
水库库区融合点云漏洞边界提取方法
2024-01-26 02:46李朝辉彭刚跃
地矿测绘 2023年4期
李朝辉,彭刚跃
(河南省水利勘测设计研究有限公司,河南 郑州 450000)
0 引言
科技的发展极大地推动了测绘技术的进步,随着多波束测深系统和机载LiDAR技术的广泛应用,测绘的作业方式逐渐从效率低下的点测量模式过渡到效率高、覆盖面广的面测量模式,这为构建高精度的水库DEM模型提供了可能[1-4]。但由于地形条件限制、作业时间不同等多方面原因,在融合多波束测深数据和机载LiDAR数据时存在点云漏洞,导致构建的高精度DEM不完整。
针对上述点云漏洞问题,常规的手段是通过人工判断并进行加点,但在进行人工加点之前需要准确确定出漏洞的位置和范围。为构建完整可靠的水库DEM模型,介绍了一种点云边界提取方法。该方法可准确定位出融合点云的漏洞位置和范围,方便后续的漏洞点补充[5-7]。
1 点云边界提取方法
由于点云数据是三维离散数据,直接通过点云数据对边界进行检测较为复杂,通常采用的方法为根据点与各个领域点之间的邻接关系,基于边缘密度、梯度等特征确定该点是否为边界点,但计算过程较为复杂,水库库区采用激光雷达和多波束测深得到的点云数据密度不均匀,难以采用上述方式实现。
水库库区通常处于山区,其周边地形不平坦,为了适应库区地形,本文进行点云数据的边界提取时,采用最小二乘法对选取的点云数据进行拟合,得到拟合平面后再将点云投影到平面上实现点云数据的降维,在降维后点云的基础上再根据k邻域内点云数据的边缘特征提取边界,其流程[8-11]如图1所示。

图1 点云边界提取流程图Fig.1 Flowchart of point cloud boundary extraction
1.1 点云降维处理
点云降维处理的步骤为:

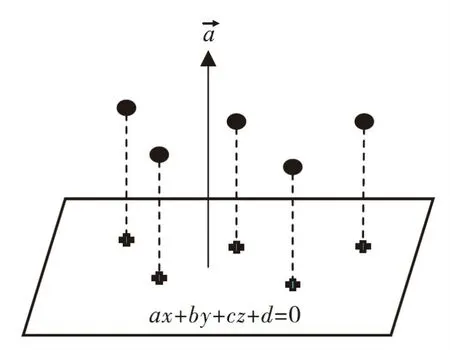
图2 降维处理示意图Fig.2 Schematic of dimensionality reduction processing
通过降维处理后,得到图2所示的投影坐标。
1.2 边缘特征计算
边缘特征计算是通过计算投影后的p点与k邻域内其他点q的方位角夹角,将夹角的最大值作为边缘特征值[14-15]。边缘特征计算原理示意图如图3所示。
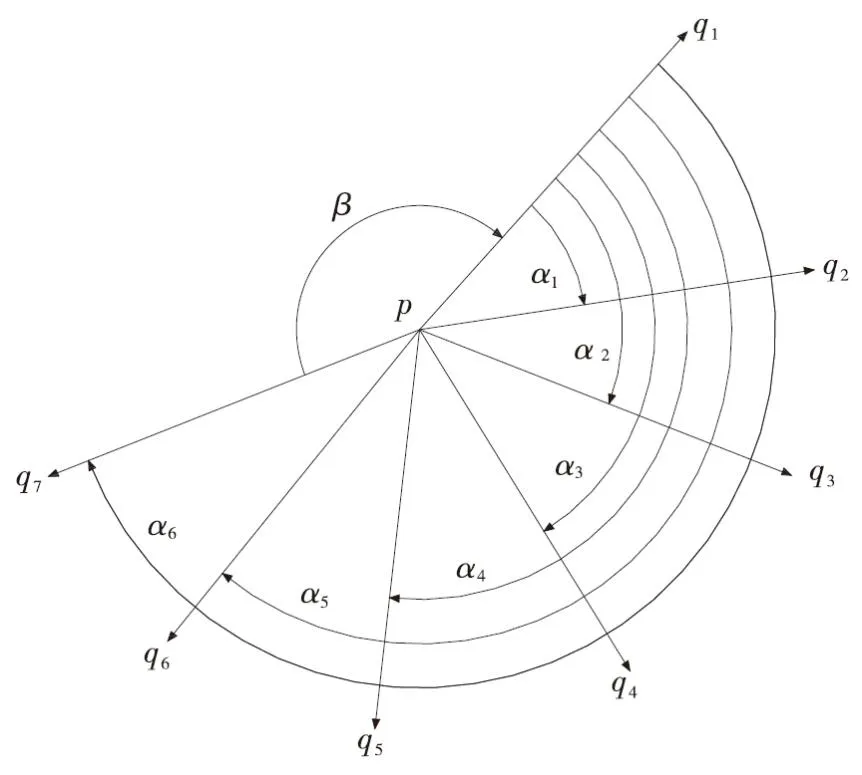
图3 边缘特征计算原理示意图Fig.3 Schematic of edge feature calculation principle
计算步骤为:
1)计算p点到其他点q的方位角;
2)将所有方位角按照大小进行排序,并计算相邻方位角的差值,其中,最大方位角和最小方位角之间的夹角计算方法为:
β=αpq1-αpq7+360°
(1)
3)对方位角夹角进行排序,返回最大值作为该点p的边缘特征值;
4)设置阈值σ,若边缘特征值大于σ则认为该点p是边界点;
5)对点云中所有点进行上述计算,重复点云降维处理和边缘特征计算步骤,直到全部计算完毕[16-17]。
1.3 算法实现
在点云边界的提取过程中,主要工作是点云数据的降维处理和边缘特征值的计算,具体算法实现过程如下:
1)输入点云数据,存储点云坐标信息;
2)根据平面方程,代入所有点云,采用最小二乘法建立误差方程式,并计算平面方程中的参数;
4)通过前文所述的计算步骤,对每个点进行计算,完成后得到整个点云数据的边缘特征集。
2 实例验证
试验数据采用河南省某水库库区的数据,地形条件为山地与峡谷,山区海拔高约600~1 000 m,地形起伏较大,岸边陡峭;水库水深约50 m,库区底部较为平坦。数据采集时间为2022年6月份,植被较为茂密,机载激光雷达采用Riegl VUX-120高精度激光雷达扫描仪,搭配Novatel公司的惯导系统,水下数据采用华测导航研发的无人船搭载NORBIT多波束测深系统,激光雷达系统在作业时水位低,多波束测深系统在作业时水位高,两个系统采集的数据存在部分重叠。
采用飞马无人机管家对激光雷达数据进行处理,通过点云解算和航带平差后,得到岸上部分点云数据,采用Hydro Survey软件对无人船数据进行处理,通过平滑、插值等处理后,得到水下部分的无人船点云数据。从数据中可以看出,点云数据存在一定的漏洞,如图4所示。

图4 融合点云漏洞实例Fig.4 Examples of loopholes of mixed point clouds
经过分析,产生漏洞的原因主要是多波束测深系统或激光雷达系统无法完整地扫描到目标导致,将数据进行融合后构建的DEM存在漏洞。采用本文方法,使用Python软件编程实现,设置k值为50,阈值σ为90度,对选取的两块点云数据进行处理,得到点云漏洞边界,提取结果如图5所示。
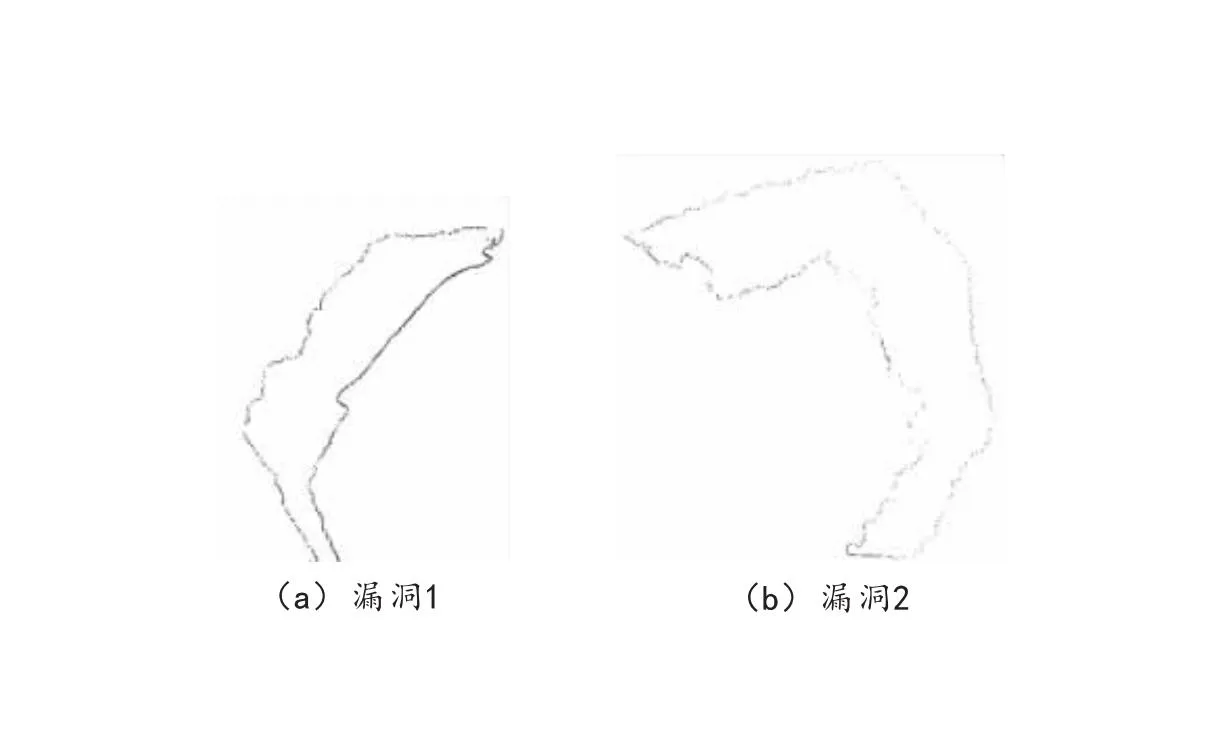
图5 点云漏洞边界提取结果Fig.5 Edge extraction results of point cloud loopholes
从图5可以看出,采用本文方法对点云进行处理时,提取出的边界与实际边界较为相符,但对于点云密度不均匀的区域会出现少量与实际不符的情况。采用本文方法对整个数据进行提取,共识别出78处点云漏洞,与人工识别和判断出的边界进行对比,将符合结果分为相符、基本相符、不相符,得到如表1所示的结果。
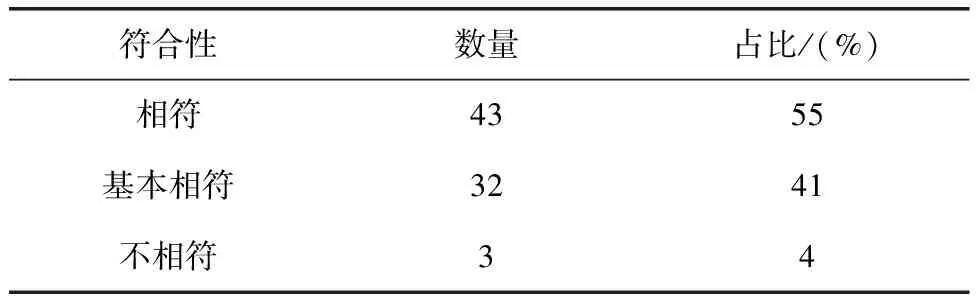
表1 提取边界与实际边界相符性统计表
根据提取边界与实际边界相符性统计表可以看出,采用本文方法提取出的边界整体与实际情况较为相符,仅有3处与实际不符,主要原因是这几处点云密度不均匀。由此可以看出,本文采用的方法提取出的点云边界较为可靠。
3 结束语
为构建完整可靠的水库库区DEM模型,需要将水下数据和陆地数据进行融合。针对机载LiDAR与多波束测深数据融合后出现的漏洞问题,介绍了一种基于k邻域内点云边缘特征的边界提取方法。通过对算法和原理进行分析,并采用水库库区的实例数据进行计算和提取,与实际边界进行对比。实例证明,本文方法提取出的边界与实际边界较为相符,提取结果可靠。
猜你喜欢
北京测绘(2022年5期)2022-11-22
车主之友(2022年4期)2022-08-27
汽车观察(2021年8期)2021-09-01
卷宗(2021年2期)2021-03-09
空间科学学报(2020年4期)2020-04-22
海峡姐妹(2019年12期)2020-01-14
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
河南科技(2015年18期)2015-11-25
计算物理(2014年1期)2014-03-11
