水下机器人惯性导航技术综述
2024-01-09 07:06赖昱,朱俊
控制与信息技术 2023年6期
赖 昱,朱 俊
(上海中车艾森迪海洋装备有限公司,上海 201306)
0 引言
水下机器人承担了海洋资源探索、海洋生物调查以及深海作业等任务,对海洋资源的开发至关重要。由于操作人员无法直接通过视觉来判断水下机器人当前的姿态和位置,一般依靠通信手段远程操纵水下机器人,因此,水下机器人必须依靠惯性导航系统(inertia navigation system, INS)来提供其在水下的航向和位置信息,从而实现运动控制。可见,惯性导航系统对于水下机器人的控制至关重要。
经过数十年的研究,水下惯导技术已经有了较为成熟的应用,以往仅用于水上空间的导航技术目前也逐渐应用于水下导航[1-4]。最开始水下依靠惯性测量元件和导航算法组成的惯性导航系统进行导航,称为纯惯性导航。由于水下无法接受卫星信号,纯惯性导航系统的位置信息在系统运行一定时间后会发散。因此,后续发展出了纯惯性导航系统和传感器搭配使用的组合惯性导航技术。最早出现的组合方式是利用声学传感器,通过回声定位或航位推算的方式给惯导系统提供修正数据[1]。后来,研究又集中于水下机器人自带的传感器上,例如多波束声呐、深度计等仪器,通过把这些仪器加入惯导系统,以丰富惯导系统的信息源[3]。目前,随着人工智能技术的发展,依靠地图重构的视觉惯性导航技术[4]又兴起,并有望在未来应用到水下机器人上。
上述惯性导航系统均有成熟研究,且在不同的水下环境及不同类型的机器人上,所适用的方式也不同。同时,大量研究[5-11]也表明了,水下机器人惯性导航系统存在的共性问题是位置信息修正问题。因此,本文总结了国内外部分水下惯性导航相关文献,分析了各类水下机器人惯性导航系统在不同应用条件下的优劣性及其最适用的组合类型,同时研究了各类组合惯导所需的误差修正算法,为未来水下惯性导航系统的研究提供参考。
1 水下惯导组合技术
惯性导航系统是一种利用惯性传感器测量载体的角度及角速度信息,并结合给定的初始条件实时推算载体的速度和位置等运动参数的自主式导航系统。其可搭载在水下机器人上,在机器人运行过程中,提供其相对位置和当前姿态,为机器人航行的路径规划提供重要依据。
基于陀螺仪、加速度计的纯惯性导航系统是水下机器人工业应用领域所有惯性导航技术的基础[1-2]。在自定义的虚拟坐标系中,陀螺仪可以提供水下机器人针对某一坐标轴的角度偏差,而加速度计可以提供其在某一坐标轴上的加速度大小。分别在x轴、y轴及z轴上设置陀螺仪和加速度计,惯性导航系统就可以获得水下机器人在虚拟坐标系下的每一时刻的航向信息及加速度信息; 再结合初始位置或参考点,通过积分可以计算得到机器人的位移,从而计算出机器人的相对位置。
纯惯性导航系统作为水下机器人惯导系统的基础,具有可以依靠自身进行导航的能力。法国iXsea公司开发的Phins 水下惯性导航系统的定位精度可达到1 111.2 m/h。美国霍尼韦尔公司开发的RL34激光陀螺惯导系统,导航精度也大幅提升[1]。由Teledyne公司开发的TOGS 以及Sonardyne 公司开发的LOADSTAR 200 光纤陀螺惯导系统,也实现了较高的精度。另外,在国内也有许多厂家可以开发出工业领域较高定位精度的产品,例如中船航海科技有限责任公司开发的海螺系列光纤惯导系统。
纯惯性导航所使用的陀螺仪与加速度计在自身探测的信息上具有极高的精度,在短时间内对水下机器人的航向、位置反馈较为准确。但是由于传感器定位存在误差,并且在积分过程中误差不断累积,长时间运行使惯导系统计算出来的误差较大。因此,水下机器人的惯导系统往往会选择和其他的测速装置或定位装置组合,如多普勒测速仪(Doppler velocity log,DVL)和超短基线定位系统(ultra short baseline,USBL),通过时间同步与数据融合等手段,成为精度更高的惯导系统,如图1所示。
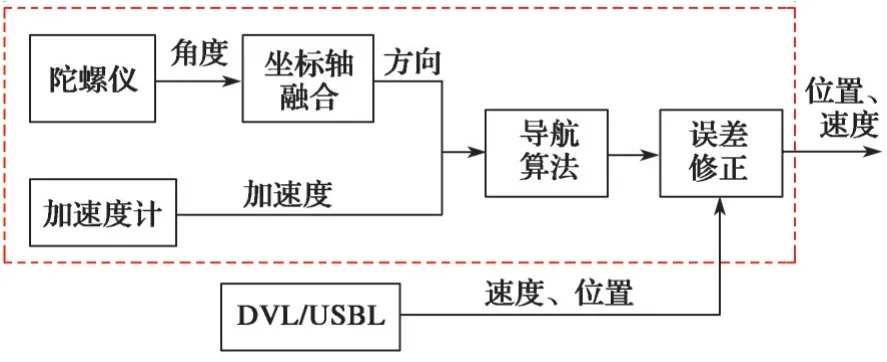
图1 水下机器人惯性导航系统原理Fig.1 Principle diagram of the INS for ROV
这些水下惯导组合以纯惯性导航为主,加上航位推算、地球物理导航、水声导航等方式为辅助,提高了导航精度。目前,又有研究将多种辅助导航方式加入纯惯性导航系统,形成了多传感器组合的惯性导航系统,即以多源信息来辅助主惯性导航系统的误差修正,这样可提高惯性导航的精度和可靠性,保证了水下机器人的顺利运行。表1 为目前常用的几种水下惯导组合方式的优缺点对比。

表1 水下惯导组合Tab.1 Combination of underwater INS
1.1 惯性-航位推算导航
航迹推算法是在知道当前时刻位置信息的情况下,根据测量得到的载体移动的距离和方位,推算下一时刻载体的位置信息。目前在水下机器人中最常用的是DVL。DVL 依据多普勒效应,通过测量发射波和反射波之间的频率变化来获得航行器的运行速度。DVL通过声波反射可以获得较为准确的速度信息,可以对捷联式惯性导航(strapdown inertial navigation system,SINS)输出的速度信息进行修正,使得惯导系统在速度上的积分更为准确,减小定位误差。DVL 搭配纯惯性导航使用可提高惯导系统长时间工作的定位精度[12]。目前DVL有较为成熟的产品,如Nortek AS公司生产的 NORTEK-DVL1000 以及Teledyne 公司生产的WHN 1200 等DVL,可以实现航行距离千分之二的定位精度。大量文献[12-14]研究了SINS 与DVL 的组合导航模式,在初始对准、误差校正等方面都有较为成熟的方法。
同时,DVL 由于不需水面设备辅助,自身体积也较小,因此可以和纯惯性导航设备组合形成一体化的惯性导航装置,解决了传感器之间的同步性问题以及坐标轴融合等问题,使用较为方便。但是,由于DVL的工作深度有限,一般成熟的DVL 产品在工作时,都要处于距海底1~200 m 的区间范围内,否则无法准确获得水下机器人相对海底的速度。在大部分深度情况下,搭载在水下机器人上的DVL 都只能测量水下机器人相对某一水层的速度。这种工作模式获得的速度信息不够准确。因此,SINS-DVL 的组合应用范围较为受限。
1.2 惯性-水声导航
惯性-水声导航通常是指SINS搭配基线系统进行导航。基线系统由水面的应答器与水下的信标组成,可以利用声波的反射推算载体与水面平台的相对位置,能够获得较为准确的位置信息,甚至依靠信标本身就能实现导航[15]。因此,利用声学定位方式,修正SINS的位置信息,保证其长期工作时的位置信息不发散,是较为可靠的导航方法。一般地,以应答器基阵的长度来划分,基线系统可分为长基线系统(long baseline,LBL)、短基线系统(short baseline,SBL)和USBL[14]。LBL 长度超过100 m,SBL 长度在20~50 m 之间,而USBL 长度则小于10 m。水下机器人本体尺寸通常也在10 m 以内,故常搭配USBL,以便于安装。目前USBL 技术也较为成熟,如,挪威Kongsberg 公司开发的HiPAP500 型远程水声定位导航系统的实际定位精度可达作业距离的0.15%。PSOIDONIA6000超短基线水声定位系统由法国iXblue 公司研发,已经广泛应用于潜艇导航。除单信标外,有时也可采用多信标组合来提升定位精度[16]。
总体来说,SINS-USBL 的组合导航方式稳定可靠,能长时间运行,且由于信标体积较小,在水下机器人上的安装也较为容易。USBL 的工作方式不受水深环境影响,泛用性高;但是,USBL 还需考虑水面设备的安装布放,尤其是多信标系统中相关设备的布置和回收工作量大,耗资也相对较高;且如何实现时间同步也是SINS-USBL组合方式需要考虑的问题。
1.3 惯性-多传感器组合导航
为了进一步提高惯性导航的精度和鲁棒性,有研究探寻了多种传感器组合,即通过传感器信息之间的互补来提高惯导系统的定位精度。如上海中车艾森迪海洋装备有限公司采用SINS-DVL 一体化惯导,结合超短基线定位系统,实现了长时间、高精度的水下导航。文献[17]使用两个SINS 组成双惯性导航系统,通过构建双惯导系统的状态空间模型,计算载体的位置信息。文献[18]设计了一种基于DVL和声学定位辅助惯导的组合导航系统,其声学定位系统由安装在水下潜水器上的换能器阵和布放在海底的三阵元定位基阵组成。该组合导航系统根据三阵元测得的距离信息和惯导系统输出的位置信息建立距离耦合模型,解出载体位置信息。文献[19]将视觉传感器、GPS 传感器、水温水压传感器等多传感器的信息组合起来,实现了对惯导信息的修正。
这些传感器组合往往能带来更高的定位精度以及环境适应性;但是系统复杂、布放困难、成本较高,且时间同步较为困难,故不常见于工业应用。
除了上述SINS-DVL 组合方式外,也有研究结合水下机器人使用的其他传感器作为辅助,为水下机器人的定位提供参考。如使用深度计为纯惯性导航系统的深度信息提供修正;或者使用重力仪测算海洋重力,使用载体在经过目标区域时实时测量的重力数据和预先测量得到的基准数据进行比较,得到载体的位置信息[20]。文献[3]基于侧扫声呐的成像原理,结合侧扫声呐图像的成像特点,从其中提取出自主水下机器人(autonomous underwater vehicle, AUV)的载体坐标系下的侧向速度,并将其应用在检测和剔除DVL粗差数据上。该类方法布放方便,但精度相较上述惯导组合的更低。
1.4 视觉-惯性导航
上述1.1~1.3 节中的惯导系统都是基于惯性测量元件获取的参数,由其积分得出水下机器人的位置信息。然而,还有一类惯导系统则是基于视觉传感器获得的信息,通过状态估计的方式得出机器人的位置信息,惯性测量元件给出的位置及速度信息仅作为参考。这类导航方式被称为视觉-惯性导航。目前,视觉-惯性导航技术主要应用于水上的场景,在水下机器人上的应用研究仍处于起步阶段。如何将水上成熟的应用迁移到水下环境,是视觉-惯导技术应用于水下机器人的一大难点。
文献[4]使用双目视觉里程计与SINS 组合导航,以视觉的位姿信息作为观测量,并结合惯导的误差模型建立卡尔曼滤波(Kalman filter, KF)模型;同时,考虑时间同步,建立了高精度的惯导体系。文献[21]通过在水下机器人上搭载具有前端改进和点线融合特性的同时定位与地图重构(simultaneous localization and mapping,SLAM)系统,提高了视觉SLAM在水下环境使用的定位精度和地图构建效果。以色列海法大学构建了水下视觉-惯导的数据集,供从事水下视觉-惯导的研究者使用[22]。此类系统成本低、体积小,但涉及深度学习算法,对算力要求较高,且所使用的水下相机会受到水下能见度的影响。
2 误差修正算法
除纯惯性导航技术以外,其余各类惯导组合想要达到目标功能,都需要解决一个关键问题,即如何合理利用各传感器的数据,得到准确的位置信息。因此,误差修正算法也是决定水下机器人惯性导航系统定位精度的一个关键。本文关注了传统及新兴的误差修正算法,为水下机器人惯导系统的研究提供参考。
2.1 滤波算法
早期融合各传感器的数据、实现误差修正的方式主要是加权法和统计法。这些方法简单实用,但修正后的水下机器人位置信息仍存在较大误差。目前在数据修正方面最为常见的方法为滤波,即将辅助位置信息作为阈值,对惯导的位置信息进行修正。
将滤波算法应用于数据融合的思路最早由Jalving B[23]提出,他利用卡尔曼滤波进行USBL 和SINS组合的数据融合和滤波处理。国内也有学者提出基于KF 的SINS-USBL 水下组合导航算法,并进行了系统模型的研究和误差分析[24]。针对KF算法,国内外学者研究了许多改进方法,其中最有代表性的是松组合和紧组合两种不同的组合算法,其主要利用扩展卡尔曼滤波(extended Kalman filter, EKF)对惯性误差进行了估测与补偿[5-6]。哈尔滨工程大学的白金磊对INSUSBL 组合算法进行了一个较为全面的总结,对比了松组合和紧组合算法的优缺点,并提出一种紧组合算法,有效减小了估计误差[7]。此外,北京自动化控制设备研究所的张亚文等提出了基于集中滤波的SINSDVL-USBL 水下组合导航方法,建立了基于SINSUSBL 相对量测信息的观测模型[8]。文献[9]提出了SINS-DVL-USBL 组合的分布式联邦滤波,以SINSUSBL 组合作为主滤波器,结合SINS-DVL 子滤波器,实现了三者数据的融合。西北工业大学的高兵兵采用联邦滤波技术设计SINS-DVL-USBL组合导航系统方案[10]。东南大学张涛等人也于2017年提出了一种基于斜距与斜距差的组合模型[11]。东南大学的翁铖铖采用基于位置匹配的松组合方式以及基于方位角和斜距的紧组合方式,设计了SINS-USBL 组合导航,并利用深度计结果来约束系统的高度信息[5]。
视觉-惯性导航也主要通过滤波的方式进行位置误差修正,如基于误差状态卡尔曼滤波(error-state Kalman filter,ESKF) 的视觉-惯性紧耦合框架、MSCKF 2.0、Open-VINS 、MSCKF-VIO 等算法。同时优化方法也是视觉-惯性导航独有的数据修正方法。该方法一般都是基于最大后验估计,将状态估计问题转化成非线性最小二乘的优化问题,然后用高斯-牛顿法或列文伯格-马夸尔特算法等进行优化求解,例如OKVIS、VINS-mono、ORB-SLAM3等算法[25]。
2.2 人工智能算法
人工智能算法拥有极强的数据拟合能力,在权重寻优的问题上有较为突出的表现。因此,也有研究将人工智能算法应用于水下机器人的导航系统中。
人工智能算法的应用主要可分为局部优化和整体组合应用两个方面。局部优化是针对惯导系统中的某一特定传感器所采集到的数据进行优化,提高该数据的精度,从而提高整个惯导的精度。文献[26]利用循环神经网络(recurrent neural network, RNN),通过SINS、DVL以及深度计的数据信息,预测水下机器人相对海底的速度,从而得到机器人的位置信息。文献[27]利用深度神经网络BeamNet对DVL得到的信息进行修正,使惯导系统工作过程中DVL 的数据准确率上升了60%。文献[28]利用深度神经网络的预测功能及深度计等其他传感器数据,对机器人自身的航向速度进行预测,取代了DVL 的功能,使得机器人能够在无法使用DVL的区域照常工作。文献[29]提出一种基于深度神经网络的UBSL定位方法,USBL采集的相对位置数据作为神经网络的输入,经过处理,输出是绝对位置信息和方向信息。这个方法过滤了USBL的定位误差,提高了导航精度。
而整体组合应用则是通过收集所有传感器的数据,来直接得出位置信息,实现高精度导航。文献[30]提出了一种多模型的导航系统,使用一个AHRS、DVL和NavNet 相结合的子模型来修正未知误差,同时使用调整的 AHRS-DVL子模型过滤时间累积误差,从而提升惯导的准确率。文献[31]使用时间卷积神经网络(temporal convolutional network , TCN)对多传感器的数据进行卷积以提取特征,同时引入注意力机制,对机器人的位置信息进行估计,结果相较于EKF 的有了56%的提升。文献[32]使用语义模型和状态估计模型相结合,通过语义模型对自主水下机器人的位置信息进行预测,再通过状态估计模型来验证所得位置信息,相比KF模型有更加强的抗干扰能力。文献[33]通过强化学习的方式,利用USBL和姿态传感器提供的数据,推算机器人的位置信息。文献[34]提出只用模糊逻辑航向控制模型,使用机器人的声呐和视觉传感器收集的数据,结合深度神经网络来得出机器人当前的位置信息。文献[35]首先建立了针对超短基线声学定位系统预测的机器学习模型,通过USBL 声学定位系统的观测数据集来训练该模型,并用得到的模型来预测更新间隔内的数据,最后使用UKF将已更新的数据集进行融合。相比传统的组合导航算法,异步融合组合导航算法将USBL声学定位系统数据异步问题所引起的惯导误差降低了17%[35]。
3 水下机器人惯导技术发展趋势分析
结合上述分析可知,水下机器人目前仍是以纯惯性导航为主,并辅以其他传感器进行定位。但是目前的水下机器人惯性导航系统还存在着诸多问题,如如何对准、航向发散等。随着研究的不断深入和技术的发展,未来的水下机器人惯导技术将会向高精度、系统化、智能化的方向发展,再结合智能误差修正算法,可以形成高精度、长时间稳定运行的水下惯导系统。
3.1 高精度化
目前水下机器人惯导系统中的惯性单元主要以光纤陀螺为主,在精准度方面还有较大提升空间。激光陀螺拥有比光纤陀螺更高的精度和更微小的精度发散。文献[36]研究了激光陀螺的误差修正方法,结果表明,激光陀螺仪敏感轴动态偏移参数估计精度优于 0.2 "/g。
此外,根据量子力学原理发明的原子陀螺在精度和稳定性上又有了进一步的提升。原子干涉陀螺理论误差可达到 10-13° / h 以内, 可大幅消除累计误差带来的影响, 为目前最具潜力的惯性导航系统[37]。提升惯性测量元件的功能,是未来水下机器人惯性导航技术发展的一个确定的方向,其未来的研究将围绕高精度测量元件的小型化和低成本展开,促使其实现成熟的工业应用。
3.2 多源融合
由于各传感器的使用条件不一,适用环境会受到限制,未来水下机器人的惯导系统将会整合更多传感器,如DVL、USBL、多波束声呐、深度计等,为惯导误差修正提供更多信息。同时,为避免多传感器整合带来的安装误差以及时间同步问题,将多种仪器与惯性导航元件整合为一体化的惯导系统也是未来惯导技术发展的趋势之一。然而,多源信息如何进行时间同步,以及如何利用这些信息获得更为准确的数据成了未来研究的重点。Sonardyne 公司研制的 SPRINT 惯性导航系统把SINS、DVL 以及深度计等传感器的信息整合,形成一体化惯导系统,提高了定位精度,同时解决了时间同步问题[37]。
此外,视觉-惯性导航和SLAM导航技术也将摄像头等光学传感器引入了导航系统中;地图重构技术将更多的传感器通过算法融合到水下机器人的惯导系统中,使得惯导技术的选择更加多样化。如何尽可能地应用水下机器人自身携带的传感器,以及如何改进多源信息的融合,将会成为未来研究的重点。
3.3 智能化
随着人工智能技术的不断发展,大量人工智能技术被应用于惯性导航领域,使得水下机器人惯导系统也朝着智能化的方向发展[26-34]。人工智能算法在数据处理方面较为出色,具有更强的灵活性和鲁棒性,在多源数据融合以及视觉图像处理和地图生成等方面均有很大的应用空间。人工智能算法的应用将大大提高水下机器人惯导系统的效率。然而智能算法的应用也将带来许多问题,诸如:需要大量数据训练,所以初始化时间长;鲁棒性不足,在某一区域样本训练下的机器,在差异较大的环境下无法取得理想的效果;所依赖的传感器精度有限,会造成所生成路径存在误差。因此,未来水下机器人惯导系统智能化的研究将着重于样本生成、鲁棒性提升以及误差消除等方面。
4 结束语
目前,水下机器人的惯导系统主要以捷联式惯性导航SINS 为主,并辅以其他测速或定位手段,包括航程计算、声学导航、视觉传感器以及多传感器组合等。本文将这些惯性导航系统进行了一一说明,并从水下机器人的工作环境、布放方式、系统协同等角度,分析了各种惯导组合系统的优势与缺点。同时,本文针对所有惯导系统的共同问题——位置误差修正,研究了相应的修正算法。滤波算法是目前惯性导航组合中主要的误差修正算法,但其准确度极大程度上依赖传感器的精度;同时,人工智能算法也逐渐被应用到水下惯导系统中,但要实现成熟的工业应用,还需突破训练样本获取以及鲁棒性不足的难题。未来,小型化、一体化必然会成为水下机器人惯导系统的发展趋势;同时,水下机器人导航系统研究的关键会集中在算法上,人工智能算法将逐步应用于水下机器人惯导系统中。
猜你喜欢
Journal of Palaeogeography(2022年1期)2022-03-25
快乐语文(2021年35期)2022-01-18
军民两用技术与产品(2021年7期)2021-10-13
湖北农机化(2020年4期)2020-07-24
法律方法(2019年4期)2019-11-16
测控技术(2018年2期)2018-12-09
北京航空航天大学学报(2018年1期)2018-04-20
摄影之友(影像视觉)(2017年1期)2017-07-18
中国惯性技术学报(2017年1期)2017-06-09
中国惯性技术学报(2015年1期)2015-12-19