
基于语音识别处理的植保无人机航行路径控制研究
2024-01-11 07:54程永红
农机化研究 2024年2期
程永红,王 萌
(1.河北工业职业技术大学,石家庄 050091;2.河北公安警察职业学院,石家庄 050091)
0 引言
植保无人机指用于农林作业的无人机,可以通过地面遥控或内置驱动程序实现作物田间巡视、施肥、施药和播种等作业。本文研究的基于语音识别处理的植保无人机航行路径控制系统,可以实现对植保无人机的语音控制和动态避障的航行路径规划。
1 语音识别处理
1.1 识别算法数学模型
语音识别算法的数学模型由声道、辐射和激励3个模型组成,如图1所示。

图1 语音识别算法数学模型结构图Fig.1 The structure diagram of mathematical model of speech recognition algorithm
其中,声道模型V(z)根据发某个音时获取声道不同的谐振频率,形成共振峰,作为声道传输函数模型;辐射模型R(z)采用高通滤波器对语音信号进行处理,R(z)表示辐射阻抗;激励模型G(z)表示声门脉冲信号;A表示模型调节系数值,用来调整函数能量幅值。语音识别算法模型的核心是确定语音信号进行转换所需的输出函数H(z),其表达式为
H(z)=A·G(z)V(z)R(z)
(1)
1.2 识别算法预处理流程
将发音的模拟信号通过AD采样为数字信号,再对基于倍频衰减信号进行离散化预处理,从而使语音数字信号的高频信号突出,方便分辨和进行分析。一阶数字信号滤波器进行离散化处理方程式为
H(z)=1-uz-1
(2)
其中,u∈[0,1]为离散系数。
设x(n)为某一个时间点n对应的值,经过预处理后可得
y(n)=x(n)-kx(n-1)
(3)
其中,k为高频信号取值系数比值,一般取常数0.9。
1.3 语音信号特征提取
语音识别精度与算法提取语音特征的准确度有关。在此,采用MFCC对语音信号进行提取,其过程如图2所示。

图2 语音信号特征提取过程Fig.2 The feature extraction process of speech signal
1.4 HMM语音识别算法
采用HMM(隐马尔可夫模型)算法进行语音的识别处理,该算法第1步是创建语音词汇表。设该表格共有N个词汇,模型系数λn和N个词汇一一对应,则
λn=(An,Bv,πv)
(4)
在进行语音识别的过程中,首先提取监测矢量O={o1,o2,…,oT};然后求出模型系数λn的分配概率P(O|λ);最后在其中筛选出概率最大的词汇n*,也就是该词汇识别的结果,即
(5)
实现语音的识别后,便可以进行植保无人机的指令识别,其主要步骤如下:①每条指令采集100次,并对其进行预处理和特征参数提取;②利用提取出来的特征参数对每条植保无人机指令训练出一个HMM模型;③在识别过程中,对获取的指令进行预处理和特征提取,再计算每个识别模型的匹配概率。其中,概率最大的模型对应的无人机语音指令就是识别结果。
2 植保无人机的结构与工作原理
本文研究的植保无人机采用旋翼式设计,整体结构主要由机身和4个旋翼组成,主要靠旋翼旋转产生的动力驱动无人机朝X、Y和Z三轴进行平移或者旋转运动。旋翼旋转中会产生反向扭矩力,会对植保无人机控制产生不利影响。为了防止这种反向的扭矩力的不利影响,需要将4个旋翼安装在同一个平面,然后对角的两个分为1组,在飞行过程中采用相同的旋转方向。植保无人机整体结构如图3所示。

图3 植保无人机整体结构Fig.3 The overall structure of plant protection UAV
图3中,植保无人机采用“十字”型结构,旋翼1和旋翼3这组采用顺时针方向旋转,另外一组则采用相反的方向旋转。植保无人机工作原理和传统的飞行器有较大差别,其旋翼是固定的,位置和姿态只能依靠转速变化进行控制。
植保无人机的基本运动方式包括垂直、俯仰、滚转和偏航4种,介绍如下:
1)垂直运动。植保无人机依据旋翼带来的升力和无人机自重的关系,便可以实现其垂直上下运动:①当植保无人机总升力大于其自重时,会垂直上升;②当植保无人机总升力等于其自重时,会悬停在空中;③当植保无人机总升力小于其自重时,会垂直下降。
2)俯仰运动。植保无人机的俯仰运动往往需要搭配着前后运动。提高旋翼2的转速和降低旋翼4的转速,或者反过来,提高旋翼4的转速和降低旋翼2的转速,同时保持旋翼1和旋翼3的转速,那么旋翼4和旋翼2就会出现压力差,从而总升力会产生一个前后的分量;而若此时植保无人机总升力等于其自重,那么植保无人机就会进行前后运动。
3)滚转运动。植保无人机的滚转运动和俯仰运动类似,提高旋翼1的转速和降低旋翼3的转速,或者反向操作,同时保持旋翼2和旋翼4的转速,那么旋翼1和旋翼3就会出现向左或者向右的压力差;若此时植保无人机总升力等于其自重,那么植保无人机就会进行滚转运动。
4)偏航运动。植保无人机的偏航运动不需要依靠4个旋翼的压力差,而是靠旋翼的反扭矩力。在植保无人机悬停时,控制对角的两个旋翼同时提高或者降低转速,保证1组对角旋翼提高转速、1组对角降低转速;而植保无人机总升力等于其自重时,会出现反扭矩力,植保无人机就会在原来的位置上进行顺或逆时针的偏航运动。
3 人工势场法
利用人工势场法对植保无人机的航行路径与控制进行分析,算法的基本思路是建立一个人工势场。植保无人机、目标地点和障碍物都是其中的带电粒子;植保无人机和障碍物带负电荷,目标地带正电荷,根据同性排斥和异性吸引的原理,势函数的下降方向就是最优的路径。人工势场法工作原理示意如图4所示。

图4 人工势场法工作原理示意图Fig.4 The schematic diagram of working principle of artificial potential field method
传统人工势场的引力计算为
Uat(P)=ξ‖Pgoal-P‖m
(6)


图5 人工势场法的引力场模型图Fig.5 The gravitational field model diagram of artificial potential field method
由图5可以看出,人工势场法的负梯度为

(7)
该负梯度的值会随着植保无人机和终点距离的减小而逐渐至0。植保无人机的航行路径规划,终点并不是一直单一静止的,由于飞行过程中会经常出现障碍物,故需要动态的对飞行路径进行规划。人工势场引力示意如图6所示。

图6 人工势场引力示意图Fig.6 The schematic diagram of artificial potential field gravity
图6中,若终点附近有障碍物时,随着植保无人机的飞近,也会受到障碍物的斥力,导致终点附近的总势能不是最小。因此,对传统人工势场进行一定改进,定义为
Uat(P,V)=ξp‖Pgoal(t)-P(t)‖m+
lv‖Vtar(t)-V(t)‖n
(8)
其中,Vtar(t)和V(t)分别表示终点和植保无人机在t时刻的移动速度;ξp、lv表示正参数;m和n表示势场系数。那么,改进后的引力势场负梯度表达式为
Fat(p,v)=-∇Uat(p,v)
=-∇pUat(p,v)-∇vUat(p,v)
(9)

(10)

(11)
联立式(8)和式(9)可得
Fat(p,v)=Fat1(p)+Fat2(v)
(12)
Fat1(p)=kξp‖Ptar(t)-p(t)‖mNprt
(13)
Fat2(v)=flv‖Vtar(t)-V(t)‖nNvrt
(14)
其中,Nprt为植保无人机指向终点的单位矢量;Nvrt为植保无人机与终点相对速度的单位矢量。
4 基于人工势场法的植保无人机航行路径控制算法研究
人工势场法是将植保无人机作业区域进行一种抽象的描述,目的是使植保无人机在作业过程中避开障碍物,顺利飞到终点。基于改进人工势场法的植保无人机航行路径控制算法程序如图7所示。

图7 采摘机器人动态路径规划程序框图Fig.7 The dynamic path planning program block diagram of picking robot
图7中,首先植保无人机会进行算法初始化设置,再根据算法计算植保无人机当前受到的势场合力;然后,确定当前的航向角、速度及探测周边是否有障碍物,并计算出引入障碍物斥力后的合力,对植保无人机的航向和速度进行调节;最后,计算植保无人机下一时刻的位置,判断其是否已经到达目标位置或达到最大迭代次数,若是则完成当前任务,否则继续进行前面的流程,直至达到目标位置或者到达最大迭代次数。
5 仿真研究
为了验证基于语音识别处理的植保无人机航行路径控制算法的可靠性,在同一天的3个时间段进行实际的植保无人机巡视作业。试验中,采用语音控制设置植保无人机运动模式,测试数据如表1所示。表1中,“Zero”表示垂直向上飞,“One”表示垂直向上降,“Two”表示向左翻转,“Three”表示向右翻转,“Four”表示空中悬停,“Five”表示从当前位置飞到设定的终点。
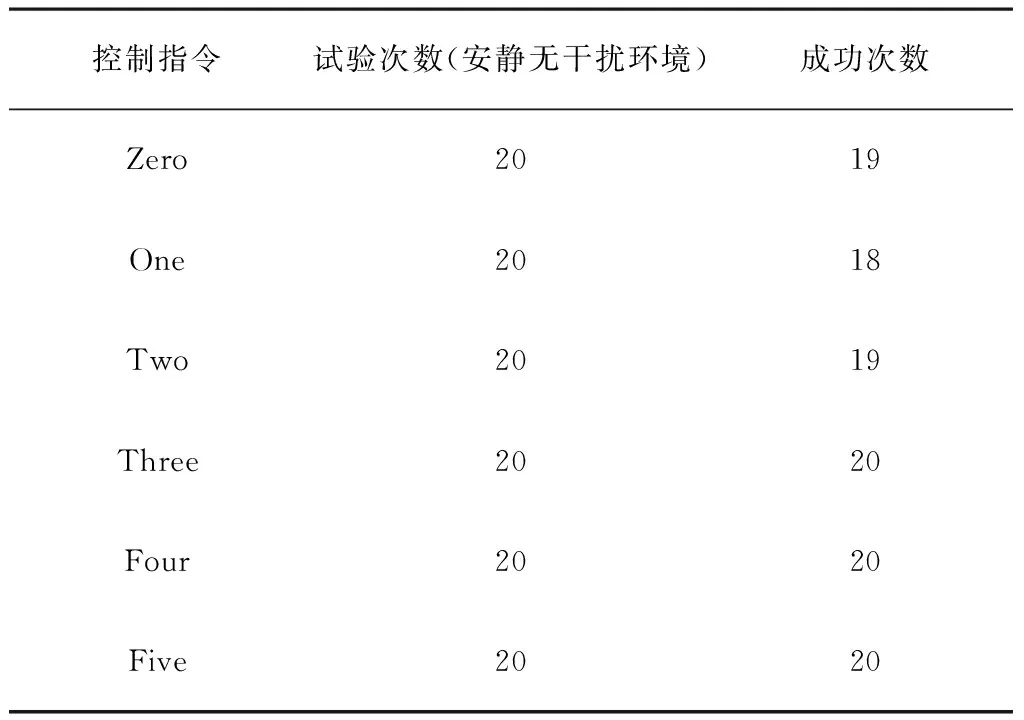
表1 测试结果Table 1 The test results
由表1可以看出:语音控制控制准确度非常高,达到了90%及以上,证明了植保无人机语音控制系统的可靠性。
另外,为了验证植保无人机航行路径控制算法,还对植保无人机从当前位置飞到设定的终点的路径进行分析。植保无人机避障航迹轨迹如图8所示。

图8 植保无人机避障航迹轨迹图Fig.8 The trajectory diagram of obstacle avoidance track of plant protection UAV
由图8可以看出:基于改进后的人工势场算法,障碍物斥力会随着植保无人机靠近终点而减弱,终点产生的引力遍及全部地图,而障碍物的斥力影响只作用在其影响范围内。试验证明:基于改进人工势场算法的植保无人机航行路径控制准确,能够成功避开障碍物,并动态规划最优飞行路径。
6 结论
基于语音识别处理和改进人工势场算法,对植保无人机的飞行控制和航行轨迹规划进行分析研究,可以实现通过语音传达植保无人机的操控指令以及植保无人机的动态避障和航行路径规划。试验结果表明:①语音控制控制准确度非常高,达到了90%及以上;②植保无人机航行路径控制准确,能够成功避开障碍物,并动态规划最优飞行路径。
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24
北京航空航天大学学报(2021年9期)2021-11-02
高技术通讯(2021年5期)2021-07-16
军民两用技术与产品(2021年9期)2021-03-09
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
电子制作(2019年9期)2019-05-30
石油地球物理勘探(2017年4期)2017-12-18
北京航空航天大学学报(2016年8期)2016-11-16
系统工程与电子技术(2016年4期)2016-08-24
