大机动过载下不平衡转子的弯扭耦合振动分析
2024-02-21 03:49朱洋沈承王斌
机械制造与自动化 2024年1期
朱洋,沈承,王斌
(1. 南京航空航天大学 航空学院,江苏 南京 210016;2. 苏州顶裕节能设备有限公司,江苏 苏州 215213)
0 引言
随着技术的不断进步,军用无人机(UAV)在监视侦察、特定目标跟踪、战损评估等作战任务中发挥着越来越重要的作用[1]。为了大幅度提高机动性能,未来无人机的机动过载将远超传统战斗机。因此,有必要研究大机动过载条件下转子系统的动力学行为。
许多学者对转子系统的动态特性进行了大量的研究。COHEN等[2]考虑了由不平衡力引起的弯曲扭转耦合振动,并研究了转子系统的稳定性。ANANTHAN等[3]分析了涡轴发动机转子系统在俯冲、跳跃、滚动、反向滚动和上拉等机动动作下的振动响应。LIN等[4-5]研究了Jeffcott 转子在机动飞行条件下,考虑初始弯曲、不对称刚度和摩擦碰撞故障因素时的振动行为。ZHENG等[6]对大机动条件下4自由度单转子进行了理论分析和试验验证,但是未对高转速下转子的弯曲方向和扭转方向的耦合振动做出进一步分析。到目前为止,对大机动过载下转子系统的弯曲扭转耦合特性的分析仍然鲜有报道。
考虑支承处轴承的非线性力影响[7],本文利用拉格朗日方程、梁单元、圆盘单元理论和有限元法推导了不平衡转子系统在任意机动条件下的运动微分方程,并采用Newmark-β数值积分法结合Newton-Raphson迭代法进行求解。通过三维瀑布图和分岔图对转子运动的频谱特征以及周期性进行分析。
1 有限元建模
为了精确捕捉高频特征,区别于简单的欧拉梁模型,本文采用考虑剪切变形和转动惯量的Timoshenko梁单元、圆盘单元对不平衡转子系统进行建模。转子系统通过节点离散化,简化为一系列梁单元和带质量偏心的圆盘单元。
为描述空间机动飞行条件下转子系统的运动,参考文献[6],建立坐标系如图1所示,其中OXYZ为地面固定坐标系,oxyz为转子静坐标系,o′ξζη为圆盘转动坐标系。

图1 转子坐标系
利用拉格朗日方程可得到任意机动飞行条件下5自由度圆盘的运动微分方程:
(Kd+Kdu+Kdb)qd=Fdu+Fdb+Qd
(1)
式中:qd是圆盘广义自由度上的位移;Md、Cd、Gd、Kd和Qd分别为不考虑机动飞行条件下圆盘的惯性矩阵、阻尼矩阵、陀螺矩阵,刚度矩阵和外激励;Fdu为不平衡激励。Mdu、Cdu、Kdu为弯曲自由度和扭转自由度的耦合关系项。表达式如下:
(2)
(3)
(4)
由机动飞行产生的附加阻尼Cdb、附加刚度Kdb、附加激励力Fdb表达式如下:
(5)
(6)
(7)
式中:m、e分别表示圆盘质量和偏心量;XB、YB、ZB分别表示飞机沿X、Y、Z轴的平飞速度;WBX、WBY、WBZ分别表示飞机绕X、Y、Z的角速度;z为圆盘到坐标系oxyz原点的距离;IP、Id分别表示圆盘极转动惯量和直径转动惯量。
同理,利用Lagrange方程推导10自由度梁单元的运动微分方程:
(8)
式中:qe表示梁单元广义自由度的位移;me、Ce、Ge、Ke分别表示梁单元的质量矩阵、阻尼矩阵、陀螺矩阵和刚度矩阵;Ceb、Keb和Feb分别为机动飞行产生的附加阻尼矩阵、附加刚度矩阵和附加激励力。
进一步,将各轴段和圆盘的运动方程组合即可得到整个转子系统的运动微分方程:
Fu+Fb+Q
(9)
式中:q代表转子系统广义自由度的位移;m、C、G和K分别是转子系统的质量矩阵、阻尼矩阵、陀螺矩阵和刚度矩阵;Q和Fu分别是转子系统的外激励和不平衡激励;mu、Cu和Ku分别是转子系统的弯曲-扭转耦合关系项;Cb、Kb和Fb分别是转子系统机动飞行产生的附加阻尼矩阵、附加刚度矩阵和附加激励力。
2 计算模型
转子模型如图2所示。转子系统由2个支撑和3个带有偏心质量的圆盘组成。转子系统的相关参数如表1所示。
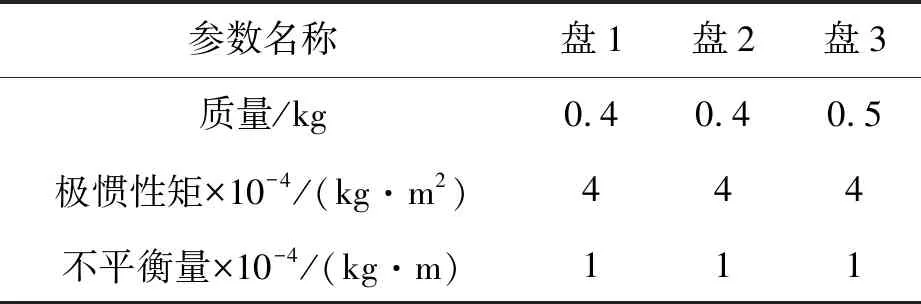
表1 盘的几何参数
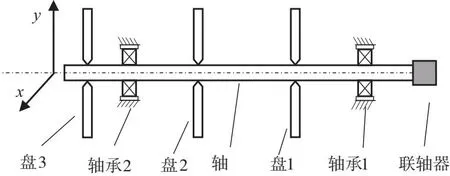
图2 计算模型
本文中水平转弯直径为3m。以平飞和水平转弯为例,分析了大机动过载条件下转子系统动力学特性的影响,机动飞行参数如表2所示,其中g代表重力加速度,所有未提及的飞行参数均设置为0。

表2 机动飞行参数
3 不平衡响应分析
3.1 临界转速
转子系统的临界转速采用特征方程法计算,2个支撑的刚度为7.99×109N/m。第1阶弯曲临界转速ωb1、第2阶弯曲临界转速ωb2以及1阶扭转临界转速ωt的结果如表3所示。为了验证模型的有效性,在ANSYS中建立了有限元模型预测临界转速。可以看到本文计算结果与ANSYS计算结果非常接近,误差小于1%,验证了本文方法的正确性。

表3 临界转速结果
3.2 频谱分析
为研究机动过载对转子动力学特性的影响,以平飞和水平转弯工况为例进行研究。考虑支承处轴承的非线性力,采用Newmark-β数值积分法和Newton-Raphson迭代法求解转子系统的稳态响应。
圆盘2在水平飞行和水平转弯工况下的弯曲振动响应的三维瀑布谱图如图3和图4所示。零频成分表征转子静位移。机动转弯条件下,在水平方向上,转子系统受到机动飞行产生的恒定离心力,静态偏移不随转速变化。而在垂直方向上产生与转速相关的附加陀螺力矩,这导致静态偏移随转速变化。

图3 圆盘2水平方向三维瀑布图
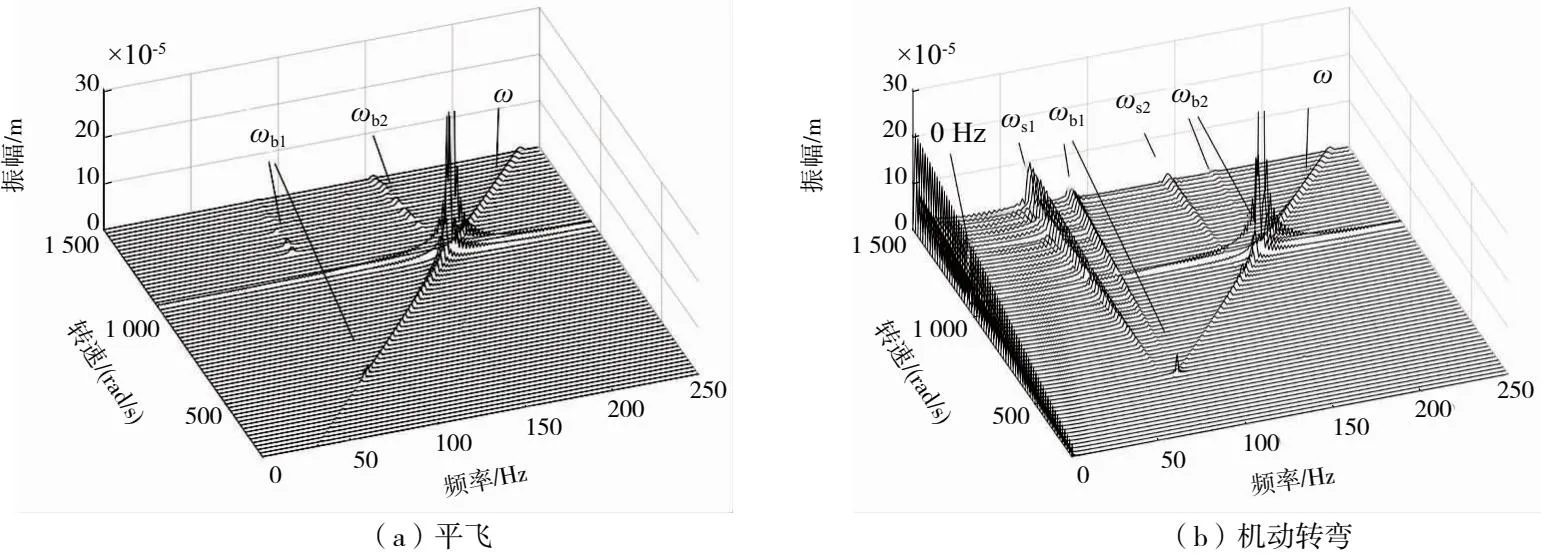
图4 圆盘2竖直方向三维瀑布图
水平飞行条件下,弯曲振动响应的频率分量主要包括转子转速ω,2个振动峰值分别对应1阶弯曲临界转速ωb1和2阶弯曲临界转速ωb2。此外,当转子的转速ω分别超过ωb1和ωb2时,可以观察到频率为ωb1和ωb2的次谐振动分量。
与水平飞行相比,水平转弯工况下频率分量发生了显著变化。弯曲振动中的次谐振动分量ωb1和ωb2通过机动飞行被放大,并且由于机动飞行产生的水平和垂直方向之间转子的不对称刚度和阻尼,新的次谐频率分量ωs1和ωs2被诱发。
水平飞行和水平转弯工况下扭转振动响应的瀑布图如图5所示。转子的扭转振动响应定义为转子上圆盘1和圆盘3之间的相对扭转角。在水平飞行条件下,扭转的主要频率分量主要包括零频成分和ωt成分。在水平转弯条件下,弯曲振动中的次谐振动幅值被放大,由于弯扭耦合作用,所有次谐振动都被传递到扭转自由度上。扭转自由度上的频率成分有弯曲临界转速成分ωb1,ωb2,扭转临界转速ωt以及次谐振动频率ωs1、ωs2。1阶扭转临界转速ωt处的响应被充分激发。

图5 转子扭转方向三维瀑布图
3.3 周期性分析
图6显示了圆盘2在水平飞行和水平转弯工况下弯曲振动响应的分岔图。与平飞相比,当转子速度ω超过1阶弯曲临界转速ωb1时,水平转弯条件下转子运动的周期性明显变差。
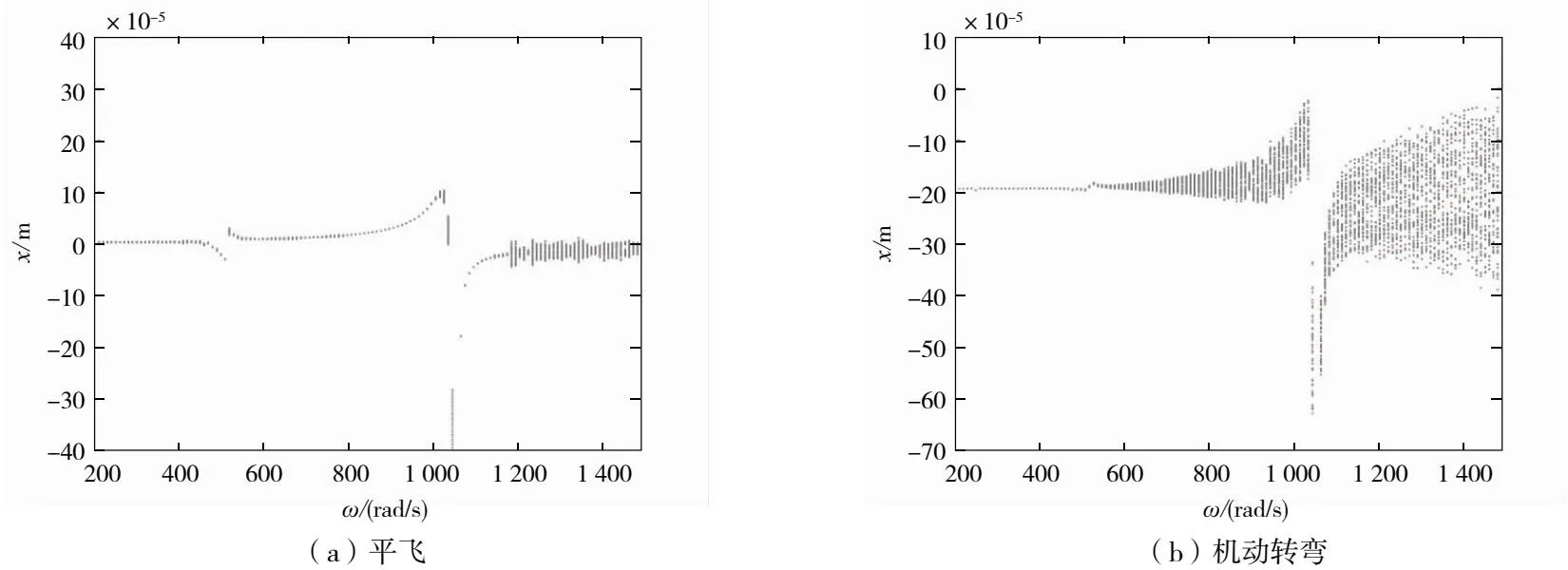
图6 圆盘2水平方向分叉图
4 结语
本文考虑弯扭耦合效应,利用有限元方法建立了任意机动飞行条件下不平衡转子系统的动力学理论模型。通过数值模拟,得到如下结论。
1)当转子转速大于弯曲临界速度时,大机动过载产生的不对称附加刚度和阻尼会引起新的次谐振动分量,同时增大了原有次谐振动幅值。
2)大机动过载增强了弯曲方向和扭转方向的耦合效应。弯扭耦合作用使得次谐振动分量传递到扭转方向。
3)在大机动过载条件下,当转子转速超过1阶弯曲临界转速时,不平衡转子系统的周期性会明显变差。
猜你喜欢
数学物理学报(2021年3期)2021-07-19
数学年刊A辑(中文版)(2021年2期)2021-07-17
数学物理学报(2021年2期)2021-06-09
装备制造技术(2020年3期)2020-12-25
石材(2020年6期)2020-08-24
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
数学物理学报(2017年1期)2017-06-05
红蜻蜓·低年级(2017年3期)2017-03-30
数学物理学报(2016年6期)2016-04-16