
基于改进SSD 的建筑工程施工现场危险行为识别
2024-04-11 07:14张守甲
中国建筑装饰装修 2024年6期
张守甲
为了保障施工安全,对施工现场的危险行为进行实时监测和识别至关重要。近年,计算机视觉技术在此领域的应用逐渐受到研究者的关注,其中目标检测算法是关键技术之一。传统的目标检测算法,如Faster R-CNN、YOLO 等,在识别建筑工程施工现场危险行为时面临背景复杂、目标多样、尺度变化大等挑战,检测效果不佳。单次多框检测器(Single Shot MultiBox Detector,SSD)[1]具有较高的检测精度和速度,但在处理小目标及密集分布的目标时仍存在不足。笔者根据施工现场的特性,对SSD 算法进行改进,包括增加特征层次、优化默认框设置、引入非极大值抑制等,以对建筑工程施工现场危险行为进行识别。通过试验验证,改进后的算法在建筑工程施工现场危险行为的识别中准确率和实时性更高。本研究的目的是为建筑施工现场的安全监控提供技术支持,以实现自动识别危险行为并及时预警,降低施工现场的事故风险。
1 提取建筑工程施工现场危险行为
设置建筑工程施工现场危险行为特征子集为Null 集合,这个操作有添加和删除2 个选项。使用Wrapper 进行特征抽取。假设Gaussian 贝叶斯分类器[2]当前状态(特征子集)的分类准确度为立即受益,此时可完成建筑工程施工现场危险行为提取。
提取建筑工程施工现场危险行为的步骤如下:第1,将建筑工程施工现场危险行为图像进行标准化、离散化等预处理,得到训练样本。第2,计算各个施工现场危险行为特征的信息熵与信息熵均值,把施工现场危险行为特征信息熵大于信息熵均值的特征标记在信息熵表中。第3,计算各施工现场危险行为特征的Pearson 系数和Pearson 系数平均值,用Pearson 表对施工现场危险行为进行统计分析。第4,将训练数据与Pearson 表、信息熵表[3]一起输入Agent 中,Agent根据具有附加和剔除特性的施工现场危险行为的差别利益来判定。第5,Agent 经过一段时间的训练之后,可以得到Q表。在对Q表进行分析后按R环排列,提取施工现场危险行为特征子集。
按照上述5 个步骤,设定建筑工程施工现场危险行为数据集为:
式中:Y为施工现场危险行为数据集函数;(Yj)M×E为M个建筑工程施工现场危险行为和E个样本特征。
建筑工程施工现场危险行为样本的种类参量为:
式中:D为建筑工程施工现场危险行为样本数量;dj为施工现场j的危险行为样本。
设定施工现场危险行为样本数据集为(D1,D2,…,DM)T,那么建筑工程施工现场危险行为特征集可用(g1,g2,…,gE)表示,其中g∈M。
将现有建筑工程施工现场危险行为特征集输入改进的SSD 算法中,输出最优施工现场危险行为特性子集的过程为:
1)初始化施工现场危险行为特征子集H=φ,将备选特征集合T设为T=(g1,g2,…,gE)。
2)通过对个体行为特征进行统计分析,得到个体信息熵度与信息熵度平均值,并用Pearson 表对其进行统计分析。
3)通过分析不同因素之间Pearson系数和Pearson 系数平均值,将其大于平均值的数据加入Pearson 表中。
4)若H=φ,任意加入一个施工现场危险行为特征W,W∈T。
5)从T中选择一处建筑工地的特点W,计算特征子集的正确率,并将其设为SW。找出当前工地危害行为特征子区集H中特征之间相关性最大的特点,在特征库中随机选择一个特性V,计算出施工现场危害行为特征子集H/{V}的分类准确率,并将其设定为SV,将SW与SV中值最大的施工现场危险行为设成决策[4],则有:
式中:f为性能转换因子。
根据以上危险行为的决策结果,计算Q值,刷新Q表格。
6)判断是否满足终止条件,若满足则终止,并根据Q表格中最大的Q值输出所对应的子集;如果没有,则进入第4)步。通过以上6 个步骤,可以得到建筑工程施工现场危险行为特征。
2 危险行为极坐标变换
为确保危险行为坐标的一致性,必须将各危险行为特性进行坐标转换。可以用笛卡尔[5]坐标(x,y),在一张建筑工地危害行为图片中,对所有行为特性的像素坐标进行描述,还可以用极坐标(r,θ)加以说明,则r和θ为:
式中:(x0,y0)为坐标原点,假定其为(0,0),可以用一个复数z来表示:
假 设:w=l nz=f1(r,θ) +i f2(r,θ) = l nr+iθ,则卡尔坐标可由式(7)转换为对数极坐标的变换方程式:
在笛卡尔坐标系下,若与坐标原点相比,有缩放和旋转现象,则其极坐标(r,θ)可表示为(r+r0,θ+θ0),其对数极坐标(u,v)将转换成u=lnr+lnr0,v=θ+θ0。在笛卡尔坐标系下,相对于对数极坐标,施工现场危险行为影像变化仅仅是在水平和竖直2 个方向上的平动,并具有对数极化坐标的缩放和转动不变性。
3 建立危险行为识别模型
围绕获取的施工现场危险行为特征和危险行为极坐标变换,构建危险行为识别模型。
笔者将影像中的危险行为作为辨识目标。在辨识危险行为之前,必须先撷取出危险行为的轮廓。在此基础上,以影像中的横向为X轴、竖向为Y轴,将人体为圆心的坐标设为(x0,y0),则外形等高线的某一点(xb,yb)可以从该点到该中心点的距离来计算该坐标位置,因此,在建筑工地上进行危险行为时比较容易判定人体的姿势,计算公式为:

设定建筑工程施工现场危险行为模型Bj相应的第i个施工现场行为特征是Bji。设置不同类型的工地危害行为资料,并进行相应的行为表征。对于所获得的Bji的分布式特性,需去除冗余特性,详细公式为:
式中:r为Bji的样本数目,xji、yji为施工现场危险行为特征分布范围。

利用方差变量对不同行为的特征量进行统一,并对其进行规范化处理,从而获得高精度的差别行为。
把建筑工程施工现场危险行为特征集合G={B1,B2,B3,B4}设定为待辨识对象,并且按照顺序辨识G,将标准危害行为模型Bj进行比较,可以得到Bj(G),即:
选取Bj(G)中的最高值,则有:
因为模糊子集B1、B2、B3、B4只属于域内O的一个子集,因此,为提高识别结果的准确性,根据实际的危险行为建设现场值来测试,设定从属度门限值θ。如果Bj(G)超过从属度门限值θ,那么存在第j类施工现场危险行为;如果Bj(G)低于从属度门限值θ,那么施工现场不存在危险行为。
4 基于改进的SSD 识别人与危险源空间位置关系
识别人与危险源常用的方法是目标检测算法,即通过训练一种能自动识别图像中物体的模型,检测出图像中的人和危险源。目前,常用的目标检测算法是SSD。SSD 是一种单次多框检测器,能够在单一的神经网络中完成物体检测任务。为了提高检测的准确性,可以对SSD 进行改进,例如使用更深的卷积神经网络,例如VGG16、ResNet 等,来增加训练数据的多样性[7]。
一旦准确检测出人和危险源在图像中的位置,就要确定他们之间的空

除了人和危险源之间的距离,还可以进一步分析他们的相对位置。例如,如果人的位置在危险源的正下方或者正前方,可以认为他们之间存在某种特定的空间关系。这种关系的判断可以通过编写规则或者使用机器学习算法来实现。
通过上述方法,可以有效识别出建筑工程施工现场中人与危险源之间的空间位置关系。这不仅有助于及时发现潜在的安全隐患,而且可以为管理者提供决策支持,如优化施工布局、调整安全措施等。
5 试验检测
5.1 试验准备
结合建设项目实例,收集了近年来在本地同类项目中发生的各种危害行为的安全事故报道,并对事故报道进行分类和编号。抽取有关细节,创建CSV 文件,并将CSV 文件输入数据库中。试验所需的仪器设备参数如表1 所示。
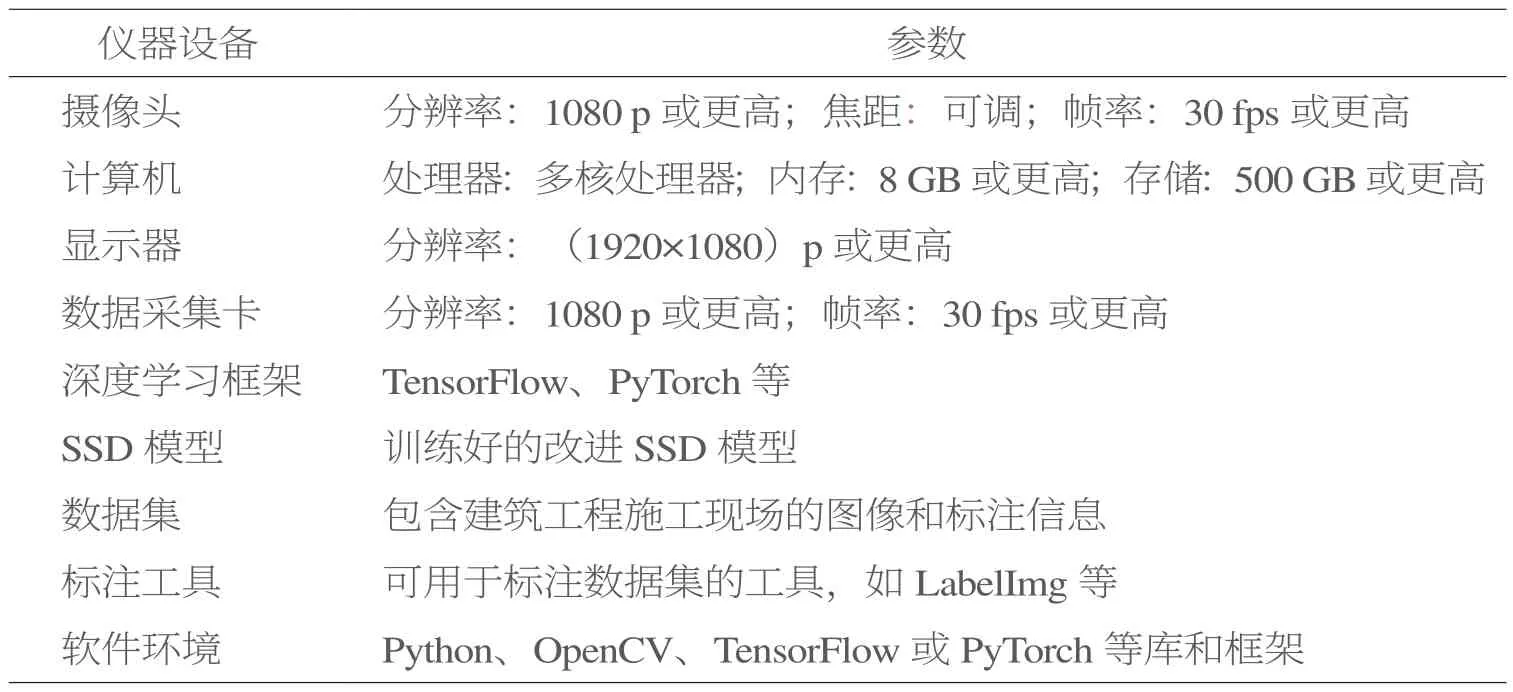
表1 仪器设备参数
5.2 试验结果
以工程建设全过程50 个星期的工地危害行为作为试验数据,选取其中任意6 周数据以及两种已有的危险行为识别方法与文中设计方法进行对比。将文献[2]中提出的基于改进OpenPose算法的矿工危险行为识别研究记为方法1,将文献[6]中提出的基于强化学习的建筑工程施工现场危险行为识别方法记为方法2。通过试验对比,得到不同方法下危险行为识别成功次数,结果如表2 所示。由表可知,在连续6 周的试验中,本文设计的方法对危险行为识别成功的次数均高于方法1和方法2。本文方法的平均识别成功次数为18.3 次,而方法1 和方法2 的平均识别成功次数均为13 次。由此可以看出,本文设计的改进后的SSD 建筑工程施工现场危险行为识别方法,在危险行为识别方面具有更高的准确性和可靠性,能有效识别施工现场的危险行为,为预防和应对安全事故提供有力支持。

表2 危险行为识别成功次数
6 结语
基于改进SSD 的建筑工程施工现场危险行为识别技术,不仅提高了危险行为的识别率,而且对非危险行为的误报率也有所降低。这项技术不仅增强了施工现场的安全性,也为企业提供了有力的数据支持,帮助管理者做出更准确的决策。然而,技术的进步永无止境,未来还需要进一步研究更高效、更精确的危险行为识别方法,以应对更为复杂多变的施工现场环境。期待更多的技术创新为建筑工程安全保驾护航。
猜你喜欢
语数外学习·高中版下旬(2023年7期)2023-09-25
军民两用技术与产品(2022年1期)2022-06-01
安庆师范大学学报(自然科学版)(2021年1期)2021-11-28
河北理科教学研究(2020年1期)2020-07-24
南京大学学报(数学半年刊)(2020年1期)2020-03-19
中学数学研究(广东)(2018年23期)2018-03-05
电子测试(2017年12期)2017-12-18
雷达学报(2017年6期)2017-03-26
池州学院学报(2015年3期)2016-01-05
都市丽人(2015年4期)2015-03-20
