基于C-V2X 的智能路侧单元系统设计
2024-04-12 09:01王宏善WANGHongshan贲伟BENWei丁维昊DINGWeihao
价值工程 2024年8期
王宏善WANG Hong-shan;贲伟BEN Wei;丁维昊DING Wei-hao
(南京莱斯网信技术研究院有限公司,南京 210014)
0 引言
C-V2X(Cellular V2X)技术是基于3GPP 全球统一标准的通信技术,主要应用在车路协同、车联网领域,包含C-V2X R14/R15(LTE-V2X)、C-V2X R16(5G-V2X)及后续演进版本[1,2],当前C-V2X 通信方案主要基于3GPP R14/R15 版本,在路侧部署路侧单元RSU(Road Side Unit),在车端安装车载单元OBU(On board Unit),通过CV2X 直连通信技术进行车-路、车-车信息交互,进行辅助驾驶、自动驾驶等车路协同场景应用[3]。路侧单元RSU 能够连接交通信号机等路侧智能交通基础设施、毫米波雷达等智能感知设备以及交通参与者,将路侧信息分析处理后上传到云端,同时将信息发送给车端,为智能网联车辆、自动驾驶车辆提供各类信息服务,是车路协同系统的路侧核心设备,是支撑车路协同技术应用的关键所在,因此,本文基于C-V2X 通信技术,设计了一种智能路侧单元。
1 系统总体设计
1.1 总体设计框图
为满足车路协同业务需求,基于C-V2X 技术的智能路侧单元RSU 需支持C-V2X 直连通信,支持5G 通信,支持硬件加解密,支持C-V2X 系列标准协议,支持POE 供电等,总体设计框图如图1 所示,总体分为硬件设计和软件设计两个部分。硬件设计包括应用处理器单元、C-V2X直连通信单元、5G 通信单元、安全加密处理单元、对外接口单元、供电单元的电路设计;软件设计包括板级驱动程序设计、BootLoader 适配、Linux 操作系统裁剪、C-V2X 协议栈软件设计、上层应用软件设计等。

图1 总体设计框图
1.2 系统功能
智能路侧单元RSU 功能组成如图2 所示。
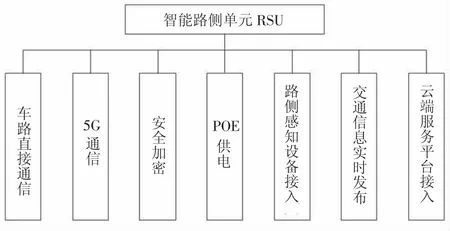
图2 功能组成框图
①提供C-V2X 车路直接通信功能,实现“车”与“路”直接通信,基于C-V2X R14 直连通信技术,中心频率为5.9GHz,不需要蜂窝网络的协助或覆盖,通过PC5 广播方式,实现车路直接通信,支持V2I(Vehicle to Infrastructure)等车路场景应用;
②提供5G 蜂窝通信功能,符合3GPP R15 标准,同时支持5G NSA 和SA 模式,并向下兼容4G/3G 通信,为与云端平台实时信息交互提供无线传输通道。
③提供安全加密功能,集成硬件加密芯片,满足CV2X 车联网安全证书管理系统技术要求,对通信报文提供签名/验签服务。
④支持POE(Power over Ethernet)供电功能,仅通过网线即可实现供网供电,不需要额外接电源线,便于室外安装使用。
⑤提供路侧端设备接入功能,能够支持毫米波雷达、激光雷达、摄像机等常用路侧端传感器数据接入功能,支持交通信号机等信控设备接入,为智能路侧感知和信息发布场景提供丰富的数据源。
⑥支持交通信息实时发布功能,对车辆数据和交通信息数据进行融合计算,将交通信号灯灯色时长信息、道路渠化信息、前方道路拥堵情况等交通状态实时呈现给用户,以实现超视距的交通信息提示和智能化的出行体验。
⑦预留云端平台通信接口,便于平台对智能路侧单元RSU 进行信息下发回传和运维管理,支持路网配置管理,满足车路协同系统C-V2X 应用业务的协同控制需求,具备与云端服务平台实时通信功能。
2 硬件设计
2.1 应用处理器单元
为满足智能路侧单元海量数据处理及边缘计算需求,应用处理器单元采用恩智浦IMX8M 处理器[4]。IMX8M 是一款基于ARMv8-A 架构的四核处理器,主频1.3GHz,并集成了ARM Cortex-M4 内核平台用于低功耗处理。存储电路采用DDR4 内存颗粒组成2GB 内存,采用8GB eMMC 存储芯片做为闪存。IMX8M 的高速高性能特点对PCB 布板带了一定难度和挑战,DDR4、PCIE Gen2、USB3.0等高速走线需注意阻抗匹配、差分线等长、网络走线上的过孔总数不超过2 个。DDR4 速率高达3200MT/s,需严格按照DDR4 信号完整性要求布板布线,保证电路参考地平面完整性、保持线距减少串扰。
2.2 C-V2X 直连通信单元
C-V2X 直连通信单元采用中信科智联的DMD3A 模组,支持3GPP R14 C-V2X PC5 直连通信,支持频段5905~5925MHz,工作带宽10MHz/20MHz。C-V2X 通信依赖于GNSS 输出的PP1S 和UTC 时间进行无线通信的同步,DMD3A 需要使用外部GNSS 模块进行时间同步,DMD3A 与GNSS 模块通过UART 接口进行数据交互,对波特率、数据格式有一定要求,因此设计上采用电子开关灵活配置的方式,由应用处理器对GNSS 模块进行参数配置。初次启动时,由电子开关选通GNSS 模块与应用处理器之间的UART 接口,GNSS 模块参数配置完毕后,电子开关选通GNSS 模块与DMD3A 之间的UART 接口,GNSS模块对DMD3A 提供授时服务。DMD3A 通过USB 接口与应用处理器单元进行C-V2X 数据交互。
2.3 5G 通信单元
5G 通信单元采用移远通信RM500Q 工规级通信模组,支持5G/4G/3G 通信,集成多星座GNSS 接收机,满足不同环境下的定位需求。RM500Q 通过USB 接口与应用处理器单元进行数据交互,RM500Q 的USB 接口最大数据传输速率可达10Gbps,可满足5G 通信大容量需求。RM500Q 具备2 个(U)SIM 接口,支持双卡单待功能,为保证(U)SIM 卡在使用中的可靠性,在布板布线时,(U)SIM 卡座需要尽量靠近RM500Q 模组放置,信号线布线远离射频线、功率电感等敏感信号源。考虑到插拔(U)SIM 卡可能会存在静电放电,需要在(U)SIM 卡座的引脚附近放置静电防护二极管。
2.4 安全加密处理单元
安全加密处理单元采用华大信安IS32U512B 高性能安全芯片。IS32U512B 提供高性能SM2 公钥算法引擎,支持SM2 密钥对生成、数字签名、签名验证、加密解密等运算[5],芯片集成多个ECC 内核,支持多任务并行处理,具备SPI 接收缓存,支持SM2 验签批处理模式,可满足C-V2X签名验签性能要求。IS32U512B 与应用处理器之前采用SPI 通信接口,通信时钟频率设置为20MHz。
2.5 对外接口单元
对外接口单元包括千兆以太网RJ45 接口、USB type A 接口、USB OTG 接口、RS485 接口、RS232 接口等。对外接口需要设计静电、浪涌防护电路,防止对设备造成损坏,特别是RJ45 网口,需要重点进行防雷电路设计,因为智能路侧单元通常安装于户外城市道路的杆件上,供电方式为POE 供电,从杆件上的抱杆箱取电取网,即从抱杆箱内的POE 交换机引出一根网线沿杆件连接到智能路侧单元,极易受到雷电影响。防雷电路采用气体放电管与瞬态抑制二极管(TVS)相结合的电路拓扑,如图3 所示,气体放电管位于RJ45 网口和网口变压器之间,用于消除共模雷击电压,TVS 位于以太网PHY 和网口变压器之间,用于消除差模雷击残压。
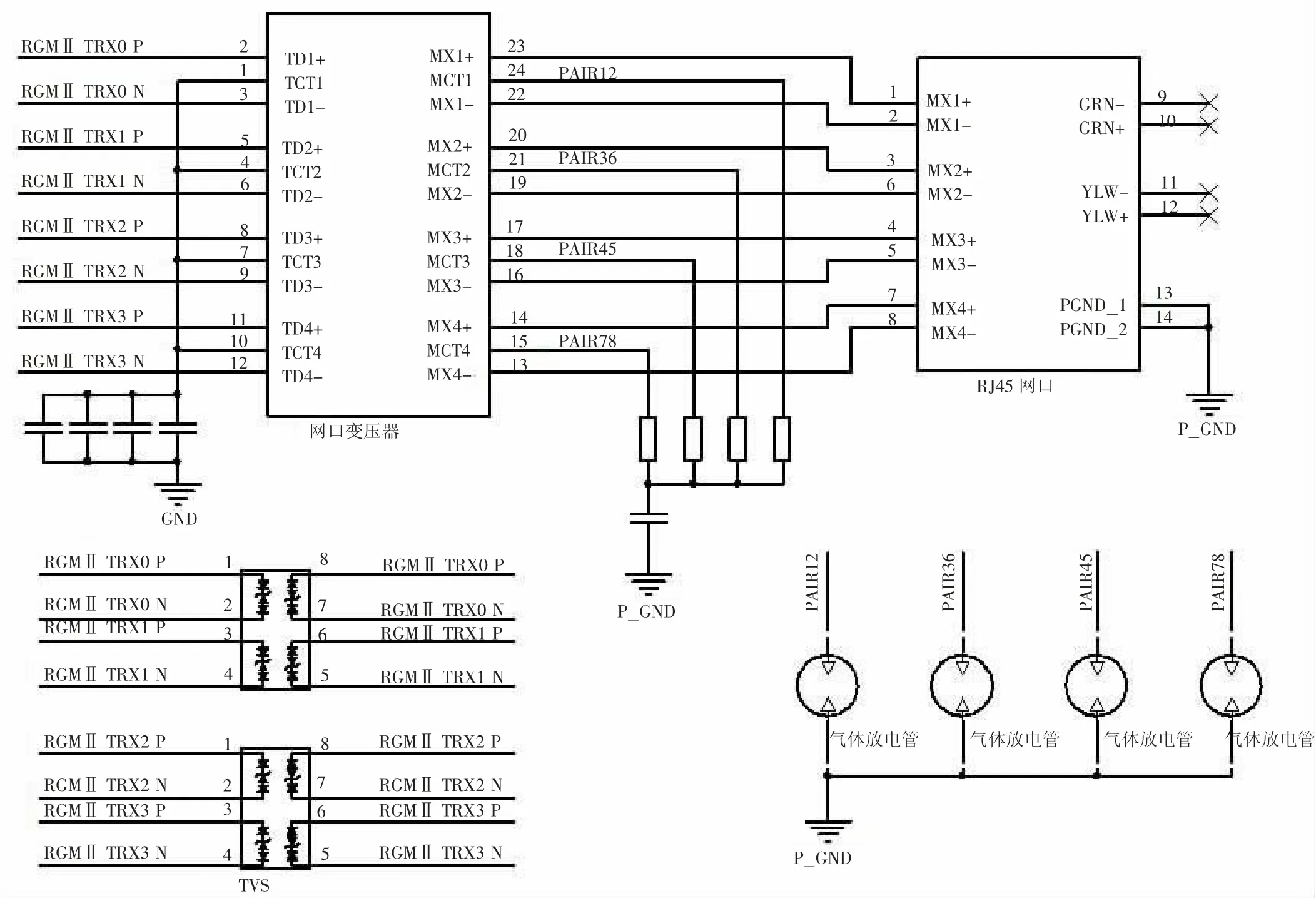
图3 千兆以太网防雷电路图
2.6 供电单元
供电单元包括POE 电路[6]、滤波电路、DC/DC 电路、过压过流保护电路等电路设计。POE 供电电路有2 种方案:一种是使用非隔离型Buck 电路,优点是电路实现简单、占电路板面积少,缺点是设备信号地与POE 电源地未隔离;第二种是使用隔离型的Flyback 反激变换器电路,优点是设备信号地与POE 电源地相互隔离,稳定性高,缺点是电路实现较为复杂、占电路板面积空间较多。本系统优先采用隔离型的Flyback 反激变换器电路。
DC/DC 电路设计主要是指DC/DC 电源设计,本系统电源电压种类多,需要用到12V、5V、4.2V、3.8V、3.3V、2.5V、1.8V、1.2V 等多个电源,且对电源的稳定要求高。为满足电源供给需求,高压差大电流电压转换电路采用Buck 开关电源电路拓扑,低压差小电流电压转换电路采用线性稳压电源电路拓扑。
开关电源纹波较大,电源滤波电路必不可少,滤波电路设计须保证电源纹波在50mV 以内。此外,在出现短路、浪涌等情况时,为保证系统稳定运行、不会发生起火等安全隐患,系统必须具备过压过流保护功能。
3 软件设计
系统的软件设计主要包括板级驱动软件设计、BootLoader 适配、Linux 操作系统裁剪、C-V2X 协议栈软件设计、上层应用软件设计等。系统使用Linux 操作系统,需要根据硬件接口设计进行Linux 相应驱动程序开发,涉及C-V2X 模组驱动、串口外设驱动、专用I/O 口驱动、千兆以太网PHY 驱动等,采用U-Boot(Universal Boot Loader)进行BootLoader 适配[7]。本系统需要实时处理和发布交通信息,对系统实时性要求较高,消息发布时延需控制在100毫秒以内,对此,需要对Linux 内核进行裁剪和修改,增强实时性。
C-V2X 协议栈包含ASN.1 编解码模块、专用短程通信短消息协议模块DSMP (Dedicated Short Message Protocol)、专用管理配置模块DME(Dedicated Management Entity)、Uu 通信协议模块等,具备通信报文的编解码、协议的封装与拆解、内部层级间的数据流转传递等功能,CV2X 协议栈架构如图4 所示。在进行协议栈软件设计时,代码需要高效简洁,支持高并发、低时延,具备高效的编解码能力,为上层应用提供丰富便捷的应用接口,便于在上层开发各类C-V2X 应用模块,支持各应用模块的高效运行。
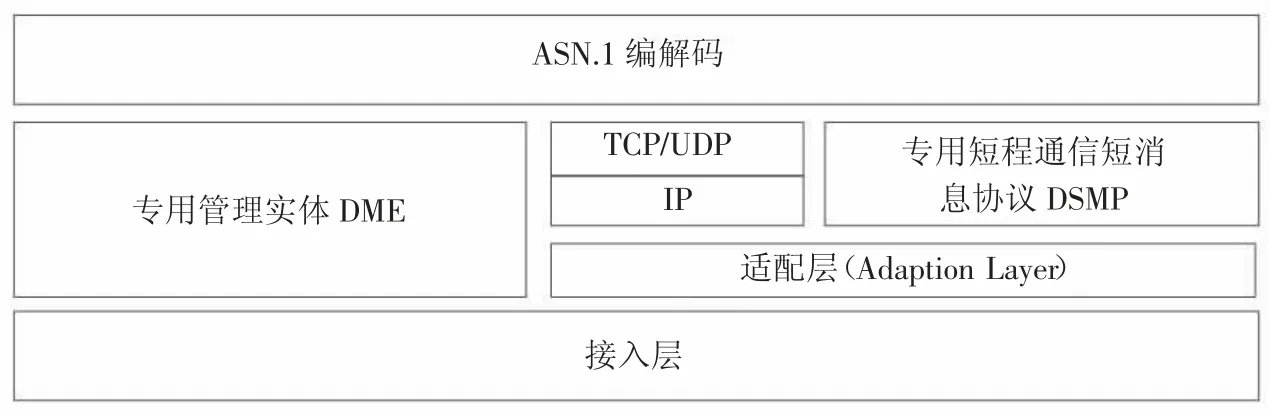
图4 C-V2X 协议栈架构图
应用程序设计包括路侧端传感器通信协议适配、多传感器信息融合算法设计、浮动车感知算法设计、车端信息交互、红绿灯信息发布、交通信号机报文解析等,应用程序在开发时需注意满足实时性要求,不能独占内核,需要支持局部路网与路侧信息静态配置,支持动态信息发布。
4 结束语
本文设计了一种基于C-V2X 的智能路侧单元,从系统总体设计、硬件设计、软件设计等方面阐述了智能路侧单元系统设计的全过程。目前多个城市正在积极推进车路协同场景应用建设,已建设多个国家级、省级先导区,智能路侧单元做为车路协同系统的路侧核心设备,有着广阔的应用空间。
猜你喜欢
中国电业与能源(2020年7期)2020-08-18
汽车观察(2019年2期)2019-03-15
中国交通信息化(2018年12期)2018-03-21
电子设计工程(2015年12期)2015-02-27
风能(2015年5期)2015-02-27
风能(2015年4期)2015-02-27
汽车零部件(2014年1期)2014-09-21
河南科技(2014年11期)2014-02-27
电子设计应用(2004年7期)2004-09-02