三维激光扫描声呐系统在渡槽水下结构检测的应用
2024-03-07 02:14甘晓洁
海河水利 2024年2期
甘晓洁
(海南省水利水电勘测设计研究院有限公司,海南 海口 570100)
渡槽工程水下结构事关渡槽输水安全,水下质量安全检测十分重要,目前国内大多数利用水下机器人或者传统声呐等设备开展水下结构扫描检测。综合来看,目前各种水下检测手段和措施都存在一定的局限性和不足[1,2],对诸如渡槽等构筑物水下基础部分质量检测适用性不足,不符合较高精度要求的水下质量检测工作所需。三维激光扫描水下声呐成像是一种采用发送和接收声波实施远长度测定的有效方法,声波通常有单波束和多波束2 种。三维激光扫描声呐系统采用先进的三维显示技术,可以对水下大型目标的轮廓进行更详细的描述。综合比较当前多种探测手段发现,三维激光扫描声呐系统是一种用于水下结构质量检测鉴定效果更好的手段[3,4]。所以,本文以三维激光扫描声呐系统在某渡槽水下基础检测应用为研究对象,阐述该系统的主要配置、工作原理、运用情况和适用范围,对某大型渡槽基础水下结构质量检验探测结果进行分析,结果表明该系统检测精度高、适用性较好。
1 三维激光扫描声呐系统主要配置和工作原理
1.1 系统主要配置
三维激光扫描声呐系统主要由换能器、影像分析处理器、数据采集工作站和传输线路等构成,如图1所示。
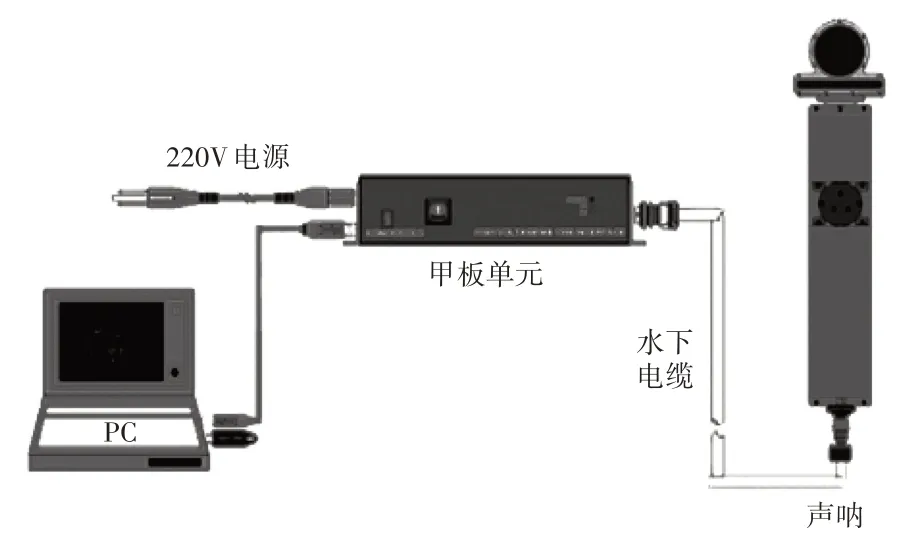
图1 系统结构
1.2 系统主要技术指标
三维激光扫描声呐系统主要技术指标,详见表1。
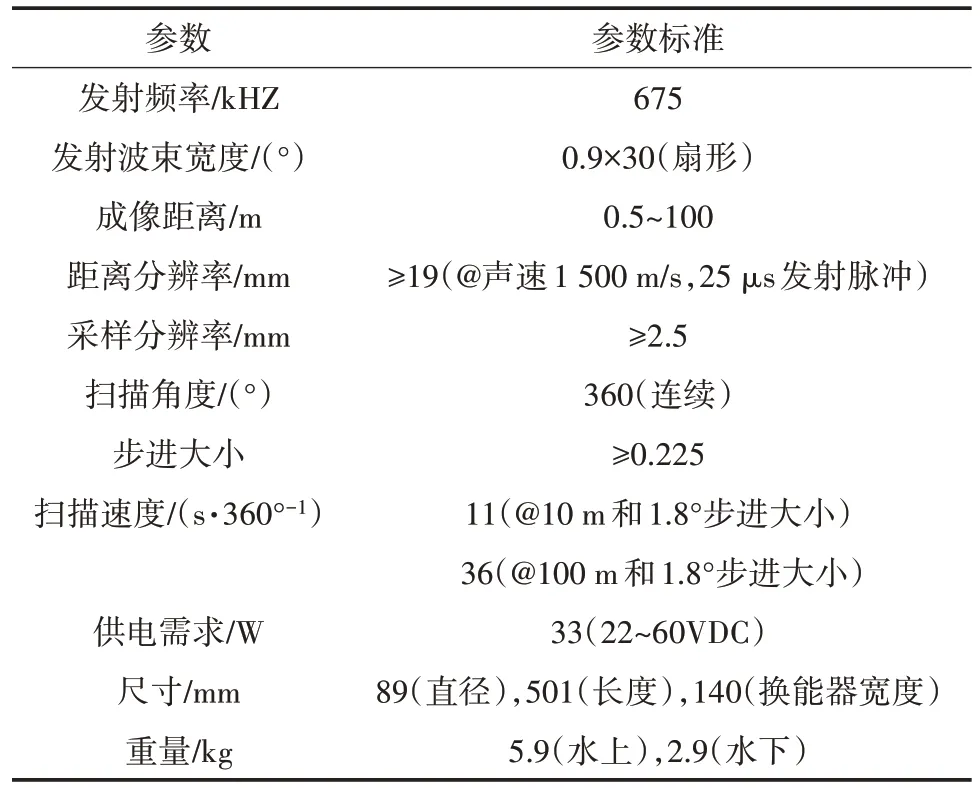
表1 系统关键技术参数
1.3 系统工作原理
三维激光扫描声呐系统通常由窄波束回声测深设备(主要包括换能器、测量船摇摆传感装置、收发机)和回声处理设备(主要包括计算机、数字磁带机、数字打印机、横向深度剖面显示器、实时等深线数字绘图仪、系统控制键盘)两大部分组成。三维激光扫描声呐测深一般借助设置在船底部或拖体上的声学基阵,向垂直于航向的河床发出超宽声束,接收河床底部的反射波束信号,使用模拟数字信号处理器多次转换形成多波束,能够采集到多个采样点的水深等基础信息。测量条带可以涉及水深的2~10倍区域以内,结合野外采集的卫星定位和姿态信息,自动形成高清的数字影像。探测作业时,船舶搭载三维激光扫描声呐发射的每一个声脉冲除了采集到船舶正下方垂直水深,还可以同时获得垂直于船舶航迹平面内的多个水深值,一次测量可以覆盖较宽的扇区,从而得到较高精度的河床的大小、形状和高程[5,6]。
2 渡槽基础水下细部结构检测实例
某渡槽始建于1954年11月,并于1956年5月通水运行,是20世纪50年代国内具有一定代表性的大型钢筋混凝土渡槽。渡槽侧面和槽墩基础平面分布如图2所示,整个渡槽位于两山峡谷之间、年均径流量巨大,3 号和4 号墩位基础部分长期立于水下,墩位基础周边水流湍急,纵向河床冲刷严重,借助三维激光扫描声呐对3 号和4 号渡槽水下基础部分周边河槽情况进行全面扫描,重点探测4 号墩位的右侧部位情况。
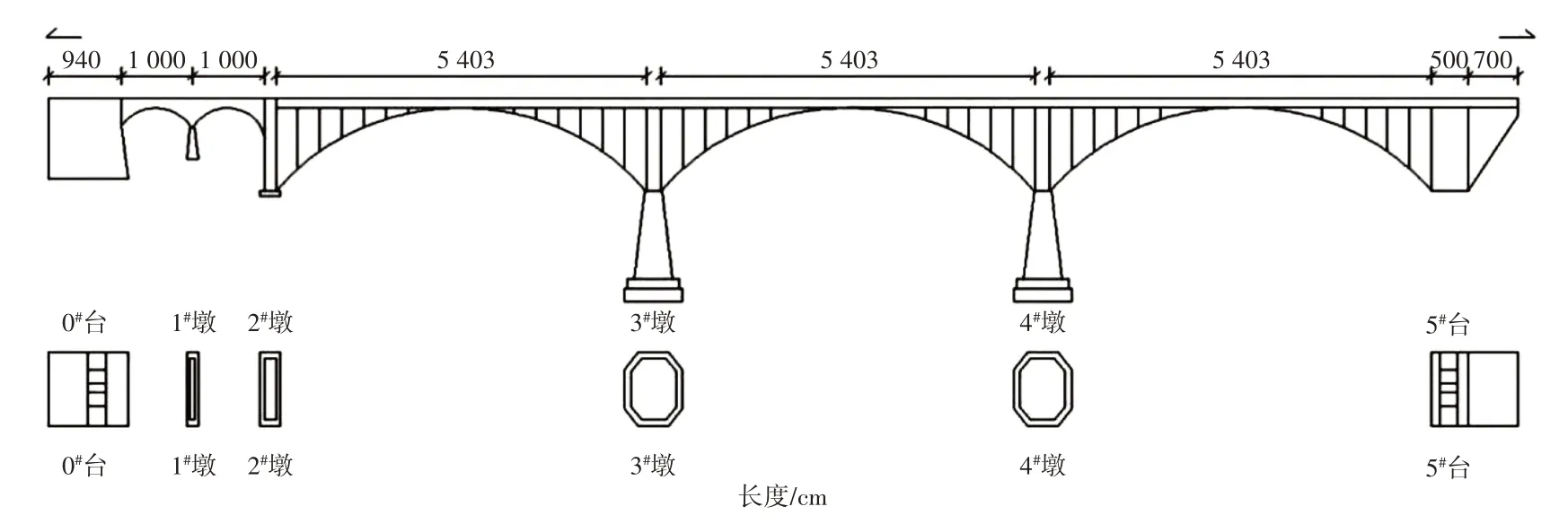
图2 某渡槽侧面及桩基平面
利用三维激光扫描声呐系统扫描距渡槽位置及渡槽上下游25 m 以内的河床地形,全面掌握渡槽桩基础周围地形地貌及冲刷、淤积状况并分析其原因。
2.1 三维激光扫描声呐系统探测结果分析
借助三维激光扫描声呐系统扫描检测渡槽3 号桩底部发现,3 号桩基础左侧(下游方向为向前)河底存在冲刷沟,沟底最大水深7.5 m,河床底部距离渡槽墩位水下基础距离3.4 m。
借助三维激光扫描声呐系统扫描检测渡槽3 号桩基础底部结果显示,3 号桩基础右侧河槽底部区域有冲刷沟,沟底最大水深约7.7 m,河床底部距离渡槽桩基础顶部高度约3.5 m。
借助三维激光扫描声呐系统扫描检测渡槽4 号桩底部发现,4 号桩基础左侧(下游方向为向前)河底存在冲刷沟,沟底最大水深8.9 m,河床底部距离渡槽墩位水下基础距离5.0 m。
借助三维激光扫描声呐系统扫描检测渡槽4 号桩基础底部结果显示,4 号桩基础右侧河槽底部区域有冲刷沟,沟底最大水深7.5 m,河床底部距离渡槽墩位水下基础距离3.5 m。
为全面摸清渡槽建设情况,经查阅施工方案发现渡槽当初使用沉箱法完成。竣工资料显示,渡槽3 号墩位桩基础沉箱高度3.8 m,渡槽4 号墩位桩基础沉箱高度5.3 m。地质资料显示,河槽底部岩石易于风化,钢筋混凝土井筒深入岩石0.9 m,根据三维激光扫描声呐系统探测数据,计算分析渡槽3号和4号墩位桩基础深入岩石长度,结果详见表2。
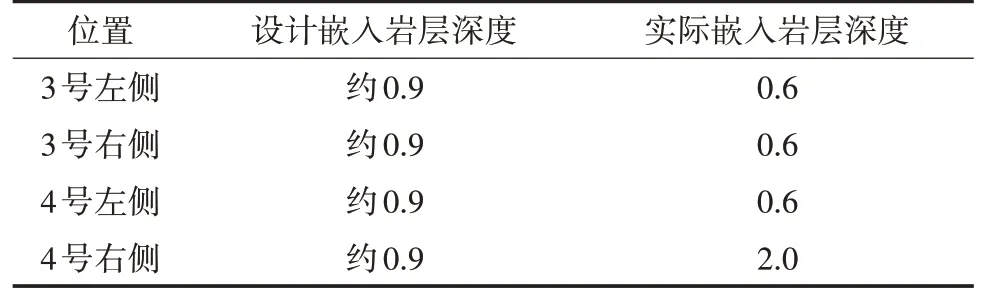
表2 渡槽3号和4号墩位桩基础深入岩层深度计算结果 m
该渡槽从1956年6月建成通水以来,3号和4号墩位桩已经经历了66 a河水冲刷。与一般的潜水相机比较而言,新时期的三维激光扫描声呐系统除了能够实现河槽全地形立体扫描分析外,还能够按照探测数据信息准确锁定渡槽水下基础范围冲刷情况。根据探测数据分析,渡槽3号和4号墩位桩左侧水下基础深入岩石的深度降低到0.6 m,与原设计嵌入岩石深度比较发现,2 个墩位桩左侧水下基础附近形成20~30 cm 的冲刷沟,必须引起渡槽工程管理部门高度重视。
2.2 结果复核
除了三维激光扫描声呐系统以外,多波束测深系统对于大面积的河床地形测绘不仅工作效率较高,可以精确地测量河底的深度,而且能够提供河床底地形连续的、高精度的数据,覆盖一个宽带区域。但是,三维激光扫描声呐系统主要用于对特定物体或结构的细节进行三维成像,精细程度更高[7]。2 种水下监测方法具有很强的互补性,如能将二者优势互补,对于水下地形和构筑物进行定性、定量分析和全面、详尽解释将十分有意义。
在该渡槽水下探测过程中,渡槽基础周边水流速较大,为确保作业安全,三维激光扫描声呐系统只对渡槽4号墩位桩基础部分立面实施探测。探测数据显示,该渡槽桩基础水下部分没有特别大的缺陷或冲刷。在三维扫描声呐形成的影像资料中,选择渡槽4号墩位桩基础右侧河槽至渡槽水下桩基础距离为3.421 m,如图3 所示,多波束测深系统探测结果为3.412 m,实测距离为3.420 m。2种方法探测结果与实测距离相比,三维激光扫描声呐系统探测距离精度更高。
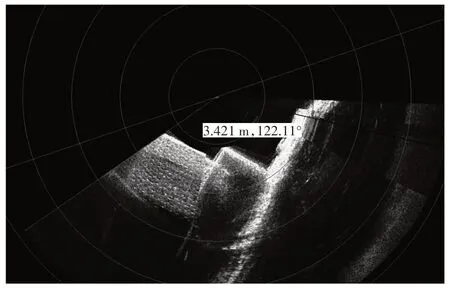
图3 三维激光扫描声呐系统成像
2.3 探测特殊情况处理
2.3.1 定位问题
在该渡槽水下探测过程中,渡槽底部受上部空间影响,GPS难以接收卫星信号,三维激光扫描声呐系统无法作业。同时,项目所在地实际气温低于惯导系统适用的最低工作温度要求,所以使用的MGC惯导系统无法正常运行,造成后期采集信息分析时渡槽各墩位桩基础部分无法整体拼接难以形成较为完整的三维立体效果图。在项目区域低温气候条件下,可以选择高性能适用于较低气温条件下作业的惯导设备实施定位[8]。
2.3.2 水位问题
在该渡槽水下探测过程中,由于探测区域没有以往的水文资料,所以区域理论计算深度基准难以测定。实际长期观测结果显示,河流上午水流速快,水位变化频率较高,但是下午水位变化较慢。下一步探测时,拟借助自容式水位仪器,不间断获得76 h水位信息,按照基准面计算公式推导计算临时基准面。如果与国家85高程基准联合测量,那么可以确保探测信息准确。
2.3.3 三维激光扫描声呐系统探测注意事项
在该渡槽水下探测过程中,三维激光扫描声呐系统探测时由于作业空间所限,所以其换能装置难以与渡槽各墩位桩基础水下部分全部贴合。后续探测作业中,三维激光扫描声呐系统换能器必须紧挨渡槽各墩位桩基础水下部分,便于采集高清晰影像资料,确保探测结果精准性。
3 结语
针对渡槽水下桩基和附近河槽实施三维激光扫描声呐系统扫描,可以采集高精度的水深点云数据,定量分析渡槽各墩位桩基础水下部分和河槽底部的冲刷情况[9,10]。借助三维激光扫描声呐系统扫描探测渡槽各墩位桩基础水下部分和河槽情况,可以采集高分辨率的声纳影像资料,复核校对三维激光扫描声呐扫描结果的精准情况;可以借助图像资料研究渡槽各墩位桩基础水下部分和河槽变化,分析现存的工程质量缺陷和水流冲刷侵蚀情况。实际探测结果表明,三维激光扫描声纳系统探测效果明显,效率高质量佳,非常有利于大型构筑物工程管理单位工程维修养护和安全监测。该技术具有极大市场应用前景,值得大范围推广使用。
猜你喜欢
建材发展导向(2022年24期)2022-12-22
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
海洋信息技术与应用(2020年3期)2020-08-24
中华建设(2020年5期)2020-07-24
水利规划与设计(2020年1期)2020-05-25
小学科学(学生版)(2019年10期)2019-11-16
河北水利(2017年6期)2017-09-05
水利科技与经济(2016年2期)2016-04-21
水道港口(2015年1期)2015-02-06
声学技术(2014年1期)2014-06-21