
模糊积分决策级融合的空地协同目标识别研究
2024-04-24 09:20郭宇强陶思源郭俊文卢志刚李志伟
火力与指挥控制 2024年2期
郭宇强,陶思源,郭俊文,卢志刚,李志伟
(1.北方自动控制技术研究所,太原 030006;2.智能信息控制技术山西省重点实验室,太原 030006;3.中国航天空气动力技术研究院,北京 100074)
0 引言
在未来信息化、无人化战场环境下,首先要获取目标的准确信息,才能打赢信息化战斗。无人车、无人机的迅猛发展,并在地面侦察中得到广泛应用,成为无人化技术的发展趋势。在地面作战中获取地面目标信息将面临着复杂的地面环境,如边境区域可能存在山脉或盆地容易隐蔽的场所,在城市等复杂区域可能存在障碍物的遮挡,以及存在敌方假目标的诱骗,增大了作战侦察识别过程中环境背景的复杂度,导致获取到的目标信息不完整[1],甚至获取到错误信息,这些因素都阻碍了无人侦察装备效率的提升。无人车作为未来主要的作战装备,其续航能力强,对敌方目标可实施抵近侦察和精准的火力打击,但是在实际作战条件下,其光电侦察设备对周围环境的感知较为局限,对于特殊地形、未知环境的适应能力较差,仅有无人车很难满足对目标区域作战的需求。无人机具有大范围侦察能力、体积小、往返速度快,以及易于隐形的优点,但是其短板在于巡航时间短、负载能力弱,其光电侦察设备对于部分目标的识别效果不佳,导致准确性降低、虚警率较高。单独依靠无人车或无人机侦察获取到的目标信息不完整、不准确,无法满足未来信息化、无人化战争对地面目标信息获取的需求。
针对以上问题,国内外已经开展了大量研究工作,从文献[2-5]可以看出,采用无人车与无人机协同进行侦察搜索的模式,利用其各自的优势长处,共同对目标区域进行空地协同搜索侦察,不但可实现协同隐蔽侦察、协同火力侦察等侦察模式,还可以通过双方侦察信息的融合,充分发挥各自的信息特点,进行优势互补,通过信息的融合以获取更为全面、准确的目标信息,比起无人车或无人机单独进行侦察具有更大的优势。
针对空地协同侦察获取的不同目标识别准确率和虚警率差异大,目标类型、目标毁伤和威胁度等特征不同的问题给信息融合带来的困难,采用基于模糊积分改进的决策级融合方法,提高目标信息识别的准确性,降低了虚警率。
1 决策级信息融合方法分析
1.1 概述
随着科技的迅猛发展,探测侦察识别技术也得到了快速的发展。近年来,探测信息呈现显著增长趋势,采集到的信息也因为来源于不同的平台和传感器呈现出不同的特性,如果只是简单的信息叠加,会造成大量无用信息的增加和有用信息的淹没,因此,提出了信息融合的方式。信息融合由低到高分为3 个层次:像素级融合、特征级融合、决策级融合。本文针对无人车与无人机两种探测设备,探测目标信息的时间、空间、频谱等特征不同,使用像素级融合和特征级融合有较大难度,并且很多不重要的信息并不需要进行融合,因此,采用决策级融合的方法,通过无人车和无人机等探测设备对目标信息进行决策,再将得到的完善、准确的目标特征重要信息进行融合,大大降低了融合的难度。
因此,针对当前的战场形势,无人机与无人车在作战侦察过程中,机身与车身搭载的侦察装置,对敌方目标区域进行快速侦察识别,并且给出目标信息,将两类目标信息进行融合,有利于提高目标信息的准确度,降低虚警率,为下一步的指挥决策提供可靠依据。
1.2 决策级融合方法分析
进行决策级融合的算法有多种,有表决法、贝叶斯推理法、D-S 证据理论、以及模糊积分的方法。其中,表决法的基本理念是少数服从多数,最后得出的融合结果取决于目标识别信息的占比,一致性数量最多的信息即为最终结果,但是此方法没有考虑探测设备本身识别的准确率,以及实际使用探测设备的数量,如果在战场中由于探测设备对于某一目标的识别率较低,导致大部分识别结果都是错误的目标信息,经过表决法进行融合,得到错误的融合结果可能会影响下一步的决策,因此,本文不采用此方法。贝叶斯推理法是在已知概率的基础上,融合当前传感器的识别结果,然后更新对此目标类型的识别概率,但是在实际的应用场景中,如果无人机与无人车作出的决策不同,即识别到的同一目标类型不同,贝叶斯理论不具备处理这一问题的能力,因此,本文不采用此方法。D-S 证据理论是对贝叶斯理论的扩展与延伸,它的证据来源于各个传感器给出的结果,然后得出各个目标的可信度,最后利用Dempster 合并规则,将各个可信度合并成统一的结果,但是使用D-S 证据理论存在一个问题,即归一化过程可能会导致与直观看到目标信息相反的结果[7],并且其中一些重要的目标信息被略去,所以在改变参数的时候,可能只改变很小的一个值,会导致不同的结果。因此,本文也不采用D-S 证据理论作为方法研究。
本文中采用改进模糊积分的方法进行决策级融合,模糊积分方法源于模糊测度的提出,以及Choquet 积分方法的应用,在此基础上,提出改进Choquet 模糊积分的方法,针对空地协同获取的目标信息在不同环境因素下,存在不确定性和关联性,使用具体数值来表示具有很大局限性,因此,将模糊测度取值为一个连续的概率区间,同时模糊积分在黎曼积分的基础上,增加区间变量进行多层次积分,通过计算模糊积分值,并进行解模糊得出最终目标信息,可以提高目标融合结果的准确率。
模糊测度描述了各属性的重要程度[8],并且引入了模糊密度、关联参数的相关概念,其定义如下:
设X 表示集合中的所有元素,Xn子集中所有元素Xn组成集合F,gλ为集合F 上的一个模糊测度,如果存在X1、X2属于F,X1和X2交集为空集,>-1,则满足:
模糊积分具有对多源信息的重要程度(模糊测度)和各信息源提供的客观证据(f 函数)进行融合的能力[8]。在实际应用中,很多问题不能进行简单的线性叠加,模糊积分的方法也是具有类似的不可加性,使用非线性叠加的方法对多源信息进行融合,可以将无人车与无人机两类探测设备在侦察识别中的优劣势进行互补,如无人车对于人员和工事目标识别的虚警率较高,而对于坦克和车辆识别的虚警率较低,识别的准确率较高,无人机对于人员目标识别虚警率较低,而对于坦克有较高的识别率,这些特点可以通过模糊测度函数的形式表示出来,通过无人车与无人机两类探测设备多次侦察测试实验,对坦克、车辆、人员、工事等目标,得出模糊测度概率区间,然后进行改进模糊积分计算并融合,对融合识别的准确性有显著提升。因此,采用基于模糊积分改进的决策级融合方法。
2 基于模糊积分改进的决策级空地融合目标识别
针对空地协同侦察目标信息时空不一致、不同目标识别准确率和虚警率差异大。目标类型特征不同等问题给信息融合带来困难,进行目标信息的时空对准,并采用基于模糊积分改进的决策级融合算法,以克服不同目标识别准确率和虚警率差异大、目标类型特征不同等问题,实现了决策级空地信息融合目标的准确识别。
2.1 目标信息时空对准
基于改进模糊积分的方法进行空地协同的目标融合识别,指挥端将无人机与无人车按照目标区域搜索侦察任务获取到的目标信息,首先进行时空对准处理,再进行实时融合。进行数据信息的空间对准处理,在此基础上再进行时间对准处理。
2.1.1 数据信息空间对准处理
无人机与无人车在执行任务过程中,选择执行侦察任务的起点作为数据空间信息的校准点,将二者的经纬度高程信息转换到同一惯性坐标系下,任务开始执行后,已经进行空间对准的无人机与无人车,开始侦察搜索目标,识别到目标后,通过激光测距得到距离值,无人机利用角度值和距离值、无人车利用距离值分别换算出目标经纬度坐标。因此,两者的数据信息在空间上得到统一。
2.1.2 数据信息时间对准处理
数据的时间对准是将某一时间段内,利用使用的算法将采集到的目标数据同步到同一时刻下。时间对准的方法有很多,常用的有最小二乘准则和插值法[9]。因为插值法所需的计算量大,并且当所需的插值点过多时,需要的插值函数阶数会随之提高,最后求出的数值会有不稳定的情况出现。而最小二乘准则可克服这些缺点,因此,采用最小二乘法进行时间对准处理[9],假设有n 组数据:(tk,F),其中,k=1,2,…,n,则最小二乘表达式为:F(t)=a·tk+b。
无人车与无人机在空间对准的基础上,得到如图1 所示的时间对准示意图,其中,两种不同类型的探测设备采样速率不同,其中,O1A2,O1A3为无人车的仰角测量矢量,O2A1,O2A4为无人机的俯角测量矢量。O2A2,O2A3为无人机时间对准后的俯角方向矢量,O2T 为时间校准后的矢量。

图1 目标信息时空对准示意图Fig.1 Space-time alignment diagram of target information
无人机与无人车的图像采集速率不同,采集每张图片所消耗的时间分别为0.08 s 和0.001 5 s,为了提高时间对准的准确性,采用将高精度采集的数据拟合到低精度采集的数据上,即将无人车采集到的数据拟合到无人机上,无人车数据时间对准到无人机,初始时间为0 s,结束时间为0.08 s。
如表1、表2 分别表示无人机采集到目标数据时的俯仰角角度,以及无人车在一段时间内采集到目标数据信息时的俯仰角度。

表1 无人机采集数据信息Table 1 Data information collected by UAV
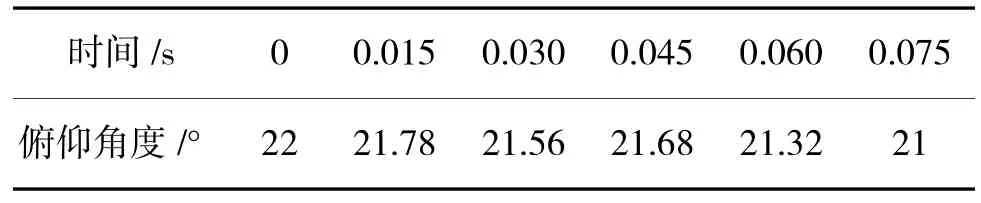
表2 无人车采集数据信息Table 2 Data information collected by UGV
采用最小二乘法进行对准,有
其中,F 为无人车数据的最小二乘多阶曲线拟合函数,根据无人车的拟合曲线和式(4),计算无人机经过时间对准后的角度值ax。其中,tx对应无人车的中间段时间,整理得:ax=75.68°。
通过将高时间精度数据到低时间精度的拟合,解决了两类探测装备时间对准的问题。方向角的计算拟合和俯仰角的拟合方法一致,不再赘述。
2.2 基于模糊积分改进的决策级融合模型构建
假设要侦察的目标有N 个,这N 个目标组成一个集合U,即U={1,2...,n,...N},每个目标的识别结果有L 种,使用的探测设备有M 个,这M 个探测设备组成一个集合S,即S={1,2...,m,...M}。使用探测设备对目标区域进行侦察搜索,采集的信息用μ 来表示,同一探测设备识别不同目标的信息μ 值组成一个集合H,即H={μi1,μi2,...,μim},对同一目标不同探测设备采集的信息μ 值组成一个集合G,即G={μ1k,μ2k...,μnk}。
对于数据信息融合方面,存在硬决策和软决策两种形式。对于硬决策,同一目标的信息,只存在“是”或“不是”两种情况,因此,对于其中一个目标n1的隶属度为:
对于软决策,对同一目标的识别信息可能存在多种可能性,只是不同的可能性确定的概率也不尽相同,本文采用软决策的方式。因此,在这种情况下,对目标的隶属度为:
由于无人车或无人机探测设备侦察识别某一目标时,需要建立与N 种目标结果的匹配关系,并且每种结果之间存在关联性,因此,使用软决策的方式。
无人车或无人机探测设备获取目标信息的概率p,可以用模糊测度来表示,获取到目标信息的可能性越大则概率越大,模糊测度值也越大,反之,获取到目标信息的可能性越小,则概率越小,模糊测度值也越小。由于探测设备受天气状况、地形地势、背景复杂度等不同因素的影响,不同情况下获取目标信息的概率也会不同,但是由于探测设备识别的稳定性,概率值会在一定区间内上下浮动,使用某一个数值作为探测设备,对某一目标识别的模糊密度是不准确的,因此,选用一个区间W 作为其模糊密度区间,使得p⊂W。
下面采用改进Choquet 模糊积分方法进行目标信息的融合识别,其中,Choquet 模糊积分的定义如下:
在不同的环境、天气等背景下,探测设备识别同一目标的模糊密度值在一定范围内浮动,因此,对模糊积分进行如下改进:
计算每个目标的模糊密度gi,经过大量实验数据以及专家经验得到一个价值区间W,该区间包含了大部分实验数据值,并且将目标区间按由小到大的顺序排列,顺序为W'1,W'2,…,W'n,根据模糊密度区间,使用式(1)计算得出非单点集的模糊测度(xn)。
根据在实际作战任务中,获得目标的类型f1(x)、位置f2(x)、毁伤程度f3(x)以及威胁度f4(x)等信息,进行改进模糊积分运算,其中,某一项f(x)的函数值进行由小到大的排序,顺序为f(x'1),f(x'2),…,f(x'n),根据式(8)改进模糊积分计算如下:
2.3 空地协同目标信息融合识别算法流程
基于改进模糊积分的方法,进行空地协同的目标融合识别。指挥端将无人机与无人车按照目标区域搜索侦察任务识别到的目标信息,进行时空对准处理,然后进行实时融合并显示,建立相应的融合模型。使用改进模糊积分的融合过程设计如图2 所示。

图2 基于模糊积分改进的空地目标信息融合流程框图Fig.2 Flow diagram of air-to-ground object information fusion based on fuzzy integral improvement
1)分别获得无人车与无人机的模糊密度,通过大量进行不同环境,不同天气状况等情况下的识别实验以及结合专家经验获得模糊密度区间,以此确定探测设备对某一目标的信任程度;
3)根据式(1)、式(3)、式(9),通过牛顿拉夫逊递推法计算非单点集下的模糊测度区间,并按照由小到大的顺序排列;
4)根据式(8),使用改进后模糊积分进行计算,得到积分值;
5)通过最大隶属度的方法进行解模糊,得出目标的信息,并且在指挥端进行更新显示。
3 仿真实验验证分析
通过将无人机与无人车采集的目标信息,进行融合实验仿真验证,将得到的信息进行融合,并进行目标信息的输出。识别到的每个目标有4 种可能的结果,设N={W1,W2,W3,W4},分别是坦克、车辆、人员以及工事,融合后输出目标信息,包括有目标的位置、类型、数量、毁伤程度、威胁度以及目标距无人车和无人机探测设备的距离。
下面以目标类型的融合实验为例,进行基于改进模糊积分的决策级融合。
在不同环境(边境、城市、山区、荒漠),不同天气状况(阴天、大雾),以及不同背景复杂度(干扰物数量的多少)进行多次试验,并结合专家经验,共同确定模糊密度值gi的区间范围,通过统计实测数据来确定探测设备对某一目标的信任程度。根据不同探测设备,对同一目标的模糊密度区间值,使用左右边界法计算得出值的大小,并通过计算得出改进后模糊测度的区间值。如表3 所示,为单点集下的模糊密度及两元素关联(非单点集)下的模糊测度。

表3 模糊密度与两元素模糊测度区间值Table3 Fuzzydensityandtwoelementfuzzymeasureintervalvalue
无人车与无人机从起点位置出发,按照下发的行驶路线和给定的目标区域,进行侦察搜索识别,如图3 所示为无人机与无人车采集目标信息数据图。

图3 无人机与无人车采集目标信息数据图Fig.3 UAV and UGV acquisition target information data diagram
将无人车和无人机采集的目标信息类型进行回传,表4 为两类探测设备的光电装置识别结果统计及使用改进模糊积分方法计算得出的归一化数值。其中,fk(x)表示探测设备获取到识别的目标隶属于正确目标的可信度,并且根据式(8)进行改进后模糊积分计算,并使用式进行归一化。
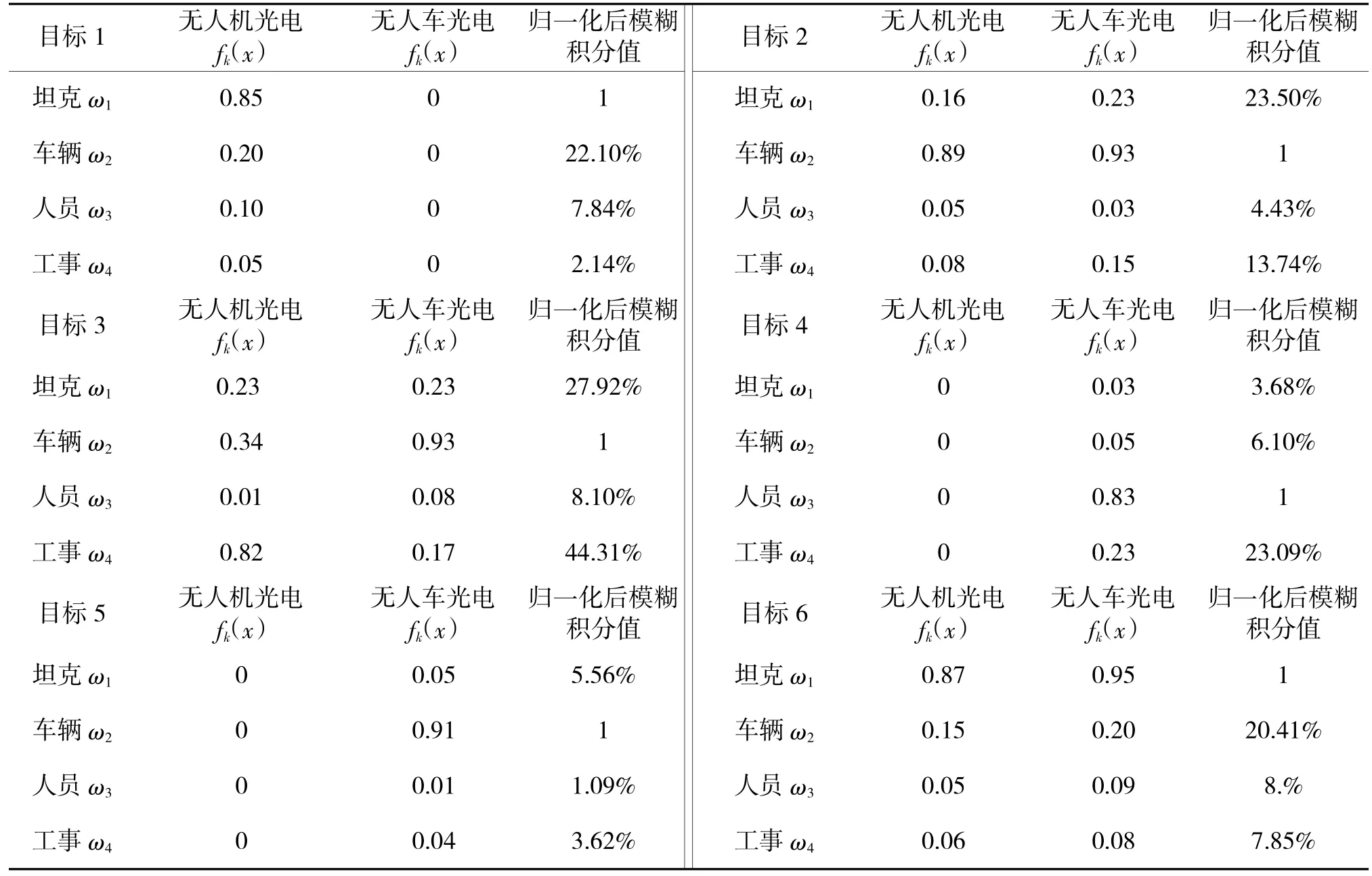
表4 光电装置识别结果统计及模糊积分值Table 4 Identification result statistics and fuzzy integral value of photoelectric device
对于目标1 的无人车光电fk(x)值为0,表示无人车探测装备在侦察搜索目标时,未识别出目标1,同理无人机探测设备fk(x)值为0,未识别出目标4、目标5。
同理,使用上述计算目标类型的改进模糊积分融合计算方法,对毁伤程度和威胁度进行计算。
其中,毁伤程度分为部件功能的丧失和内部性能的下降,通过无人车和无人机两类探测装备,只能通过外观的受损程度来判定目标的整体毁伤程度。其中,判定毁伤程度分为4 级,1 级毁伤程度最小,各项指标均在正常范围内,4 级毁伤程度最大,部件功能与内部性能均毁伤严重,毁伤程度的数值具体到小数点后1 位。
威胁度根据目标类型、毁伤程度和目标距无人车和无人机的距离共同决定,距离越近,毁伤程度越小,则威胁度越高,并且按目标类型进行威胁度比较,坦克、车辆、工事、人员的威胁度依次降低,对于同种类型的目标,威胁度的数值随概率值的减小而降低。与上述目标类型概率的模糊积分的融合算法求解相似,进行多次模糊积分求得融合后的值,如下页图4 所示为威胁度进行模糊积分的过程图。

图4 威胁度融合过程图Fig.4 Threat fusion process diagram
无人车和无人机两类探测设备获取的目标信息,在指挥终端进行交互与处理,使用基于模糊积分改进的决策级融合方法,将信息进行融合,得到如表5 所示。

表5 目标信息融合结果表Table 5 Target information fusion result table
无人车与无人机两类探测设备,在不采用信息融合方式下,单平台分别对目标进行侦察搜索、侦察的准确率不高,并且有很大的虚警率;采用模糊积分的决策级融合,未考虑不同环境因素下的模糊测度值,在某些特定的场景下,相比于未融合的情况,同样提高了准确率,降低了虚警率。本文采用的模糊积分改进的决策级融合方法,考虑了多种环境、背景、天气状况的因素下,目标信息融合的准确率和虚警率都有明显改进。
由表6 可知,采用本方法,准确率达到86%,虚警率降低到3.64%,比使用模糊积分的决策级融合方法以及单平台获取目标信息更有优势,提高了融合目标信息识别的准确率,降低了虚警率。

表6 3 种方法比较表Table 6 Three methods compare table
4 结论
通过使用空地协同的模式进行侦察识别目标,并对目标信息处理,提出两类探测平台进行目标侦察信息融合的方法。本算法对目标信息进行时空对准处理后,采用基于模糊积分改进的决策级融合方法,进行实时融合,输出融合识别结果、位置、威胁度、毁伤程度等更完善的信息。实验结果表明,该算法将无人机与无人车的目标识别信息融合起来,比起单一探测平台获取的信息,有效提高了目标识别的准确度,降低了虚警率。改进模糊积分的决策级融合方法通过将目标的多源信息进行融合,可以适应不同环境条件的目标探测与识别捕获,有利于得到目标更准确的状态,可以对整个战场态势进行精确评估,便于指挥中心下发的决策指令,并且提高了抗干扰能力和容错能力,这也是空地信息融合的优势所在。在后续的实验中,将逐步增加信息源的数量,进行3 个乃至多个探测设备的目标信息融合识别实验,获得更加完善的目标信息,提高准确率。
猜你喜欢
数学物理学报(2022年3期)2022-05-25
数学物理学报(2022年2期)2022-04-26
数学物理学报(2020年4期)2020-09-07
数学年刊A辑(中文版)(2020年2期)2020-07-25
小哥白尼(军事科学)(2019年2期)2019-04-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
当代陕西(2018年12期)2018-08-04
中国惯性技术学报(2017年1期)2017-06-09
岷峨诗稿(2017年4期)2017-04-20
新高考(英语进阶)(2017年12期)2017-02-26
