
无人机天钩回收航迹控制系统设计与实现*
2024-04-24 09:20张剑锋王朋飞
火力与指挥控制 2024年2期
张剑锋,王朋飞
(西安爱生技术集团有限公司,西安 710065)
0 引言
天钩回收型无人机因其无需跑道以及降落伞的优点而受到了极大关注,并有很多研究成果[1-2]。天钩回收无人机是靠翼尖处的钩子挂上捕获绳而实现回收的[3],由于在撞绳回收过程中的冲击力极大,因此,对于机翼撞击点以及所撞捕获绳的位置都有很高的要求,这就对回收过程中的高度与航迹控制提出了挑战,航迹控制精度根据飞机的翼展而有所不同,但一般都在1 ~2 m 以内。目前很多无人机的航迹控制主要采用PID 控制,以航迹偏差和航向角反馈作为控制量,高度控制通道则把高度与速度分开控制[4],这种方式在调节时间足够、气流平稳时能够达到较高精度,但并不适合天钩回收这种回收时间窗口很短的情况,存在撞绳成功率不高的问题,进而增加安全风险。一些文献也对现代控制方法在天钩回收中的应用进行了研究,例如文献[1]运用鲁棒伺服、自适应控制等控制方法提高了控制系统的鲁棒性。文献[5]采用线性自抗绕控制方法设计控制器,并通过粒子群优化算法得到控制器参数,相比传统PID 控制具有更好的抗干扰性能。这些研究多是以仿真分析为主,未见工程化实现与飞行验证的结果。
本文所介绍的控制系统采用优化L1 航迹控制的方法,具有更高的控制实时性,并对风干扰具有较强的鲁棒性。这种控制系统能大幅提高一次撞绳成功率,实现高精度的撞绳点控制以及姿态控制,既避免了因控制精度低导致频繁复飞带来的风险,也避免了撞绳时由于撞击点不够精确或速度过大导致的机翼损伤或使用寿命下降。该方法对于传感器的精度要求不高,且易于工程实现,可以直接应用到实际的飞行试验中。
1 方案设计
1.1 无人机天钩回收控制策略与流程
图1 为无人机天钩回收过程示意图。整个过程包括下滑、定高飞行、复飞决策、撞绳。由于撞绳高度比较低,一般在距离地面10 m 以下,为了保证安全,撞绳前的定高飞行距离很短,进而对控制精度及其动态特性提出了很大挑战。在定高飞行期间,无人机纵向控制律为俯仰角限制下的高度与速度解耦控制,横航向为优化L1 航迹控制。
天钩回收过程决策流程如图2 所示。当天钩回收无人机进入回收模态后,无人机从当前高度下滑到撞绳高度,并在此高度上对准预期撞绳点保持定高、航迹控制飞行。当飞行至距捕获绳一定距离的决策窗口时,自动判断高度偏差、速度偏差以及航迹偏差是否满足窗口要求,任意一个要素不满足窗口要求则退出撞绳回收模态,复飞后再次进入回收。如果无人机到达决策窗口时所有要素均满足窗口要求,则继续保持速度约束下的定高、航迹控制飞行,直到机翼撞到捕获绳。

图2 无人机天钩回收过程决策流程图Fig.2 Decision-making flow chart of of skyhook recovery process of UAV
1.2 控制系统组成与原理
控制系统组成框图如图3 所示。该控制系统包括的部件有:微航姿系统、卫星信号接收机、飞控计算机、副翼与方向舵机。
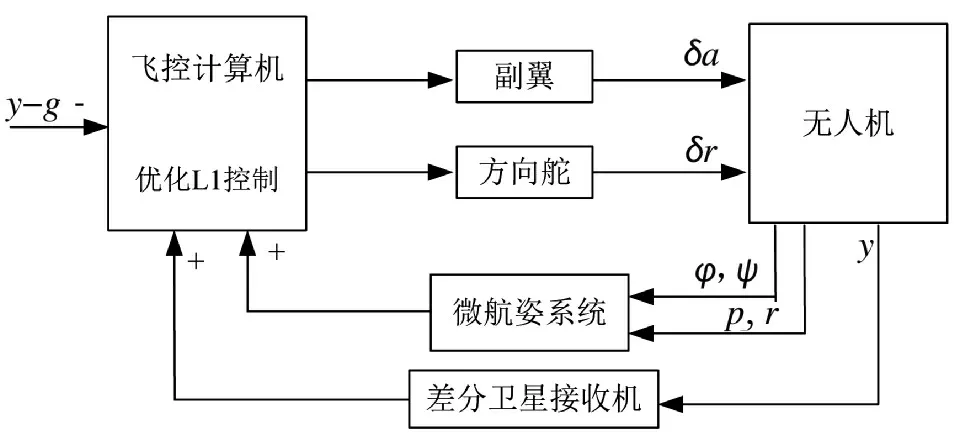
图3 天钩回收过程控制系统组成框图Fig.3 Control system composition block diagram of of skyhook recovery process of UAV
微航姿系统用于测量无人机的俯仰角、滚转角与航向角以及俯仰、滚转、航向角速率;卫星信号接收机用于获取无人机的高度、地速和位置信息;副翼与方向舵机用于执行横航向的控制指令,飞控计算机用于采集各个传感器的测量信息和指令信息,进行侧向速度等的解析以及控制律解算,并输出各个通道的控制量。在撞绳回收控制系统中,飞控计算机中实时运行控制律程序,将从各个传感器采集得到姿态角、角速率、位置,以及从预期指令得到的航迹指令输入控制律,解算出副翼、方向舵偏转角度,驱动相应的舵机运动,进而改变无人机的姿态与航迹,在有限的时间内把这些参数与预期值的偏差调整到要求范围内,最终成功实现撞绳回收。
航迹控制属于无人机的外回路控制,由副翼和方向舵协调完成。副翼是消除航迹偏差的主控制通道,方向舵通道主要用来改善航向稳定性和航向阻尼,当然其输入也包含了航迹偏差信号。在航迹控制回路中,航向角控制为其内回路,即:既要保证无人机的航迹在预期航线上,也要保证航向角与航线的航向一致。在有风干扰时,为了优先保证航迹,航向角会有一定的偏差。航迹控制过程可描述为:不失一般性,设无人机纵轴向左偏离预设航线,即出现负的航迹偏差、偏航角,经过控制律解算,副翼通道控制量为负,即副翼左下、右上偏转,产生正的滚转力矩,飞机右倾斜,升力的水平分量成为向右的侧力,使空速向量向右转动。与此同时,负的航迹偏差、偏航角信号使得方向舵控制量为负,方向舵右偏,产生右转的偏航力矩,使飞机趋向原航迹。角速度反馈用于增加阻尼,使得航迹修正过程平缓、侧滑角很小,最终航迹趋近原设定航线,航向趋近于原设定航向。以上阐述中涉及的舵面控制与力矩的正负定义参见文献[6]。
2 控制律设计
2.1 控制对象数学模型的建立
建立固定翼无人机的线性化方程[6],在设计好控制律并对参数进行初选后,再引入到六自由度非线性模型中进行验证[7],最终固化的控制参数应用到飞行试验中。
下面给出无人机的线性化方程。
上述线性化状态方程中,Δθ、Δq、ΔV、Δα、ΔH 分别为俯仰角、俯仰角速度、空速、迎角、高度;β、p、r、φ、ψ 分别为飞机的侧滑角、滚转角速度、偏航角速度、滚转角和偏航角;Δδe、Δδa、Δδr分别为升降舵偏角、副翼偏角和方向舵偏;状态矩阵和输入输出矩阵中的参数Ai和Bi为根据气动数据求出的各个系数。
上述系数矩阵的各参数为根据风洞试验数据插值的相应导数,系数矩阵的值随飞行状态的变化而变化,当状态确定时,这些系数均为确定值。
完成线性化设计的控制律需要在六自由度非线性模型中进行验证与控制参数选优,该六自由度非线性模型框图如下页图4 所示。

图4 无人机六自由度非线性模型框图Fig.4 Block diagram of 6-Degree of freedom nonlinear model of UAV
图4 中,无人机六自由度方程的输出为各飞行参数,这些飞行参数反馈到控制律模块进行解算,气动数据模块为风洞试验数据插值表,根据控制律解算得到的控制量与相应的飞行参数进行插值或计算,得到相应的气动力与力矩,与动力模块、环境模型的输出一起作为合力与合力矩,送至六自由度方程进行飞行参数的解算,如此就形成仿真验证闭环,以对控制律进行验证与参数优化。
2.2 航迹控制律设计
航迹控制采用优化L1 航迹控制方法。L1 航迹控制方法开始提出时多用在导弹控制中,后来根据不同的应用场景有相应的改进或简化[8-9]。L1 航迹控制的核心思想,是通过引入速度或加速度敏感项的反馈,使得无人机对外干扰产生初期所引起的速度矢量变化敏感,并进行相应的控制动作,以达到对干扰的快速抑制效果。
无人机航迹控制与导引原理如图5 所示,此处为了简化分析,选取无人机的初始速度和期望航迹近似平行,其他情况原理类似,只需要根据控制效果进行参数优化即可。

图5 航迹控制原理示意Fig.5 Schematic diagram of track control principle
图5 中,无人机的速度为V,L1为无人机到期望航线上参考航点的长度,该长度通过仿真确定后即为常数,随着无人机越来越靠近期望航线,L1不变,但参考航点会不断向前推移。无人机到参点的射线与无人机速度方向的夹角为η。
L1 控制中,所引入加速度敏感项的反馈可以加强控制律的抗干扰特性以及反应的快速性。同时,加速度指令acmd本身也包含了L1 与η,L1 的数值决定了无人机趋近于期望航线的控制强度,η 为L1 射线与无人机速度方向的夹角,相比使用无人机的航向角,其反应敏感性与对风干扰的抑制性都要好很多,这意味着这种控制的动态特性相比普通的比例控制要好得多。
基于以上分析,在常规航迹反馈控制中引入基于适合的侧向加速度指令的L1 控制器是关键[10-11]。副翼、方向舵通道的航迹反馈控制律可描述为:
其中,f(L1)=Kay×(ay-acmd)。
δa为副翼控制量,δr为方向舵控制量,Δy 为航迹偏差量,Δφ 为滚转角的偏差量,Δψ 为航向角的偏差量,p 为滚转角速度,r 为航向角速度。
ay为侧向加速度,acmd为侧向加速度指令,Ky、Kψ、Kr、Kay、Kp、Kφ分别为相应的控制系数,可根据仿真确定。该控制律公式中,Δy、Δψ、r、ay可根据传感器测量值,以及所设定的已知航迹与航向角指令得到,下面重点介绍优化L1 控制器的核心问题:侧向加速度指令acmd的计算。
由图5 中的几何关系可知:
无人机飞行过程中,参考点和η 是实时变化的。当无人机距离期望航迹很远时,靠近航迹的最佳方式是对准并垂直于期望航迹飞行,当飞行到距离期望航迹合适的距离时,为了得到较好的航迹跟踪动态特性,需要切换到优化L1 航迹控制器使无人机进入参考点引导控制方式。此时,无人机到期望航迹的垂直距离就是L1的长度,随着无人机不断靠近期望航迹,由无人机的位置和L1长度所决定的引导参考点不断沿着期望航迹向前推移。
由以上分析可知,L1的数值选择至关重要,太大则从过远距离开始向期望航迹调整,会使得控制过程很慢,太小又不利于航迹控制的平滑。传统的航迹控制中,为了跟踪航迹的平滑和尽可能小的超调控制,无人机在尚未到达目标航点或目标航线时需要提前进行转弯动作,这一刻无人机的位置距离目标航点或航线的距离称为提前转弯距离。一般来说,对于中低速无人机来说,较好的提前转弯距离为当前速度的5~8 倍,而L1的值即可设置为该距离,即:
式中,KvL1参考取值范围为5~8 之间,可根据控制效果进行优化选取。
下面计算η,由路径点A、B 计算路径方向:
计算向量AP 长度:
飞机朝期望航迹上的L1参考航点飞行,则有:
无人机的高度、经纬度等信息可由传感器测量得到,期望航迹的航向方向、A 点与B 点的高度、经纬度等数值都是已知的,因此,式中lAP、nAB均可实时计算得到,由此也就可求得n 的值。
以上控制律中,各控制参数的值由六自由度非线性仿真确定。本系统的取值为:Ky的取值范围为0.02~0.035,Kφ的取值范围为0.8~1.1,Kψ的取值范围为2.0~2.5,Kp的取值范围为0.1~0.2,Kr的取值范围为1~1.5,Kay的取值范围为0.3~0.6。
由于该控制器具有显著的非线性特征,使用传统的经典控制理论难以直接分析其幅值裕度、相位裕度等特征。但是在考虑使用滚转角产生横向加速的方法,在小角度条件下,侧向加速度acmd近似等价于航迹偏差量d 的二阶导数d¨。则上述给出的侧向加速度表达式可以等价描述为:
3 设计验证与分析
本文设计方法在某40 kg 无人机上进行了应用,在完成控制律设计与实现后,构建了半物理仿真系统并进行了综合仿真验证。无人机系统综合仿真能够把飞控系统、航电设备、地面站、飞行控制与导航算法等形成闭环进行仿真验证。得益于风洞试验数据,经综合仿真验证的程序可以直接应用于飞行试验。半物理仿真系统的开发与仿真方法比较成熟[12-19],不再赘述。下面仅给出仿真结果分析。
设置仿真初始条件为:飞行速度106 km/h,海拔高度1 500 m,初始航向90°,航线方向90°。并添加方向0°大小5 m/s 的常值风干扰。如图6 所示的仿真结果表明,使用本文所述方法进行航线跟踪有更快的收敛速度、更小的航迹偏差量、更强的抗风鲁棒性,效果显著优于普通PID 控制器。
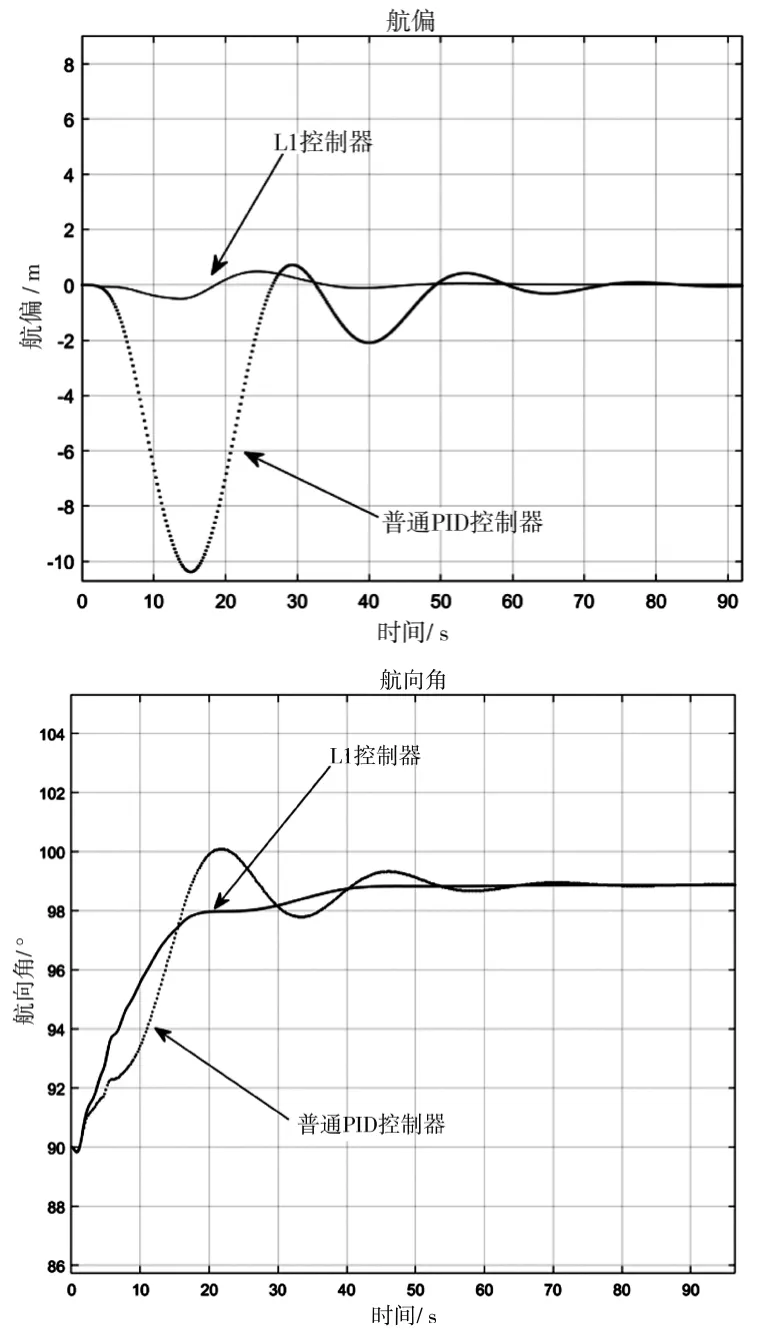
图6 航线跟踪效果对比图Fig.6 Comparision chart of track tracking effects
完成综合仿真后开展了实际的飞行试验测试,实际使用的天钩回收装置的捕获绳总长度约为16 m,安装在回收架上,回收架通过4 个液压支撑杆固定在地面。飞行前根据飞机的重量和撞击速度调节捕获绳的松紧程度,最佳撞击区域在捕获绳的中间段。
图7 为所用的天钩回收装置示意图,最佳撞绳区域为捕获绳中间长度为1 m 的AB 段,无人机天钩回收时若撞至该区域则无损伤风险。A、B 点各外延0.5 m 的区域为允许撞绳点,撞至该处存在机翼轻微损伤概率。其余区域为禁止撞绳点,撞击这些区域会造成机翼或机体损伤。
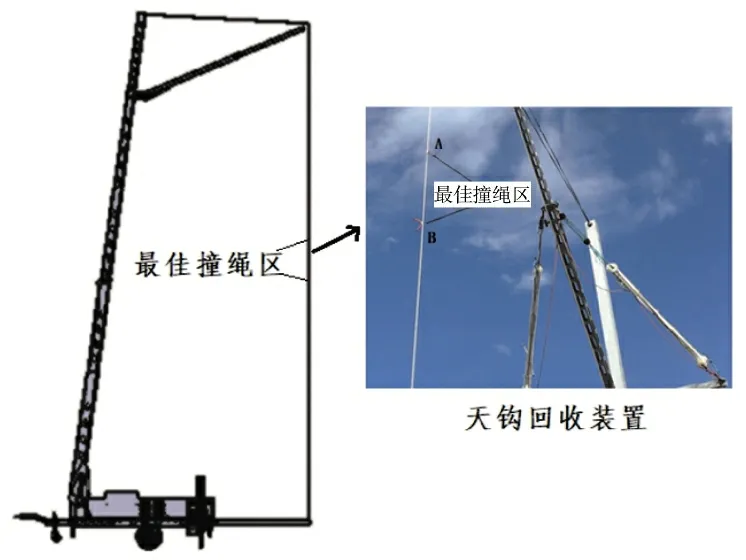
图7 天钩回收装置示意图Fig.7 Sketch map of skyhook recovery device
图8 为无人机可撞区域示意图,由图中可知,单边机翼的长度即为可撞区域长度,本文应用的无人机对象单边机翼长度为1.6 m,即航迹控制精度应在-0.8~0.8 m 之间。

图8 无人机可撞区域示意图Fig.8 Schematic diagram of collidable area of UAV
使用本文所设计的方法成功完成了多次天钩回收,在每次回收前都进行了多次模拟撞绳测试。图8 给出了3 次实际撞绳位置(星号)与10 次模拟撞绳位置(方框)分布图,纵轴为高度偏差,横轴为航迹偏差。模拟撞绳也是实飞数据,只不过在高于天钩30 m 处进入天钩回收程序,除了没有真正撞绳外,其他均与实际撞绳一致。
由图9 可知,所有撞绳点高度方向均在允许区域内。所有实际撞绳与模拟撞绳时的航迹均被控制在-0.8~0.8 m 之间,意味着机翼均可成功撞上捕获绳。

图9 撞绳位置分布图Fig.9 Distribution map of collision rope positions
选取其中一次数据,画出相应飞行参数曲线如图10 所示,试验时风速在3~5 m/s 之间,无人机在6 740 s 完成调整,进入撞绳窗口。
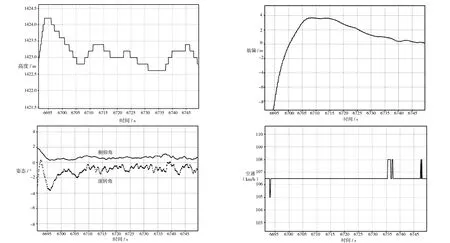
图10 撞绳时的相关参数反应曲线Fig.10 The response curve of the relevant parameters during rope collision
从图9 结果可知,无人机能够在控制律的作用下实现顺利回收,在完成调整进入撞绳窗口之后,各参数均保持在要求范围内。最佳撞绳中心的高度为海拔1 423 m,撞绳点位于最佳撞击区域内,撞绳时的航迹偏差为0.3 m,飞机姿态水平,俯仰角稳定在0.5°左右,滚转角稳定在-1°左右,速度稳定在106~108 km/h。
4 结论
针对某型固定翼天钩回收无人机提出了一种实用的天钩回收航迹控制方法,给出了总体方案设计、控制系统组成、控制律设计方法以及在某40 kg级无人机上的应用结果。从飞行试验结果可知,该控制律设计方法正确可行、兼具创新性与工程实现性,在普通精度的传感器条件下就能够实现天钩回收无人机的精确回收控制,相比传统PID 控制有更快的收敛速度、更小的航迹偏差与更强的抗风鲁棒性。该方法已在某型号无人机中使用,并可直接推广应用到其他无人机的航迹控制中。
猜你喜欢
装备环境工程(2022年7期)2022-08-10
智能制造(2021年4期)2021-11-04
新世纪智能(高一语文)(2021年3期)2021-07-16
民用飞机设计与研究(2021年1期)2021-04-06
机械设计与制造工程(2020年8期)2020-09-03
民用飞机设计与研究(2020年1期)2020-05-21
民用飞机设计与研究(2019年4期)2019-05-21
北京航空航天大学学报(2017年9期)2017-12-18
北京航空航天大学学报(2017年3期)2017-11-23
电子制作(2017年24期)2017-02-02
