS线圈感应磁场的影响,这使得镜像法的解析解十分复杂。此时可采用基础的电磁悬浮力计算式为
(28)
式中:Jc为超导临界电流密度;Bp为永磁体中的磁通量密度。
3.2 HTS列车的二维磁浮力计算
张兴义[26]通过对冻结镜像模型的改进,推导得出HTS系统导向力Fy、悬浮力Fz的计算式分别为
(29)
(30)
式中:m1为永磁体简化而得的磁偶极子数量;m2为超导体表面屏蔽电流形成的磁场简化而得的抗磁镜像磁偶极子数量;m3为高温超导体在初始冷却位置上冷却形成冻结磁通简化而得的冻结镜像磁偶极子数量;hf为高温超导体初始冷却时距离磁场的高度。
磁浮力与悬浮气隙、导向气隙具有一一对应关系。值得注意的是,文献[26]中指出该公式无法计算零场冷情况下悬浮系统的导向力,原因是当场冷高度趋近无穷大(零场冷情况)时,式(29)计算所得的导向力为0。
-2Lxμ0[H1sin(krvt)+H2cos(krvt)+C]
(31)
(32)
式中:Lx为高温超导块材沿行驶方向的长度;By、Bz分别为磁感应强度的两个分量;kr为横向力刚度与悬浮力的比值系数,krvt为运动行程;χx、χy、χz均为高温超导块材磁化曲线的几何参数;H1、H2分别为关于sin(krvt)、cos(krvt)的函数;C为不含sin(krvt)、cos(krvt)的常数项,其表达式分别为
(33)

(34)

根据文献[27]中实验,导向力刚度主要受场冷高度和工作高度的影响。当场冷高度一定时,导向力刚度随工作高度的降低而增加,当工作高度一定时,导向力刚度随场冷高度的降低而增加。可见,若需保持SML子系统较高的导向力刚度,可使HTS系统在较低的场冷高度和工作高度下运行。
3.3 公式分析
一维磁浮力计算公式分为三部分:①从微观角度出发,描述永磁体与高温超导体之间的相互作用力,宏观上则表现为超导体与永磁体之间的悬浮力,其计算公式为式(25);②采用有限元法分析HTS系统的悬浮力,然后根据其涡流分布与力分析结果使用镜像法,简化得出饱和悬浮力的计算式(26);③式(27)仅适用于单个HTS线圈的饱和悬浮力计算,HTS系统中多个线圈自身的感应磁场会相互影响,此时可采用基础电磁悬浮力的计算式(28)。
二维磁浮力计算公式分为两部分:①通过对冻结镜像模型改进推导得出HTS列车的导向力与悬浮力式(29)、式(30),其中导向力公式无法计算零场冷情况;②通过对高温超导—永磁混合悬浮列车的磁力特性分析得出SML子系统的导向力、悬浮力与导向刚度的计算式(31)~式(34),由该公式可知悬浮力随场冷高度的增大而增大,导向力刚度随场冷高度、工作高度的增大而减小。
4 结论
本文总结了电磁悬浮(EMS)、电动悬浮(EDS)与高温超导悬浮(HTS)三种不同悬浮模式特性及磁浮力计算方式。主要结论如下:
1)电磁悬浮列车采用常导体作为线圈绕组产生电磁吸力实现悬浮与导向,具有结构简单(无需冷却系统)、可静悬浮等特点。线性化的悬浮力公式简单易用,但仅适用于较小的悬浮气隙变化。悬浮力计算以Maxwell公式最为经典,但在特殊条件下具有局限性,可采用磁场不均匀修正、铁芯非线性修正、漏磁修正将Maxwell公式拓展到极小气隙或极大气隙条件。通过将长型矩形磁极对二维四角问题简化为两个两角问题,运用保角变换可得到小侧滚条件下二维平面内的悬浮力、导向力,也可通过磁轨横向作用关系推导得出二维平面内的悬浮力、导向力。使用定子、转子磁动势与励磁函数或气隙磁场分布特性得到悬浮力、阻力的计算公式。对于曲线轨道、电磁与永磁混合型电磁铁,具有不同的悬浮力计算公式。
2)永磁EDS列车利用车载永磁体与轨道导体板涡流磁场间的斥力实现悬浮,具有结构简单、成本低、车体质量轻、悬浮气隙大等特点。通过磁场数值模拟可获得表达式,为Halbach永磁EDS系统的悬浮力计算提供了思路。在一个Halbach排列周期内从电磁感应定律和电磁力定律出发推导得到了适用性较好的平均悬浮力与阻力计算公式。基于麦克斯韦张量法和磁荷法,可得到永磁EDS列车的三维磁浮力计算公式。
3)低温超导EDS列车利用车载低温超导体切割轨道线圈产生的斥力实现悬浮,具有自悬浮、自导向、悬浮气隙大、无需主动控制,适合高速行驶等特点。从超导体宏观电磁特性Maxwell方程出发,或基于动态电路理论采用能量法,可推导得到磁浮力表达式。有学者提出悬浮力与车辆运行速度有关,建立了反映速度影响的悬浮力、导向力表达式。
4)高温超导悬浮列车利用车载高温超导体与永磁轨道间的磁通钉扎效应实现列车悬浮与导向,具有自悬浮、自导向、高稳定性、悬浮气隙大以及无磁阻力、可静悬浮等特点。从超导体磁场理论或有限元数值模拟方式均可建立超导体与永磁体之间的悬浮力公式,有限元中可采用镜像法模拟涡流分布简化分析过程。通过改进的冻结镜像模型或者磁力特性分析可建立高温超导悬浮列车悬浮力与导向力的公式。
猜你喜欢
小猕猴智力画刊(2022年10期)2022-11-02
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
——磁悬浮列车稳步发展
工程(2021年7期)2021-12-30
机械工业标准化与质量(2021年8期)2021-10-13
防爆电机(2021年2期)2021-06-09
减速顶与调速技术(2021年3期)2021-03-09
科学Fans(2019年2期)2019-04-11
科学大众(中学)(2017年2期)2017-03-21
河南科技(2015年15期)2015-03-11
故事作文·低年级(2009年11期)2009-12-10