飞机噪声适航起飞等效试验方法研究
2024-03-24 14:45袁艳
装备制造技术 2024年1期
袁 艳
(电子科技大学成都学院,四川 成都 611731)
0 引言
随着民航业的快速发展,飞机噪声成为一大关注点。为降低噪声对人们生活的影响,国际民航组织ICAO[1]提出了更为严格的噪声严格度适航审定规章。
噪声适航审定主要包括噪声数据的获取以及航迹的测量两大部分。Lothar 等[2]提出了飞机在起飞和进近阶段降低噪声值的方法;Antonio[3]提出了噪声预测方法的概念以及Tabaste[4]提出了虚拟飞行适航审定方法。闫国华等[5]对飞机噪声等效飞行方法的航迹部分进行研究,但都未对提出一套完整的等效试验方法。
就美国宇航局NASA 提出的飞机噪声预测计划[6](ANOPP)并结合ANP 数据库相关数据以matlab 软件为工具载体,提出一套噪声适航等效试验方法,以达到减少多次反复飞行的次数和缩短适航审定周期的目的。
1 等效飞行程序
在飞机适航审定中需要测量三个阶段的噪声值,分别是起飞、边线以及进场。测量点位置如图1 所示。

图1 测量点位置
CCAR36 部[7]试验程序要求,在等效试验过程中噪声有效数据需要在PNLTM-10dB 这整段时间内,且必须记录航空器相对于跑道的位置以及飞机产生的1/3 倍频程噪声随时间的变化数据。起飞基准航迹如图2;其中10 dB 降区间是最终所需要的有效数据航迹段,为获取有效数据需要飞行员在符合规章条件下多次进行起飞降落飞行,但这样降低了适航审定的效率,国际民航局由此提出等效飞行程序。就起飞阶段飞行员,只需要在C 点前切入飞行,在F点后离开,反复飞行获取审定所需有效数据即可。

图2 起飞基准航迹
2 噪声值预测
2.1 实际航迹计算
根据ANP(飞机噪声和性能Aircraft Noise and Performance)数据库。利用相关程序和机型数据进行航迹的编程设计得详细航迹数据。
标准起飞航迹是与跑道中心线夹角为六度的直线;按照ANP 的数据经过matlab 软件编程处理得到实际的起飞航迹,因每一架飞机的起飞程序阶段都不一样,以机型737-800 为例,该机型一共有十个飞行程序阶段。实际航迹飞行图如3所示。
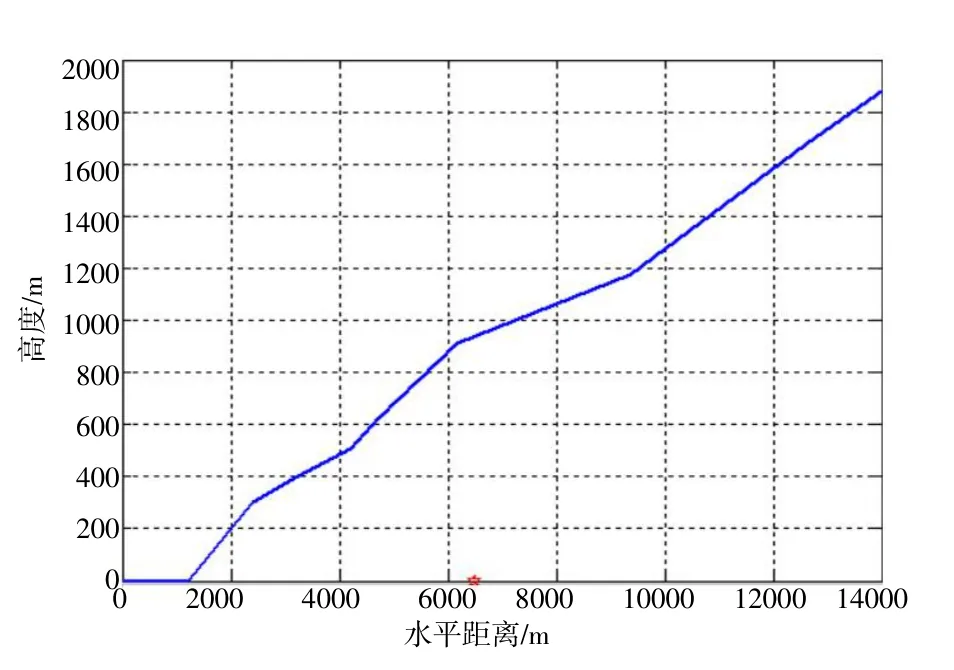
图3 起飞实际航迹
2.2 发动机噪声值预测
NASA 提出了飞机噪声预测计划ANOPP,具有独立的飞机系统噪声预测能力。ANOPP 中实施的预测方法被开发为经验或半经验模型,使用可用的实验数据和声学预测方法以及能准确预测当前以及未来新概念飞机的推进系统噪声。
发动机主要噪声源部件的预测模型:风扇Heidmann 模型[8]、燃烧室SAE 模型[9]、涡轮Smith&Bushell模型[10]、喷流Stone 模型[11]。MATLAB 软件开发相关程序分别计算各噪声源部件的远场无量纲均方声压,以风扇Heidmann 模型为例,噪声计算得到的50 ~10000 Hz 范围内的24 个中心频率远场无量纲均方声压表达式为:
其余噪声源部件一样通过编程设计得到远场无量纲均方声压值,在经过一系列声压值叠加便可得到整台发动机静态声压值测量图4 所示以及预测的发动机静态声压值见表1。
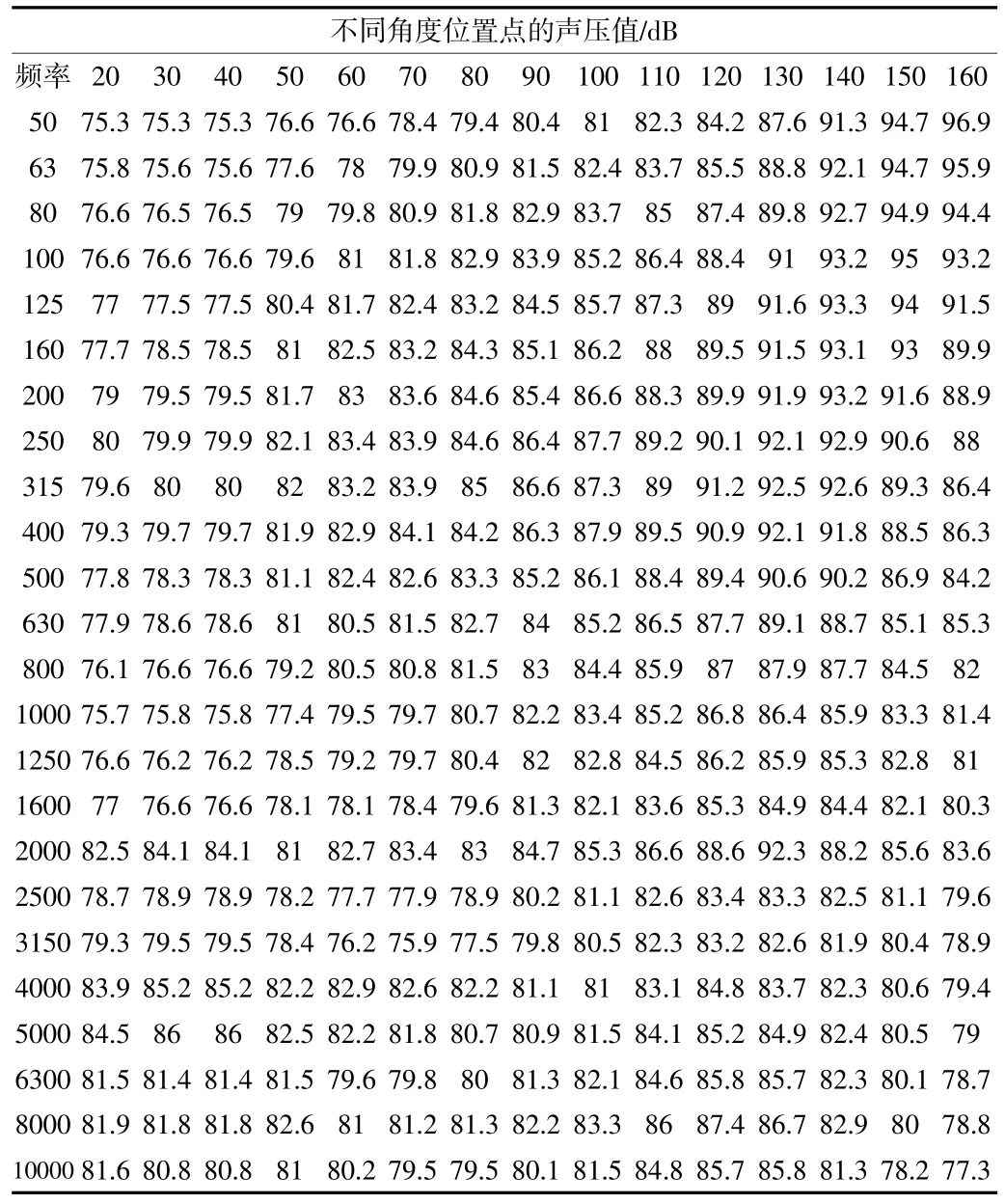
表1 发动机静态声压级预测值

图4 发动机静态噪声测量麦克风摆放位置
2.3 动态发动机噪声值测量
实际航迹和发动机声压值结合在一起,计算得出航迹上每点50 ~10000 Hz 范围内的24 个中心频率所对应得噪声值。但噪声适航审定是在基准航迹,所以需要将实际航迹测得噪声值数据修正到基准航迹条件下。修正如图5 所示。

图5 航迹点修正示意
其中K表示噪声测量点,其中EF代表测量的实际航迹,ECFC表示相应的基准航迹;实际航迹Q点对应修正航迹上的QC点;θ表示航迹和噪声传播轨迹的夹角,且角度值相同。以Q为例做噪声值的修正。
SPL(i)C=SPL(i)+ 0.01[α(i)-α(i)0]KQ+0.01α(i)0(KQ -KQC)+ 20log(KQ/KQC)
经上述计算为表示更加直观,从航迹上取飞机的声传播路径(即航迹上的某点到噪声测量点的连线)与发动机轴线的夹角(极化指向角θ)每隔5°从15°取值到170°一共32 个航迹点,航迹上的位置序号点如图6 所示。以及航迹点位置整体位置如图7 所示。
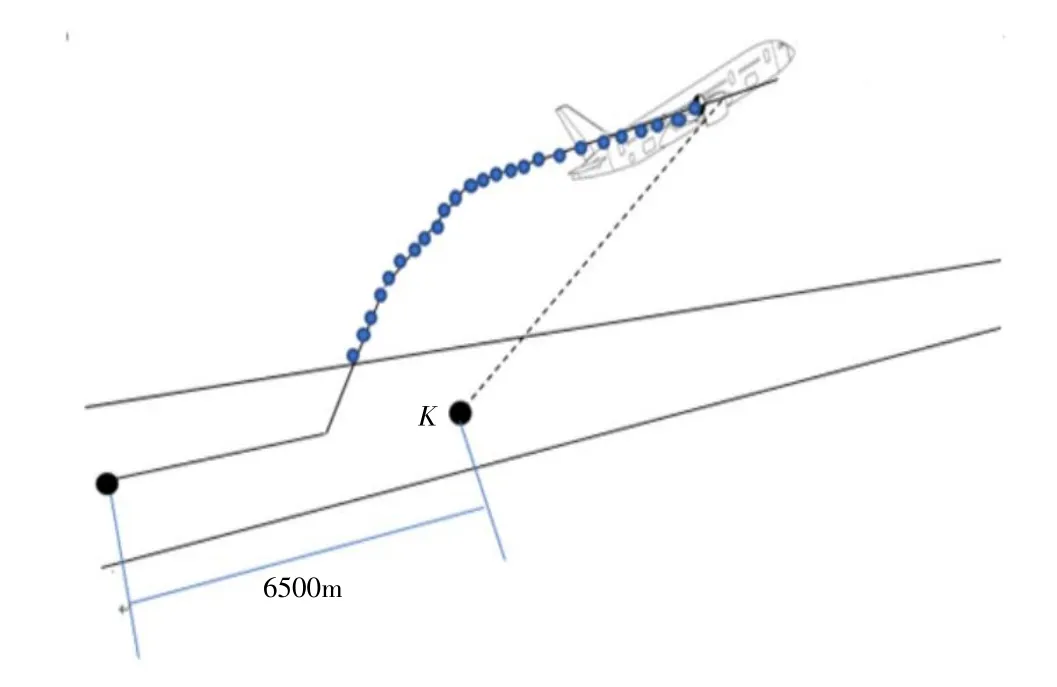
图6 航迹点修正示意

图7 航迹点位置整体
在飞机动态飞行过程中,不同θ对应不同的航迹点,所以航迹程序的推移代表着极化指向角的变化,航迹点到噪声测量点的距离也会变化。经编程得到航空发动机分别在32 个航迹点处各自对应的24 个1/3倍频程中心频率的噪声值声压级云图如图8 所示。

图8 发动机声压值云
3 预测结果与验证
3.1 切入点与离开点位置
航迹上所有点的数据并非都是噪声测量点需要的有效数据,需要将声压值SPL 换算为A 计权声压值以及某点24 个1/3 倍频程中心频率的总声压级OASPL[12]值。按照CCAR-36 部要求的计算步骤与换算方法编制程序,经程序处理以后得到不同航迹点的发动机纯音修正感觉噪声级PNLT,而最大纯音修正感觉噪声级PNLTM 值可以确定10 分贝降区间的起始点A 和终止点B。如图9 所示。

图9 PNLT-航迹点序号
适航规章要求每隔0.5 s 取一个航迹点,而按照航迹序号点取值,即AB之间的时间段不一定是0.5 s的整数倍。
设航迹点到噪声测量点的传播路径与水平面的夹角为θ,则计算结果为切入点θ1= 37.2°和离开点为θ2= 143.8°。即在C点切入飞行在F点离开,飞行员按照如下示意图10 中所示的黑线表示得飞行航迹进行飞行,循环六次以上并采集所需数据即可。

图10 起飞阶段等效航迹示意
3.2 结果验证
上述得到了等效试验起飞航迹的切入点和离开点位置,需要验证两点位置的有效性。截取起飞航迹CF 段范围内噪声值数据计算适航规章要求的有效感觉噪声值与NASA 官方的原始测量数据结果是否相吻合,便可验证其两点位置的准确性和有效性。
NASA[13]官方给出该机型适航起飞转状态下有效感觉噪声级值为88.6 NdB。按照模型预测计算出的切入点和离开点截取CF 段噪声数据进行计算得出有效感觉噪声值为86.9 NdB,其相对误差为1.98%。产生误差的原因是利用发动机噪声模型计算出的噪声值当作整机噪声来计算,且误差未超过3 dB。这说明该等效试验方法可以为适航中心所采用。
4 结论
本研究得到如下结论:
(1)飞机在起飞航迹10 dB 降区间切入点前进入实际航迹在10 dB 降区间离开点后离开实际航迹,获取数据经过航迹修正。此等效试验方法得到两位置点之间的噪声值可被适航中心采用。
(2)等效试验方法是适航规章认定的一种审定方法,此方法保证了数据的有效性又降低了试验成本提高工作效率。
(3)对于衍生机型的适航具积极借鉴意义。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
航空学报(2022年5期)2022-07-04
模具制造(2019年10期)2020-01-06
青年歌声(2019年12期)2019-12-17
自动化与仪表(2019年2期)2019-03-06
数字通信世界(2019年1期)2019-02-14
汽车工程(2018年12期)2019-01-29
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
电测与仪表(2016年9期)2016-04-12