光伏跟踪电机的分数阶自抗扰控制方法
2024-03-22 03:43陈雪辉
电力系统及其自动化学报 2024年2期
刘 伟,胡 磊,陈雪辉,高 婷,李 昊
(1.安徽建筑大学机械与电气工程学院,合肥 230601;2.高端装备关键摩擦副安徽省重点实验室,合肥 230301)
随着清洁能源的大力发展,节能减排成为人们越来越关心的问题,太阳能光伏发电是一种清洁可再生能源,具有低成本、运行维护简单等优点,因此越来越多地被应用在能源开发领域中。由于太阳能光伏发电站大多处于恶劣环境下,当外部环境发生急剧变化时,会导致整个支架跟踪系统失稳。除外部环境等不可控因素导致的未知扰动外,跟踪系统内部还存在着各部件之间的摩擦扰动,使得光伏跟踪设备精度降低、转动不平稳。为应对太阳能跟踪设备存在的跟踪控制失调、鲁棒性差、系统误差较大和系统响应速度降低,导致太阳能发电效率降低,无法长期稳定运行等问题。文献[1-2]将自适应和数字动态面算法应用于光伏发电伺服系统中,采用神经网络优化比例积分微分PID(proportional-integral-derivative)参数,加入的磁滞量化器减少了控制器的抖振现象;但系统内部耦合较复杂,解耦难度高,不利于大规模应用。文献[3]利用降阶的方式简化电机三环控制系统,根据系统动态响应要求限定控制器参数;但控制器的三环PI控制会造成误差累计,系统失调。
自抗扰控制ADRC(active disturbance rejection control)将导致被控系统变化的外部条件划归为未知扰动,仅利用被控对象输入输出数据。文献[5]采用简化后的自抗扰控制进行双环转速控制,能够在各种工况下拥有快速的动态响应能力;文献[6]根据扩张状态观测器估计双馈风力发电机DFIG(doublyfed induction generator)系统内部复杂耦合变量,并且设计出的滑膜控制方法抑制滑膜面切换时的抖振现象,但利用扩张状态观测器和滑膜控制算法的级联控制器,稳定性不足,受到剧烈外部扰动时易失稳;文献[7]设计的滑膜自抗扰控制改善了系统稳定性,滤波器进行相位补偿,提升了控制效果;但是滑膜控制对模型要求高,很难扩展至其他工况控制;文献[8]根据负载转矩前馈补偿和自抗扰控制,实时监测负载转矩的大小补偿给电流环;但转矩观测器具有滞后性,导致系统对突变转矩不能快速响应反馈。
当光伏跟踪电机在强非线性和不确定强扰动的工况下,线性自抗扰控制由于整数阶控制本身的局限性,系统超调与响应时间始终无法达到运行要求,并且会放大噪声引起振荡;而分数阶微分控制能够抑制高频振荡,在误差波动较大时,系统微分响应依旧平稳,因此对系统的抗扰性较强。分数阶自抗扰控制算法,增强了系统对未知外力造成的误差的快速跟踪控制能力。文献[9]为解决电机运行中的复杂线性问题,利用ADRC 本身的抗扰性,加上粒子群算法寻优分数阶控制器参数,但优化后的参数有一定几率为局部最优解,无法获得最优效果;文献[10]使用可变值域的自适应模糊算法优化分数阶控制器,降低了系统的不确定性,但调整参数过多,增加了系统的操作难度;文献[11]提出的最优自抗扰控制,通过D-分解方法得出的全局稳定域和观测器带宽的稳定域相似,但控制器采用简化的三环控制可能会造成系统累计误差。
以上研究方法大多基于被控对象模型的准确建模,在未知扰动和外部极端环境改变的条件下,系统无法快速响应,抗干扰能力较低;由减速器和光伏跟踪支架组成的负载端在系统运行时也会产生高频振荡。针对以上问题,依据负载反馈下的速度控制模型,增加了对负载端扰动的反馈补偿;通过迭代优化后的最速跟踪函数以及线性组合的分数阶扩张状态观测器来抑制高频振荡,并且使得观测值快速收敛,加快负载端动态响应速度;最终提高了太阳能跟踪系统鲁棒性,优化了追踪性能。
1 光伏跟踪系统模型
太阳能控制器的驱动装置由永磁同步电机连接减速器与太阳能支架组成,齿轮箱作为柔性联轴器。电机的机械运动方程为
式中:T为机械转矩;TL为负载转矩;J为转动惯量;ω为角速度;p为极对数;B为动力黏滞系数。
根据式(1)得出电机端施加的驱动力矩TM与负载端角速度ωL之间的传递函数关系,表示为
式中:JM、JL、JP分别为电机、负载和系统转动惯量;i为传动系统速比;KS为弹性系数;bS为阻尼比。
在负载反馈下的速度控制中,考虑到外绕ω,电机端施加的驱动力矩TM与负载端角速度ωL关系为
式中:u为系统输入;y为系统输出。
对上述系统进行简化处理,采用积分的方式降低系统的阶数,则太阳能光伏跟踪速度控制系统的二阶关系表示为
负载反馈下的速度控制,依据负载端运动信息,能够更快地对负载端扰动做出反馈补偿;为抑制负载端产生的高频振荡,优化分数阶自抗扰控制器中的跟踪微分器来抑制高频振荡,线性组合后的分数阶扩张状态观测器能够加快观测值的收敛,减少了系统响应时间。
2 分数阶自抗扰控制器
针对负载反馈下速度控制的高频振荡和动态响应问题,利用负载模型建立具有α阶相称的二阶ADRC系统,线性变化后表示为
式中:w为系统内外部总扰动;b为系统增益参数。
分数阶自抗扰控制器FOADRC(fractional-order active disturbance rejection controller)控制结构框图如图1所示。

图1 分数阶自抗扰控制器Fig.1 Fractional-order active disturbance rejection controller
图1中:xd(t)为系统理想输入信号;x1(t)、x2(t)分别为xd(t)、(t)的跟踪信号;ε1(t)、ε2(t)为过渡过程中的误差信号;u0(t)为分数阶PID控制器输出信号;z1(t)分别为电机转速观测值;z2(t)为z1(t)的分数阶微分;z3(t)为观测的系统扰动;b0为补偿因子;u(t)为被控系统输入信号;y(t)为系统实际输出信号。
2.1 分数阶微积分
将微分算子由整数阶推广到分数阶,在保证系统稳定的同时,增加系统的灵活性。统一的分数阶微积分算子表示为
式中:f(t)为以t为自变量的函数;α为分数阶阶次,0<α<1;t和τ分别为自变量和积分变量;t0为变量下边界。
分数阶算子采用Oustaloup 法进行微分逼近,根据零极点传递函数划分一定频段[]ωb,ωh进行区间等分,在幅频范围内逼近一个分数阶算子。滤波器在频率两端的近似效果较差,当传递函数输出为常量时,分数阶系统无法稳定,因此采用改进后的Oustaloup滤波器,表示为
式中:N为滤波器阶次;k=1,2,…,N;b1、c1分别为加权参数;
2.2 分数阶跟踪微分器
跟踪微分器TD 为信号提供过渡过程,主要实现控制信号的快速响应和转速超调之间的稳态,引入的微分信号可以抑制控制信号中的高频噪声。基于被控系统状态,分数阶跟踪微分控制器FOTD(fractional-order tracking differentiator)表示为
式中:h为系统采样周期;h0为滤波因子;r0为快速因子;fhan()为最速跟踪函数。
当光伏跟踪系统运行处于稳定状态,负载端会产生高频抖振,采用迭代优化后的fhan(x1-xd,x2,r0,h0)优化跟踪微分信号中的抖振。针对fhan函数中sgn函数导致系统不稳定性上升,tanh函数在零点附近的输出曲线为平滑曲线,能有效解决sgn 函数的零点漂移问题,即
随着自变量x趋近于无穷时,tanh函数与sgn函数近似度越高。改进后的最速跟踪函数fhan为
采用优化后的最速跟踪函数fhan 的分数阶跟踪微分信号控制器,能够有效地抑制微分信号中的高频振荡,使得分数阶自抗扰控制器输出稳定。
2.3 分数阶扩张状态观测器
扩张状态观测器ESO 的作用是观测被控对象的内外部扰动(如一些未知模型和扰动、非线性耦合等),并且实时输出观测误差给补偿控制系统,此过程不需要被控对象扰动的精确模型。
针对光伏跟踪系统的负载反馈,假设x1为负载转子角速度ωL,x2为角加速度αL,x3为系统总扰动w,则有
式(5)经过线性变化后的分数阶系统表示为
式中:y为负载转子角速度;u为电机端施加力矩。
分数阶扩张状态观测器FOESO(fractional-order extended state observer)对系统进行观测补偿,根据负载反馈下的速度控制模型,系统总扰动为g(),其中分数阶部分视为内部扰动,分数阶ESO的状态空间方程为
式中:
分数阶ESO表示为
式中:δ为线性段区间长度;β1、β2和β3分别为观察者增益;ε为观测器偏差;nfal()为组合函数。
由于sinε和tanε在零点附近拥有比ε更好的收敛性,故采取fal 函数与sinε、tanε线性组合为nfal 函数,加快系统收敛速度。组合后的nfal 函数表示为
根据整数阶扩张状态观测器的带宽参数化法,利用观测器带宽,使得ESO的线性化在提高控制器的观测效率同时,依旧保持较高的观测精度。将观测器增益线性化,则观测器带宽满足的特征方程表示为
式中,ω0为观测器带宽。
利用分数阶误差状态空间方程以及分数阶特性,拟合的整数阶稳定性推广证明分数阶稳定。根据式(13)和式(14),FOESO 的误差方程ei=zixi(i=1,2,…)表示为
根据终值定理可得
当|h(+∞) |≤M时,观测器误差可以表示为
式中:M为系统扰动幅值;为从n+1 个不同元素中取i-1 个元素的组合数。从式(19)中得出,观测误差与FOESO 的带宽成反比,带宽的上限也受限于观测频率的高低,因此带宽参数法所得出的观测频率和观测误差都在合理且高效的范围之内。
2.4 分数阶PIλDμ控制律
分数阶PIλDμ是将整数阶PID积分阶次α和微分阶次λ扩展至整个有理数区域,可以被应用到精密控制中。PIλDμ控制器的传递函数,表示为
式中:kp、ki、kd为控制器增益系数;λ、μ为分数阶阶次;ε1、ε0、ε2分别为误差信号、误差积分信号、误差微分信号。
分数阶扩张观测器状态估计值表示为
式中:y(t)为系统输出;xi为系统状态量;zi为分数阶自抗扰控制器状态观测量。
在负载反馈中,通过分数阶扩张状态观测器进行补偿的分数阶PIλDμ控制器表示为
式中,u0为外部扰动。
由于系统参数调节范围较大,综合分数阶PID性能考虑,采用观测器带宽进行参数整定,分数阶PIλDμ参数依据参数调优策略表示为
在保证控制器性能的同时,加快调参进程,缩短了研发周期。
3 仿真验证与分析
在整个光伏跟踪电机控制系统中,转速环采用改进型分数阶自抗扰控制。在仿真环境内搭建起分数阶ADRC 的PMSM 矢量控制模型,对照组采用传统型分数阶ADRC进行仿真对比。仿真环境中,电机参数如表1所示。

表1 电机参数Tab.1 Motor parameters
电机控制系统框图如图2所示。

图2 电机控制系统框图Fig.2 Block diagram of motor control system
3.1 电机负载运行仿真
为验证改进型分数阶ADRC和传统型ADRC的动态响应能力和鲁棒性,将负载端的目标转速设定为100 r/min,仿真实验电机从零初始状态启动,稳定运行后突加负载,所有控制器给出的负载条件和时间相同。
由图3 可以看出,电机从初始状态启动,传统型分数阶ADRC 控制在0.22 s 达到稳态,转速超调1.12 r/min,采用改进型分数阶ADRC控制稳态时间为0.17s,且系统无超调;在电机突加负载工况时,传统型分数阶ADRC 控制转速下降16.76 r/min,在0.21 s 达到稳定状态,相比于改进型分数阶ADRC控制转速下降9.12 r/min,并在0.15 s内达到稳定状态。改进型ADRC 比未改进ADRC 减少45.58%的转速波动,同时减少28.57%的稳态时间。根据仿真分析,改进型分数阶ADRC的系统快速响应能力优于传统型分数阶ADRC;在负载端受扰动的工况下,改进型分数阶ADRC拥有比传统型ADRC更好的动态响应和鲁棒性。
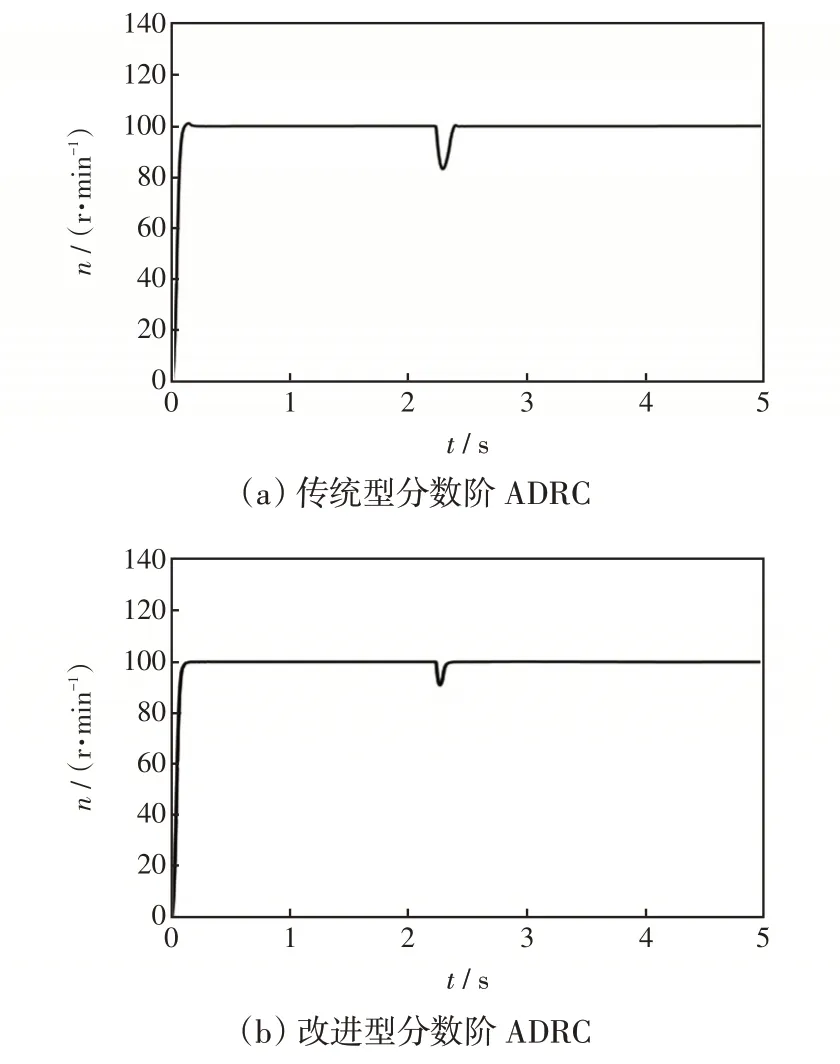
图3 仿真电机启动和负载转速波形Fig.3 Simulation of motor start-up and load speed waveforms
3.2 负载端振荡仿真分析
当改进型分数阶ADRC和传统型分数阶ADRC控制电机系统稳态运行后,为检验不同控制算法抑制负载端产生的高频振荡的能力,采集电机稳态运行时的高频振荡幅度。
由图4 可以看出,当电机运行在稳定状态时,传统型分数阶ADRC 控制的转速振荡幅度较改进型分数阶ADRC控制器更大,最大转速振荡幅度达到了2.64 r/min,而改进型分数阶最大转速振荡幅度仅为1.41 r/min,最大转速振荡幅度减少了46.59%。由此可知,改进型分数阶ADRC相较于传统型分数阶ADRC,有效地抑制了电机运行时负载端产生的高频振荡。
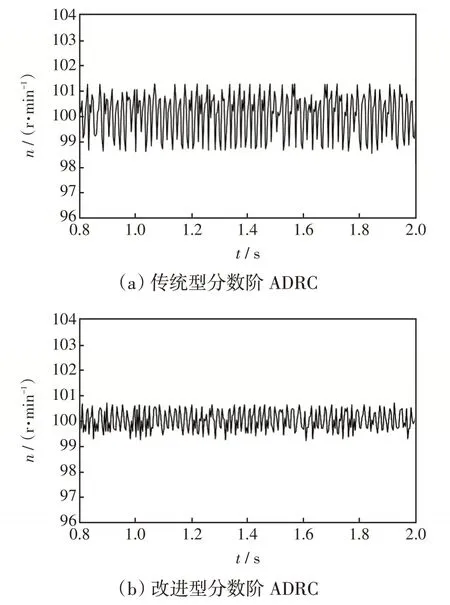
图4 仿真电机稳定状态下转速波形Fig.4 Simulation of motor speed waveforms in steady state
4 实验验证
为测试改进型分数阶自抗扰控制算法的可行性,搭建永磁同步电机速度控制系统实验测试平台,在该实验平台进行速度跟踪与负载振荡实验。平台由DC 电源、上位机、主控驱动板、实验电机、CAN分析仪、磁粉制动器、减速器传动系统、台架底座组成。核心部件选型如下:控制驱动板为ST 公司的STM32F407VET6 芯片,电机为57PM24V150W多编码器三相永磁同步电机,由上位机将目标指令通过CAN分析仪发送给电机主控驱动板,主控板经过信号处理驱动电机动作,电机经过减速器传动系统连接磁粉制动器,驱动实验负载。实验数据经过编码器采集后反馈给上位机,并在J-Scope 中实时显示电机运行状态。在相同时间内启动电机、突变负载端阻力,同时检测电机实际运行速度和目标转速之间的误差,以及负载端产生的高频振荡幅度,实验平台结构如图5所示。

图5 电机实验平台Fig.5 Motor test platform
图6 为传统型分数阶ADRC 和改进型分数阶ADRC 启动运行和突加负载扰动时的转速波形,负载端目标转速为100 r/min,在启动运行时,传统型分数阶ADRC 用时0.41 s 才稳定,改进型分数阶ADRC 达到稳定状态用时0.34 s,稳态时间缩短了17.07%;在突加负载工况条件下,传统型分数阶ADRC用时0.24 s才稳定,转速波动下降19.12 r/min。而改进型分数阶ADRC控制在0.19 s时就达到稳定状态,转速波动下降12.05 r/min,因此改进型分数阶ADRC 控制相比于传统型分数阶,ADRC 控制稳态时间缩短了20.83%,控制转速波动减少了36.97%。

图6 实验电机启动和负载转速波形Fig.6 Waveforms of test motor start-up and load speed
图7 为不同控制器控制电机在稳定状态时的转速波形,从图中看出,传统型分数阶ADRC 控制的转速振荡幅度为3.56 r/min,而改进型分数阶ADRC控制的负载端转速振荡幅度仅有2.15 r/min,最大抖振幅度减少了39.60%。

图7 实验电机稳定状态下转速波形Fig.7 Speed waveforms of test motor in steady state
表2为分数阶ADRC控制在改进前后的性能对比分析,从电机启动和突加负载时的稳态时间、转速波动以及超调量等方面得出,在负载反馈下的速度控制中,改进型分数阶ADRC控制相比于传统型分数阶ADRC控制,对未知扰动具有更快的动态响应和更好的抗干扰能力,针对负载端高频振荡抑制效果优越,系统运行状态也更加平稳。
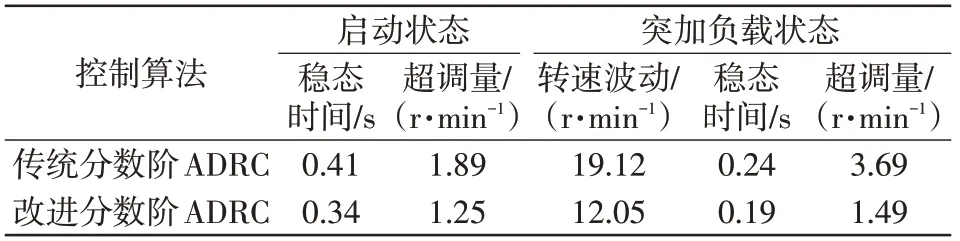
表2 电机运行状态Tab.2 Running states of motor
5 结 语
在光伏跟踪控制系统中,针对运行环境的复杂性、运行精度等要求,传统永磁同步电机控制算法所得出的实际模拟效果较差,负载端产生大量的高频振荡。通过采集电机-减速器-光伏太阳能板所组成的光伏跟踪传动装置的负载反馈运动信息,本文提出根据负载反馈下的运动信息进行速度控制,通过优化分数阶跟踪微分控制器和利用线性组合后的分数阶扩展状态观测器来抑制负载端产生的高频振荡,加快系统动态响应,提高系统鲁棒性。仿真和实验表明,改进型分数阶ADRC对比传统型分数阶ADRC 拥有更快的动态响应和更好的抗干扰能力。因此,本文所提出的控制算法对于太阳能光伏发电技术的推广具有重要意义。
猜你喜欢
求知导刊(2022年1期)2022-03-27
一重技术(2021年5期)2022-01-18
数学物理学报(2021年2期)2021-06-09
数学物理学报(2019年5期)2019-11-29
社会科学研究(2018年3期)2018-12-21
测控技术(2018年4期)2018-11-25
当代体育科技(2018年16期)2018-06-11
广东技术师范大学学报(2016年5期)2016-08-22
哈尔滨师范大学自然科学学报(2015年1期)2015-04-19
电机与控制应用(2015年2期)2015-03-01