高速牵引车辅助驾驶节油算法研究
2024-01-10 10:11符兴胜纪嘉伟赵晓嵩
柴油机设计与制造 2023年4期
符兴胜, 纪嘉伟, 赵晓嵩
(上海新动力汽车科技股份有限公司,上海 200438)
0 前言
公开数据显示,2020 年我国车用燃油消耗2.27亿t,占汽柴油消耗总量的85%[1],随着我国汽车保有量的不断增长,预计汽车燃料消耗量在我国石油消耗量中所占比例还会继续提高,由此带来的能源紧张问题将更加突出。重型商用车保有量虽然仅占汽车总量的15%左右,但作为生产资料,其具有单车能耗高、使用强度大、行驶里程长等特点,是目前我国道路交通中柴油消耗的主力军,贡献了超过50%的能耗和碳排放量[2]。随着能源问题的日益尖锐,重型商用车的燃油耗问题成为社会和企业重点专注的对象。
目前,市场上大部分重型商用车配备有定速巡航系统,该系统可使车辆按照驾驶员设定的车速运行,减轻驾驶员疲劳,避免不必要的车速变化,在一定程度上提升了车辆的经济性。但是,实际道路的坡度起伏变化,在上坡时定速巡航控制策略会增加发动机负荷率,使燃油耗大幅上升,而下坡时无法利用车辆惯性,将带来不必要的能量损失。我国地形以山地、丘陵居多,全国地理国情普查数据显示,山地、丘陵和台地占据我国国土面积的73.38%[3],由于道路的坡度变化较大,标配的定速巡航系统必然会导致整车经济性下降。
目前,斯堪尼亚、奔驰、沃尔沃、曼等重型卡车制造商均积极开展了预见性巡航控制(PCC)系统方面的研究工作[3]。
斯堪尼亚的主动预测巡航控制系统可通过使用道路网的地形图数据来弥补普通定速巡航系统的不足,该系统已完全覆盖欧洲西部和中部地区。配备该系统的车辆在公路和高速上行驶时可节省3%的燃油。
奔驰的PCC系统将当前关于卡车精确定位的全球定位系统(GPS)信息与存储的数字3D路线地图进行链接,通过计算得出电子视野模型,进而使卡车自动适应此模型。PCC系统实时计算出道路的方向和地形,以便提前规划换档时机,并通过巡航控制预见性地调整车辆速度。同时,该系统不断使用来自动态控制辅助系统的信息,将前方车辆的驾驶行为纳入到动力链总成的燃油优化控制中。配备该系统的车辆在公路和高速上的燃油耗最多可降低3%,在乡村越野道路上,燃油耗可减少5%[4]。
沃尔沃基于所提出的山路驾驶“6步法”推出ISee自动巡航系统。如图1所示。I-See自动巡航系统通过变速箱内的角度传感器获得周围的地势信息,系统内储存有4 000个斜坡信息,相当于5 000 km的路面信息。除了路面的坡度信息,I-See自动巡航系统还可获得空气阻力、车辆载重等多方面信息。经各种实际道路的模拟测试可得出,采用该系统平均可以减少5%的燃油耗。

图1 I-See自动巡航系统的山路驾驶“6步法”
本文以某款长途高效牵引车为研究对象,采集并分析优秀驾驶员的驾驶习惯,设计基于实时道路坡度信息的PCC策略,使用AVL-Cruise软件和Matlab/Simulink软件进行联合仿真,给出仿真和实车的测试结果,分析预见性巡航和定速巡航的整车燃油耗变化量和发动机运行工况。
1 驾驶行为分析
选取该长途高效牵引车车队燃油耗表现优秀的车辆,使用整车数据采集工具采集该车辆的运行数据。对该车驾驶员的驾驶行为进行分析,提取其对车速和加速度的控制数据,如图2 和图3 所示。由图2 和图3 可以看出:该车辆运行车速集中在60~90 km/h,加速度集中在-0.2~0.2 m/s2。
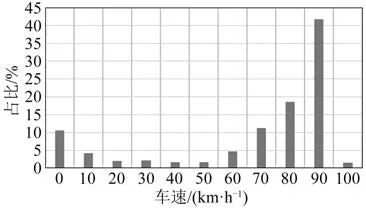
图2 长途高效牵引车的车速分布
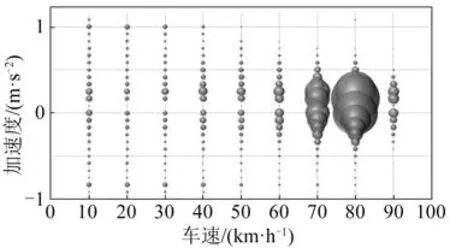
图3 长途高效牵引车的加速度分布
驾驶员对车速和加速度的控制反映在发动机扭矩脉谱图中,如图4所示。由图4可以看出:转速集中在1 000~1 200 r/min,负荷率中等偏低,发动机整体功率需求较低。
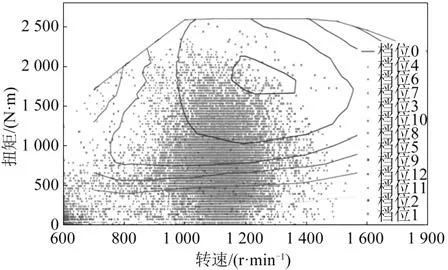
图4 发动机扭矩脉谱图
2 PCC策略设计
根据对车辆实际运行数据的分析结果,将PCC策略分为平路、下坡、上坡3部分,如图5所示。策略模型会预设一段探测距离:当前方探测距离内无坡道时,按平路策略进行控制;当前方出现坡道时,判断坡度并进行下坡或上坡的策略控制。
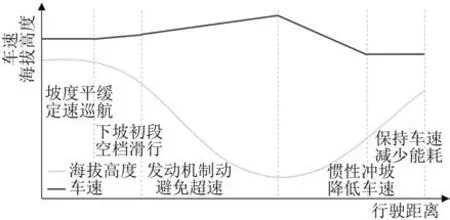
图5 PCC策略
根据汽车动力学,在汽车行驶过程中发动机需求扭矩需满足下式:
式中:Tn为发动机需求扭矩;ig为主减速比;i0为变速器的速比;ηT为动力系统传动效率;r为车轮滚动半径;m为汽车总质量;g为重力加速度;a为道路坡度;f为滚动阻力;CD为风阻系数;A为汽车迎风面积;V为当前车速;δ为汽车旋转质量换算系数;t为时间。
策略模型可根据路谱反馈的坡度信息和整车加速度的变化实时计算发动机扭矩需求,并将其反馈给发动机模型。
2.1 平路控制策略
车辆在平路上自由行驶,考虑行驶舒适性和燃油经济性,匀速行驶是一个合理策略[5],但实际道路会存在微小坡度,因此将坡度为-0.5%~0.5%的道路均定义为平路。车辆在平路上行驶时采用定速巡航策略,如图6所示。策略模型根据坡度、加速度变化引起的功率需求变化实时修正。
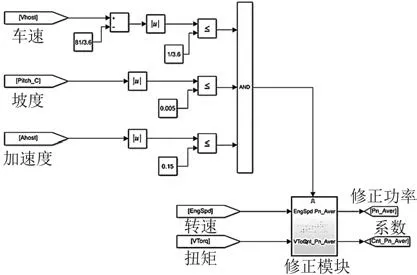
图6 平路控制策略模型
2.2 下坡控制策略
为最大化地利用整车重力势能和动能,在下坡初始阶段整车进行空档滑行,当车速达到设定阈值时,将整车切换至带档滑行,利用发动机制动或使用机械制动以避免超速,下坡控制策略模型如图7所示。
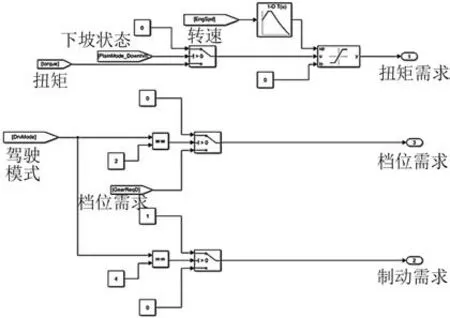
图7 下坡控制策略模型
2.3 上坡控制策略
上坡控制策略与定速巡航类似,其在定速巡航的基础上增加了道路坡度判断,在不需要降档的前提下,根据不同的道路坡度设定分段的巡航车速。
3 整车仿真模型
3.1 整车模型
利用AVL-Cruise软件对该款长途高效牵引车进行建模,如图8 所示。由图8 可看出通过Matlab dll模块引入Simulink搭建的PCC策略。
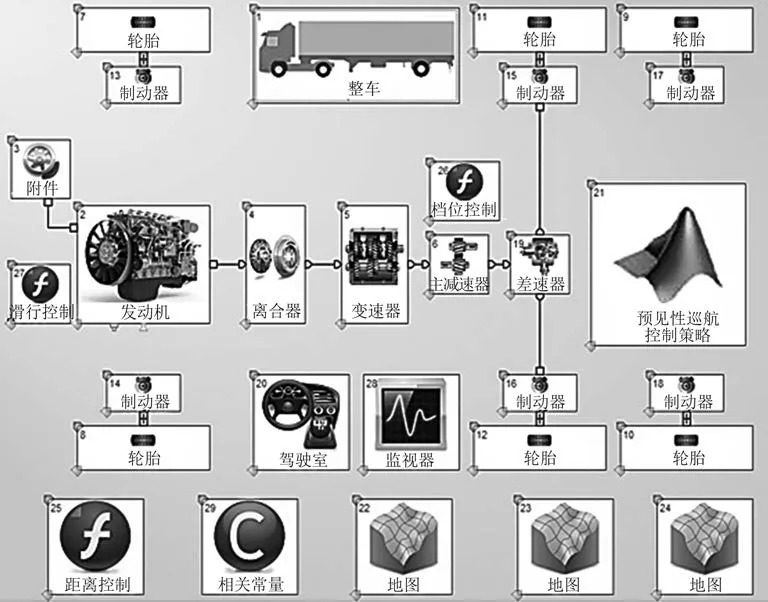
图8 牵引车整车模型
3.2 运行工况
为准确地在PCC策略模型中输入坡度信息,对汽车行驶工况进行采集统计,形成的里程与坡度的二维分布如图9所示。
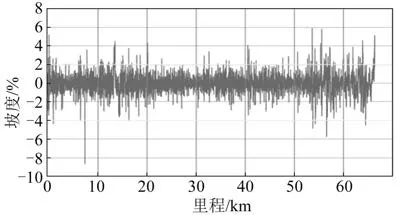
图9 里程与坡度的二维分布
4 仿真与实测结果分析
4.1 仿真分析
仿真行驶里程为712.3 km,PCC策略与定速巡航策略的仿真结果对比见表1。由表1可知,相较于定速巡航,在PCC策略下燃油耗下降11.57%,所耗时间仅增加27 min。
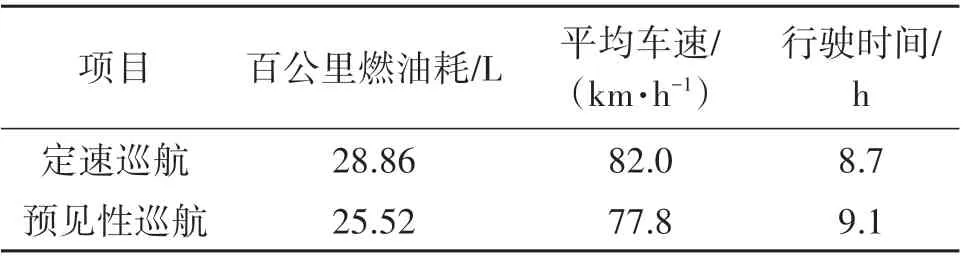
表1 PCC策略与定速巡航的仿真结果对比
采用PCC策略后,发动机负荷率明显降低,发动机整体功耗减小。爬坡车速降低避免了降档增速,充分利用了大排量柴油机低转扭矩大的特性,而定速巡航在上坡时为保持预设的车速,需要降档来提升转速,在PCC策略和定速巡航策略下发动机运行工况分别如图10和图11所示,其中发动机工况点内数值代表在该工况点运行的占比。
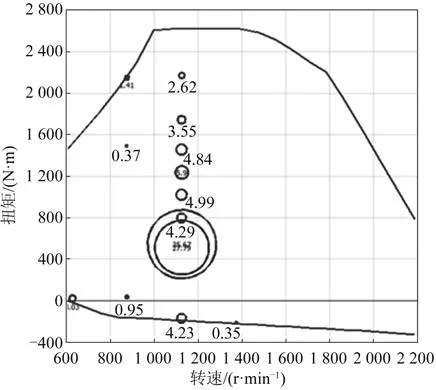
图10 PCC策略下发动机的运行工况
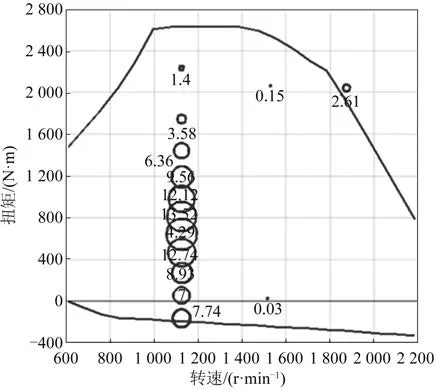
图11 定速巡航策略下发动机的运行工况
采用PCC 策略后,整车车速随坡度发生变化,下坡时车速增加,这为平路行驶或冲坡积累了动能,上坡时车速降低,以节省能量,其中某一段里程的车速和道路海拔高度变化如图12所示。
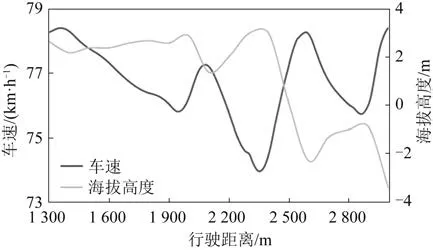
图12 仿真车速与海拔高度的关系
4.2 实车测试
在同配置牵引车上配置PCC系统,选取上海周边一段长为44 km的高速作为测试路段,如图13所示。该路段的坡道信息可通过车辆信息采集工具获得,并载入测试车辆的巡航系统中。

图13 实车测试线路
实车在PCC策略与定速巡航策略下的百公里燃油耗对比见表2。采用PCC 策略后,燃油耗降低6.8%,所耗时间仅增加1.4 min。
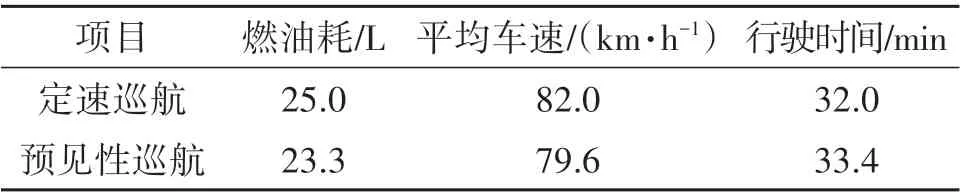
表2 在PCC策略与定速巡航策略下的百公里燃油耗对比
测试车辆的车速随海拔高度的变化如图14 所示。由图14可以看出:海拔高度上升即上坡时车速下降,海拔高度降低即下坡时车速升高,海拔高度平缓即平路时整车维持相对稳定的车速,其中车速急剧减小是由于前方有低速车辆,人为干预制动避让。
5 结论
通过对优秀驾驶员驾驶行为的研究分析,设计出高速牵引车PCC策略,并进行模型仿真和实车测试,得出如下结论:
(1)根据优秀驾驶员驾驶行为设计的预见性巡航策略在Cruise软件中对车速的控制与预期相符。
(2)使用带坡度信息的实际路谱来对比PCC策略和定速巡航策略的燃油耗,在时效性相近的情况下,PCC策略可节油11.57%。
(3)在上海周边高速上进行实车测试,与定速巡航相比,长途高速牵引车在PCC 策略下可节油6.8%。
猜你喜欢
装备制造技术(2020年3期)2020-12-25
石家庄职业技术学院学报(2018年6期)2019-01-18
环球市场(2018年19期)2018-09-10
汽车维护与修理(2018年1期)2018-04-04
汽车维修技师(2017年8期)2018-01-08
中国设备工程(2017年23期)2017-01-20
汽车实用技术(2015年8期)2015-12-26
汽车维修与保养(2015年7期)2015-04-17
汽车维护与修理(2015年5期)2015-02-28
警察技术(2015年6期)2015-02-27