钢混组合梁斜拉平衡体系顶推施工测控技术
2024-04-12 09:01吴桐WUTong孙仔明SUNZiming
价值工程 2024年8期
吴桐WU Tong;孙仔明SUN Zi-ming
(中铁大桥局第七工程有限公司,武汉 430050)
0 引言
钢-混组合梁结合了钢材和混凝土的优势,因此具有自重轻、强度高、耐久性好等优点[1]。钢梁可在工厂预制,实现装配化快速施工,在城市桥梁领域得到广泛应用,也是推广工艺之一。在我国斜拉桥由于跨越能力大,广泛应用于桥梁建设中,斜拉桥上部结构双悬臂施工时,采用斜拉平衡结构体系可以代替传统的临时支墩来抵抗不平衡荷载[2]。顶推施工技术具有安全、快速、干扰小的优点,在桥梁上部结构施工时应用较为广泛[3]。将斜拉平衡体系和钢-混组合梁顶推施工相结合可以很好解决常规的顶推法进行变高截面钢箱梁跨越施工时,大悬臂主梁刚度小、变形大的问题[4],此方法在我国为首次应用。在钢-混组合梁架设施工中,由于钢梁顶面宽度窄,高空测量风险极高,需要实现无接触式测量,而常规反射片又无法满足高精度控制要求;在支架搭设、钢梁及塔架安装、顶推施工过程中要使用不同的坐标系统,测量流程繁琐,钢梁线形监测数据对比困难。本文以白沙洲大道快速化改造工程项目为背景,提出使用磁力棱镜[5]代替反射片进行全过程无接触式测量。参考国内类似桥梁中塔梁同步施工测量、钢梁安装等施工经验[6,7,8],通过优化坐标系统来解决顶推施工中数据对比繁琐、无法直观进行表达的难题。
1 工程概况
白沙洲大道快速化改造工程位于武汉市洪山区青菱地区,其中高架约2459.66m。主线桥第九联跨三环线为38m+61.5m+38m 变高截面钢-混组合梁,57°斜交上跨武汉三环线。本联工字钢梁腹板高度由梁端的1.7m 采用圆曲线变化至中横梁处的3.7m,再由圆曲线变化至中跨跨中为2.1m。钢-混组合梁结构示意见图1。

图1 第9 联钢混组合梁结构示意图
本项目跨线施工采用工字钢梁分节段异位吊装、双向顶推施工方案,在边跨搭设两孔支架,满足边跨及中跨的一半的钢梁在支架上进行拼装。在主梁BZ29#、BZ30#墩墩顶设置塔架,如图2 所示采用“塔架+斜拉索”方式对跨中悬臂部分进行斜拉,保证跨中钢梁合龙口的无应力状态,确保钢-混组合梁的成桥线型质量。

图2 斜拉平衡体系结构示意图
2 钢混组合梁斜拉平衡体系顶推施工测量控制流程
根据第九联钢梁顶推施工专项方案,对过程中测量控制流程进行梳理,测量控制流程如图3 所示。

图3 斜拉平衡体系顶推施工测量控制流程图
3 钢混组合梁斜拉平衡体系顶推施工主要测量控制方法
3.1 建立加密控制网
在三环周边匝道上埋设地标点,地标点使用GPS 静态测量及水准测量与主网相连接;在现有三环线主桥及匝道桥墩柱顶部黏贴磁力棱镜作为支架施工及钢梁架设控制点,采用精密导线及三角高程的方式观测地标点对加密点进行复核。
3.2 建立顶推坐标系统
3.2.1 坐标系统建立
钢梁及塔架在顶推过程中是沿滑道梁成直线顶进,顶推时方位角保持不变,顶推行进距离为27.98m。在顶推过程中,钢梁及塔架相对位置关系保持不变。鉴于此情况,我们可以以顶推方向为坐标纵轴(X 轴)方向,中横梁线路中心点为坐标原点,垂直于顶推方向指向坐标系右侧的为横轴(Y 轴),钢梁及塔架在此坐标系进行顶推时,仅坐标纵轴X 值发生变化,横轴Y 值理论上保持不变。由于是双向顶推施工,在建立顶推坐标系统时,以三环线大小里程1~6 节段及7~12 节段分别建立顶推坐标系统,顶推方位角相差180°。此坐标系统可以在顶推施工中全过程进行使用,在使用前要进行坐标系统转换。
3.2.2 坐标系统转换
坐标转换前,根据拼装及顶推支架设计图纸、钢梁平面布图及主梁分段图计算支架及滑道梁、各节段钢梁端点在大地坐标系中平面位置坐标[9]。在根据坐标转换公式求得拼装及顶推支架、钢梁在顶推坐标系统中各点位坐标。此时计算坐标为顶推后钢梁成桥状态下设计坐标,如果需要计算顶推前钢梁拼装坐标,仅需将各点位坐标X 值减去顶推距离27.98m 即可。
钢梁高程计算时,根据钢梁分段里程,首先计算各里程位置桥面设计标高,在考虑各结构层厚度及横坡分别计算各节段钢梁梁顶及梁底标高。为了满足顶推施工及设计要求,钢梁拼装时高程较设计值整体抬高20cm,最终计算结果见表1。
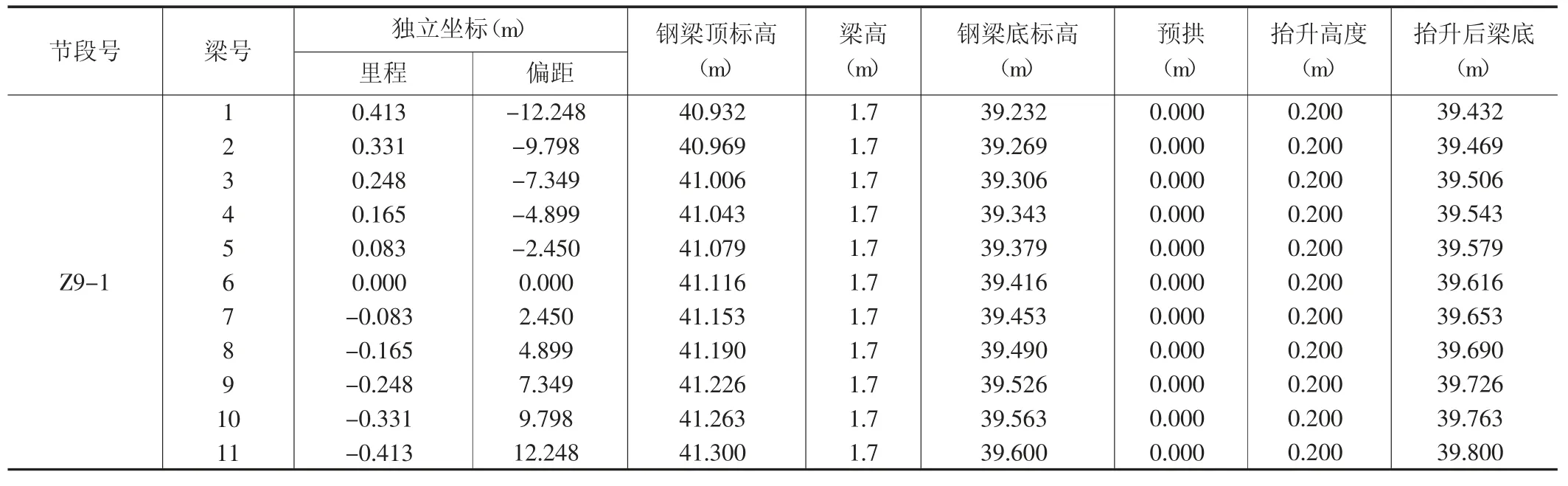
表1 钢梁架设坐标及高程计算一览表
3.3 钢梁架设测量
钢梁拼装前要对调节管位置进行放样,在放样调节管时,要实测分配梁顶高度,通过实测里程来反算此处梁底标高,再计算调节管高度,调节管高度在1~3m 范围内。梁底标高计算时要考虑预拱度、超高段、变截面梁高等影响。
钢梁吊装前,在地面上进行观测点布置,如图4 所示将磁力棱镜黏贴至钢梁腹板上下方,并量取磁力棱镜至钢梁顶板及底板距离,黏贴时保证磁力棱镜中心与腹板中心线一致。拼装时,使用顶推坐标系统,X 值控制钢梁纵向位置,Y 值控制钢梁轴线偏位,通过上下磁力棱镜Y 值差值,来确定钢梁垂直度,通过测量得到的实际高程+量取距离来确定梁顶(底)标高。
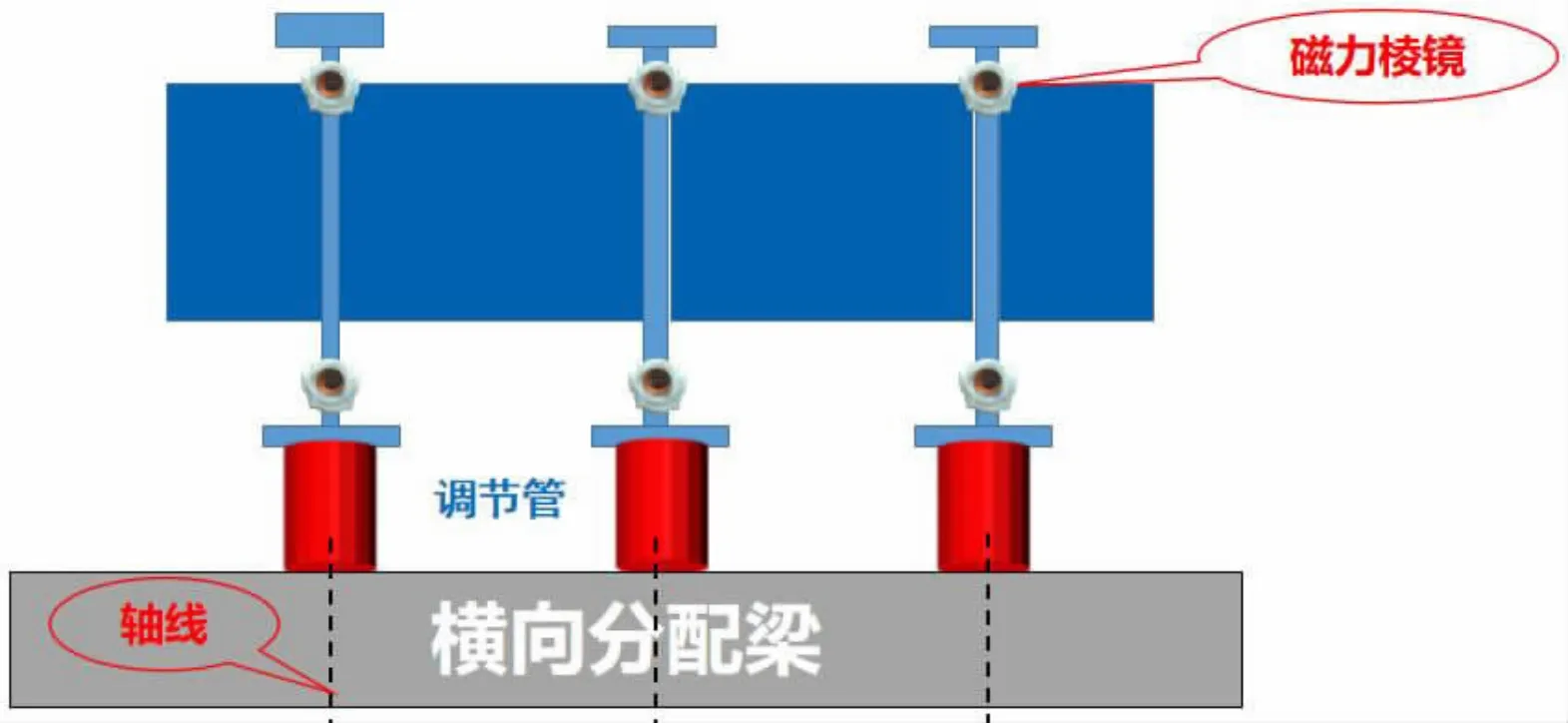
图4 钢梁拼装观测点布置示意图
中跨合龙段吊装定位,由于第九联顶推施工为无配切主动合龙,未设置合龙段,则第6 节段及7 节段合龙口拼装精度要进行严格控制。按照吊装顺序,先进行第6 节段钢梁吊装,吊装过程中主要控制6 节段钢梁合龙口里程、轴线偏位及高程偏差,在6 节段11 片钢梁吊装完成后,根据6 节段钢梁合龙口竣工数据,调整7 节段钢梁架梁数据,保证合龙口相对偏差<10mm。
后续梁段拼装时,在前段钢梁验收合格后,后段钢梁仅前端进行磁力棱镜黏贴,钢梁后端直接与已吊装好的梁段进行连接并焊接固定,前端则采用全站仪测量磁力棱镜来确定钢梁位置,在调整完毕后进行临时码板固定,并报第三方监控单位验收。在使用磁力棱镜及顶推坐标系统对钢梁安装测量进行控制后,钢梁安装平面位置及高程实测值均小于规范要求[10](平面位置±10mm,高程偏差±10mm)。
3.4 钢梁及塔架轴线及高程线形监测点布设及观测
在钢梁及塔架安装完毕后,通过拉索使钢梁及塔架形成斜拉平衡体系,在布置监测点时,为实现全过程无接触测量并保证监测点位置固定,监测点采用冲钉在钢梁顶面打上样冲点并将磁力棱镜黏贴在样充点上,然后使用油漆进行标记,如图5 所示监测点布置在每片钢梁节段连接处。塔架则在顶端及低端各布置一对监测点。

图5 钢梁及塔架监测点布置示意图
钢梁线形观测时,使用全站仪对监测点数据进行采集,此时观测坐标系为顶推坐标系统。在钢梁顶推施工中有以下工况需要进行监测:①钢梁整体拼装完成后,采集钢梁各监测点初始值;②调节管割除后,观测钢梁前后端及各节段下挠值是否复核设计要求;③钢梁顶推过程中,通过观测监测点反馈钢梁及塔架偏位情况;④钢梁顶推完成后,架设边跨合龙段,观测钢梁整体线形及位置偏差;⑤桥面板浇筑完成后进行体系转换,观测钢梁平面位置及高程是否满足设计要求。
3.5 钢混组合梁斜拉平衡体系顶推监测方法概述
钢梁及塔架在形成斜拉平衡体系后,理论上在顶推坐标系统中顶推时,钢梁及塔架相对位置及轴线偏位保持不变。由于顶推支架中滑道梁设计时在同一高程面上,则顶推时钢梁及塔架相对位置高程也保持不变。基于此情况下,顶推施工中,我们选择通过观测塔架两侧上下方监测点来反馈塔架的垂直度偏差;观测钢梁两侧前后端监测点来反馈钢梁变形状态。
钢梁及塔架同步顶推过程中,主要监测项目有钢梁行进距离、轴线偏位、高程偏位及塔架垂直度等,根据施工模拟,主要监测项目可通过监测点在顶推坐标系统中各顶推阶段差值(监测值-初始值)进行反馈。
3.5.1 钢梁行进距离反馈
在顶推过程中,顶推前进方向即顶推坐标系统纵轴方向,监测时,任意监测点X 值减去初始值差值即为顶推前进距离。例如钢梁前进1m 后,任意监测点X 值应较初始值增加1m。当左右侧监测点X 值差值不一致时,则表明两边顶推速率不一致,差值较大的那一侧顶推过快,应及时进行调整。
3.5.2 钢梁轴线位置反馈
在分析钢梁轴线偏位情况时,可针对钢梁左右侧及前后端各监测点X、Y 值变化进行同步对比。当左右侧顶推速率不一致时,会造成钢梁轴线出现扭转偏位,如果此时钢梁右侧顶推过快,钢梁前端会向左侧扭转,则右侧监测点X 值差值>左侧X 值差值,钢梁前端监测点Y 值差值为负,后端Y 值差值为正。当钢梁轴线出现整体偏位时,则左右侧X 差值相同,钢梁前后端Y 值则同为正(钢梁整体向右侧偏移)或同为负(钢梁整体向左侧偏移)。
3.5.3 钢梁高程偏差反馈
在顶推过程中,钢梁前端成悬臂状态,为防止钢梁前端出现倾覆,要对钢梁高程进行监测,监测时通过各监测点Z 值差值来进行反馈。当钢梁有倾覆风险时,此时钢梁前端Z 值差值为负,后端Z 值差值为正;此时还应同步对支架沉降观测数据进行对比,当各监测点Z 值差值同为负时,则支架可能出现沉降。当左右监测点Z 值差值一正一负时,钢梁向负值侧倾斜。
3.5.4 塔架监测
塔架监测主要方法同钢梁监测方法类似,通过观测塔架上下监测点X 值差值,则可以反馈出塔架垂直度状态,同时塔架垂直度变化可以与钢梁高差偏差变化进行同步对比。当钢梁有倾覆风险时,塔架垂直度也会向倾覆方向发生变化。
3.6 钢混组合梁顶推施工合龙测量
钢梁顶推至设计位置前20cm 后停止顶推,对6#节段、7#节段合龙口进行持续观测,主要观测钢梁高程、轴线与设计位置偏差及相对偏差。由于未设置合龙段,钢梁合龙口相对位置偏差应满足规范要求≤10mm。通过持续观测进行钢梁温度敏感度分析,选择夜间温度稳定时间进行合龙作业。合龙前,通过斜拉索及三向千斤顶对钢梁合龙口高程及轴线进行调整,直至满足要求后报第三方监控单位验收,验收合格后方可进行合龙作业。如表2 所示合龙精度满足设计及规范要求。

表2 钢混组合梁合龙后竣工统计表
4 结语
在钢混组合梁斜拉平衡体系顶推施工过程中,通过建立了以中横梁线路中心点为坐标原点,以顶推方向为纵轴方向的顶推坐标系统,简化了支架搭设及钢梁安装时测量指令传达,方便现场作业人员快速找准方向进行调节。在顶推坐标系统中,钢梁及塔架顶推前后横坐标保持不变,纵坐标变化则可以快速反应出钢梁前进距离,横坐标对比则可以反应钢梁轴线偏位,坐标数据对比过程简单、明了,通过监测点的持续观测,可以清晰的反馈出钢梁及塔架在各工况下线形变化情况。在使用磁力棱镜作为后视点及监测点后,实现了全过程无接触式测量定位,且磁力棱镜安拆方便,不破坏钢梁结构,较反射片精度也大为提高,全桥钢梁安装精度及合龙精度均符合设计及规范要求。钢混组合梁斜拉平衡体系顶推施工在我国也是首次应用,其测量控制方法可操作性强,测量控制精度高,能显著提高顶推施工过程中钢梁架设及过程监测测量效率,也可以为类似桥梁工程施工测量提供参考和借鉴。
猜你喜欢
军事文摘(2023年16期)2023-02-19
建材发展导向(2022年23期)2022-12-22
上海航天(2022年5期)2022-12-05
机械工业标准化与质量(2022年5期)2022-08-12
上海公路(2018年3期)2018-03-21
石油化工建设(2015年6期)2015-12-01
石油化工建设(2015年6期)2015-12-01
中央民族大学学报(自然科学版)(2015年1期)2015-06-11
黑龙江交通科技(2014年3期)2014-09-06
城市道桥与防洪(2014年1期)2014-02-27