
基于分布式系统的植保机智能与安全性能优化
2024-01-11 07:55郑思思
农机化研究 2024年2期
康 华,郑思思
(唐山科技职业技术学院,河北 唐山 063000)
0 引言
我国是农业大国,国家对于农业的投入逐年增加,大大加快了农业生产方式现代化的步伐,科技在农业装备中的作用也越来越大[1-3]。植保机是近年来发展起来的一种智能化和自动化的农业装备,其采用无人驾驶的方式进行灌溉、农药喷洒等工作,已经得到越来越多的关注。植保机具有飞行控制简单有效、对作业地形要求较低等优点,不仅提高了作业效率,而且避免了农药对操作者身体的伤害[4]。当前,一方面对于农业综合生产能力的要求不断提高,需要植保机可进行多功能的作业和自动切换;另一方面,植保机在作业时搭载的药箱较重,在飞行过程中无法保证其安全性能,还需要对植保机进行智能优化和安全性能的提升。
为此,研究人员将机器视觉、网络信息等技术应用于植保机的控制,在自动导航和视觉定位等方面已有了较大的发展;同时,可以从控制系统方面进行智能优化,即将通信和计算能力嵌入植保机内部,通过反馈和控制过程实现对植保机的控制。这种控制方式可以有效提升植保机的自适应能力和集成控制能力。对于安全性能方面,可以利用植保机的动力学模型对其结构进行分析和优化,从而提升其安全性能。随着植保机获取信息的增多,仍然存在对信息资源有效配置的问题。
目前,分布式系统是计算机信息处理的大趋势,通过采用多处理机系统结构进行任务的处理,以实现多任务执行,有效提升任务的响应速度以及任务执行速率。因此,本文将基于分布式系统对植保机的智能和安全性能进行优化。
1 硬件设计
1.1 总体设计
植保机按照功能可以分为4部分,分别为机体、喷洒系统、控制单元、地面监控站和供电系统,总体结构如图1所示。这4个部分根据自身功能不同,分工协作,共同完成植保机的任务。

图1 植保机总体设计结构简图Fig.1 The design structure diagram of plant protection machine
1.2 机体
植保机的机体部分是指飞机的机身骨架,作用为安装和固定植保机的其他各系统。考虑到植保机在作业过程中需要搭载药箱,且作业环境较为复杂,尤其在山区和丘陵地带无法提供跑道,采用飞行方式简洁、易于控制的单旋翼无人机作为植保机进行研究。一般植保机的机体主要由主旋翼系统、尾旋翼系统、发动机、传动装置和油箱组件等。
1.3 喷洒系统
喷洒系统通过利用飞控单元对获取的GPS和相关农田信息进行分析,同时改进传统的喷药方式,采用传感器来控制喷洒系统的元器件实现变量喷药。系统的主要组成包括药箱、电磁阀、药液泵、压力和流量传感器以及喷嘴等。改进后的变量喷洒系统如图2所示。

图2 变量喷洒系统设计简图Fig.2 The design diagram of variable spray system
作业前,飞控系统将GPS、农作物病虫害信息和数据分析处理结果传递至喷洒系统,喷洒系统根据这些信息计算农田各区域需要的喷药量。作业过程中,电磁阀用于控制喷嘴开合的频率,控制药量的喷洒;同时,药品回流管处设置电磁阀,控制药品输送压力;压力传感器和流量传感器实时监测管道内的压力和流量值,并实时反馈给ARM控制器进行总喷洒药量的调整。
1.4 飞控单元
飞控单元是植保机的控制单元,作用主要是为植保机的飞行和作业输出正确的指令,实现植保机的智能控制,包括GPS定位、导航、遥控作业和变量喷药等功能的控制。其主要组成包括ARM控制器、通信模块、数据存储模块、姿态检测模块和轨迹检测模块。
ARM控制器是整个飞控单元的核心控制部分,用于实现对整个植保机运动的控制。为了提升植保机和网络的耦合性,以及植保机的智能化程度,ARM控制器采用嵌入式系统[5],即以计算机技术作为基础,将软件和硬件综合在一起,以适应植保机的应用,同时还可涵盖机械等一些附属装置。ARM控制器的硬件结构如图3所示。

图3 ARM控制器硬件结构图Fig.3 The hardware structure diagram of ARM controller
通信模块主要用于飞控单元与地面监控站信息的传递,包括指令的接收传达、飞行和作业状态信息的传递,同时还对植保机的电量和动力进行实时监控。为了减少设备的布线,同时提高信息传输效率,采用无线传感网进行信息的传递。
数据存储模块用于实时存储植保机的相关信息,包括指令、飞行状态及作业状态等。
姿态检测模块主要采集植保机的飞行姿态信息,三轴加速度计用于测量飞行线速度,陀螺仪用于测量飞行角速度,电子罗盘用于测量飞行方向。因此,采用更便捷的、包含三轴加速度计和陀螺仪的MPU-6050惯组模块来作为姿态检测模块。惯组模块的原理如图4所示。

图4 惯组模块原理图Fig.4 The schematic diagram of inertial module
轨迹检测模块主要用于采集植保机的飞行航迹数据,主要组成包括气压计和GPS。
1.5 地面监控站
地面监控站主要用于对植保机进行远程的监控和操控,还可设置人机界面对植保机进行功能的切换、飞行参数和状态的实时显示。其主要组成包括数据传输系统、图像传输系统、显示屏和地面站。
1.6 供电系统
供电系统主要为植保机的正常运行提供电力支持,使其能够完成规定的指令和动作。系统主要包括动力电和飞控信号电,这两部分电路采用独立供电的方式。
2 分布式系统软件设计
随着任务的增多,如何有效、合理地将任务分配给不同区域的每个植保机,使效率最高或代价最小,成为了新的问题。分布式系统由于具有分布性、并行性、透明性、共享性和健壮性,可作为植保机进行任务分配时的首选。
多植保机的任务分配问题可以将植保机看作智能体代理,即替代智能体代理去执行任务。智能体代理的内部结构如图5所示。

图5 智能体代理内部结构图Fig.5 The internal structure diagram of agent
其中,学习模块通过不断的学习智能算法,将其进行再学习后补充至知识库[6]。目前,任务分配的智能方法主要有协商方法、空间链方法、群智能方法等。其中,使用最多、应用最广泛的是群智能方法中的克隆选择算法。本文将采用人工免疫克隆选择算法[7]对多植保机的任务分配问题进行研究,步骤如图6所示。

图6 人工免疫算法进行任务分配的步骤图Fig.6 The step diagram of task assignment by artificial immune algorithm
1)首先,需要建立植保机的最终任务,即植保机进行作业时需要满足效率最高、能耗最低的要求,则
maxf=Afm+bfn=Afm+B[1-k(fnm+fnn)]
其中,A和B分别为植保机任务执行时的效益和代价系数,A和B的和为1;k为调节因子。
植保机的目标任务还包括任务的效益、执行过程中的路程和威胁,表达式为

为了保证任务值在处理时最大值取值相同,目标任务函数均进行了归一化处理。
为了保证植保机在进行任务执行时,1个任务只被1个植保机访问,且最终所有任务的效用最高,需要对目标函数建立约束条件。首先,所有植保机在任务执行过程中的飞行半径需要小于或等于植保机的可飞行半径Rs,约束条件为
2)其次,每架植保机的紧挨前序和后序任务只能有1个,其约束函数为
3)对于已经访问的任务,植保机不能再进行访问,其约束条件为
4)所有的任务均需要被植保机访问,这也是最重要的约束条件,其约束函数为
将以上任务函数和约束条件输入人工免疫算法系统,即可得到植保机任务分配的最佳方式。
3 试验结果
考虑到本文主要针对植保机的多任务调度和智能性能进行优化改进,在进行试验设计时主要进行多任务调度试验和智能变量喷洒试验。
3.1 多任务分配试验
在进行多任务分配试验时,采用内存为2GB的64位操作系统的计算机进行仿真试验。设定植保机的停靠机场数量为3,每个机场包括2架植保机,任务包括监控、喷洒等共9个任务。为便于记录,机场分别编号为F1、F2和F3,任务分别编号为A1、A2、A3、A4、A5和A6。将植保机的任务、数量以及距离等信息输入系统,采用人工免疫算法对任务进行布置,仿真结果如表1所示。

表1 多任务分配试验仿真结果Table 1 The simulation result of multi task assignment experiment
由表1可知:该多任务分配系统可以用于植保机任务的分配,且运算速度较快。
3.2 智能变量喷洒试验
为了验证该植保机是否可根据飞行速度的变量自动调整喷药量,保证喷药压力的稳定,进行了智能变量喷洒试验。选择1块500m×500m的试验田进行喷洒试验,喷洒液体为水。设定喷嘴压力为1~2MPa,喷嘴最大流量为25~33L/min,调整植保机飞行速度分别为1、2、5、7m/s。每个飞行速度的时间为20s,时长包括加速和匀速时间。记录植保机在每个飞行速度的理论喷药量和实际喷药量,试验结果如表2所示。
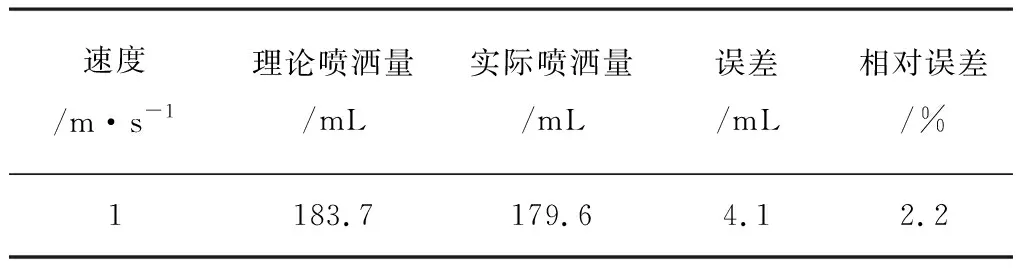
表2 智能变量喷洒试验结果Table 2 The result of intelligent variable spray test
由表2可知:在植保机作业过程中,药量的喷洒可以根据飞行速度调整,实现了智能变量喷洒。
4 结论
1)针对植保机智能化程度和安全性能无法满足要求及过多的信息资源造成植保机无法进行合理的任务分配问题,基于分布式系统对植保机进行了设计,并对其智能和安全性能进行优化。
2)为了对多植保机进行调度,解决多植保机的任务分配问题,对植保机的分布式系统进行了设计,建立了植保机的一对多的任务分配模型,并对模型进行人工免疫算法设计,以在较短的时间内得到最优的植保机任务分配方式。
3)为了验证植保机的性能,对植保机进行了多任务分配试验和智能变量喷洒试验,结果表明:植保机可根据飞行任务自动调整喷药量,实现了智能变量喷洒,且可快速地对植保机进行任务分配。
猜你喜欢
信息记录材料(2022年3期)2022-05-17
广西植保(2021年4期)2022-01-06
今日农业(2021年17期)2021-11-26
今日农业(2021年13期)2021-11-26
民用飞机设计与研究(2019年2期)2019-08-05
电子测试(2018年23期)2018-12-29
电子测试(2018年23期)2018-12-29
新农业(2017年2期)2017-11-06
中国公共安全(2017年7期)2017-10-13
计算机测量与控制(2017年6期)2017-07-01
