
自适应调节重心林间运输车设计与仿真
2024-04-27 00:45王慧安洋崔生乐杨春梅
中国农机化学报 2024年3期
王慧 安洋 崔生乐 杨春梅

摘要:为提高运输车在林间的工作效率,研究设计一款能够远程遥控且能根据自身运动姿态自动调节重心的小型林间履带式运输车。通过理论计算完成整车各部分机构的设计,分析整车在可调节重心机构调控下的通过性,确定可调节重心机构的控制策略,并利用Recurdyn软件对整机进行通过性模拟仿真。仿真结果表明,经过调控重心后,整机的通过性得到有效提升,整机上坡的极限角度提高17.9%,横坡的极限角度提高18.3%,极限越障高度提高18.7%,跨壕极限宽度提高13.9%。
关键词:林地环境;林间履带式运输机;可调节重心机构;通过性;Recurdyn
中图分类号:TH122: U469.6+94 文献标识码:A 文章编号:2095-5553 (2024) 03-0148-08
Design and simulation of forest transporter with self-adaptive center of gravity
Wang Hui, An Yang, Cui Shengle, Yang Chunmei
(College of Mechanical and Electrical Engineering, Northeast Forestry University, Harbin, 150040, China)
Abstract:
In order to improve the working efficiency of the transporter in the forest, this paper studies and designs a small forest crawler transporter which can be remotely controlled and automatically adjust the center of gravity according to its own movement posture. The mechanism design of each part of the whole vehicle is completed by theoretical calculation, and the trafficability of the whole vehicle under the control of the adjustable center of gravity mechanism is analyzed, and the control strategy of the adjustable center of gravity mechanism is determined. The simulation results show that after the control of the center of gravity, the machine trafficability is effectively improved, the limit Angle of the machine uphill is increased by 17.9%, the limit Angle of the transverse slope is increased by 18.3%, the limit obstacle height is increased by 18.7%, and the limit width of the trench is increased by 13.9%.
Keywords: forest environment; forest crawler conveyor; adjustable center of gravity mechanism; trafficability; Recurdyn
0 引言
我国林业种类繁多,按照形成方式可以分为天然林与人工林两大类。其中天然林是经过植被自然生成的,地形十分复杂且林间距大小不一;而人工林是通过人工措施形成的森林。人工林的经营目的明确,树种选择、空间配置及其他造林技术措施都是按照人们的要求来安排的。按照经营目的人工林可分为,防护林、特種用途林、薪炭林、经济林以及用材林。通过我国大力发展林业,其森林覆盖率已经从20世纪80年代初的12%,提高到目前的22.96%,人工林面积居全球第一[1]。人工林特点一般为同龄林,林相整齐;森林树种组成较少,层次结构较单纯;个体的水平分布均匀,布局较合理。成年人工林间距大部为3~5m。
林间剩余物是指以木材生产为主的森林经营和生产过程中产生的林木剩余物,包括森林采伐和造材剩余物、加工剩余物、森林抚育和间伐剩余物等。林间剩余物是一种重要的生物质能源,但每年都有大量的林间剩余物没有被回收利用。在环境污染和能源日益紧缺的情况下,林间剩余物的利用,不仅可以有效缓解能源短缺压力,还可有效减少资源浪费、环境污染和森林火灾等问题[2, 3]。
但由于林区恶劣的运输环境,车辆无法进入运输,我国对于林区的生产运输问题还是主要依靠于人力及畜力,这大大降低了林间作业运输的生产效率。应智能化与时代发展的要求,将科技与林业结合,设计一款小型灵活、通过性高、能够满足运输要求且能在林间复杂环境行走的履带式运输车变得很有必要。
Doi等[4]研究设计了一种带有能够自动升降调平平台的林间运输车,可以在车辆通过复杂地形时使载物箱保持水平,从而提高车辆行驶的稳定性。但这种装置在一定程度上提高了整车的重心,在更加复杂的地形上无疑增加了翻车的风险。韩振浩等[5]研究设计了一种可以调节重心的山地果园运输机,经过调节重心后运输机的通过性得到了一定提升,但其在通过各种地形时都需要提前手动进行调节,实际操作起来并不方便且容易出错,且该运输机并不能适应林间复杂的地形。
综上,本文设计一款能够远程遥控且能根据自身运动姿态自动调节重心的小型林间履带式运输机。
1 机构设计与分析
1.1 可调节重心机构
通过阅读大量文献得知,履带底盘的通过性与重心的位置密切相关[6, 7]。例如在越障的过程中,翻车的临界状态便是整机的重心垂线与垂直壁障的近边重合[8, 9]。所以本文设想一种能够根据自身的姿态可以实时自动调节整车的重心位置的装置,使整车的通过性提高,降低翻车的风险。
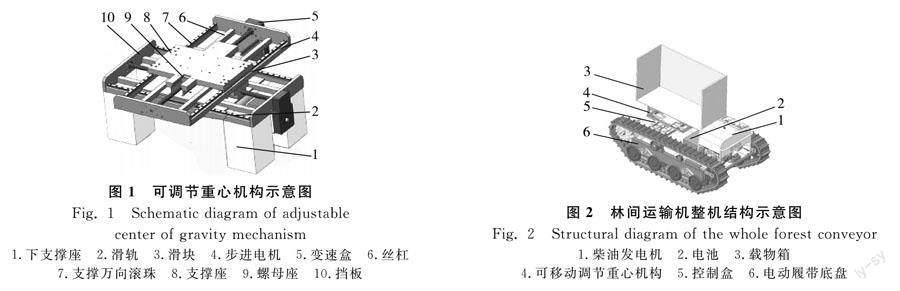
根据工作原理,可移动调节重心机构设计如图1所示。
该机构由两个步进电机,一个纵向导轨和一个横向导轨以及其他若干零部件组成。步进电机控制精准,在低速时也能提供较大扭矩。通过齿轮将步进电机的动力传递给滑轨上,进而平稳地控制承载在滑轨上的载物箱前后左右移动,起到调节重心的作用。控制部分由stm32f103单片机、姿态传感器、距离传感器等组成。通过传感器等实时检测整车的姿态,以及相应的距离,然后将信号传送到单片机进行处理,进而对机构进行调整使整车的重心位于适当的位置。
1.2 履带底盘
履带式底盘的结构设计由双直流无刷电机、减速器、驱动轮、支撑轮、导向轮、张紧轮以及履带组成。考虑林间地形复杂,障碍物随处可见,需要越障,爬坡及转向次数较多,因此采用倒梯形结构底盘,将动力后置,且采用双电机分别控制两侧履带行进,有利于提高整车的通过性并缩小转向角度。
底盘运动时,驱动轮将直流电机的能量转化为底盘行驶的动能,支撑轮起到支撑履带的作用,导向轮和张紧装置保证了履带的卷绕方向并承受行驶时履带受到的冲击力。支重轮通过游离三角与车架铰接,其位置可根据地形的变化进行调节,避免支撑轮悬空时对底盘产生的载荷分布不均,从而提高底盘的稳定性。
整机底盘通过遥控[9]的方式进行行走作业,采用无差速的方式驱动履带底盘的两侧履带,两侧直流电机通过减速器驱动底盘两侧的主动轮。每个直流电机由控制系统直接控制,前进或者后退时由控制系统控制两个电机进行正转或者反转操作,转向时,由控制系统改变底盘两侧电机的速度实现底盘的差速转向、切边转向以及原地转向。
1.3 整机结构
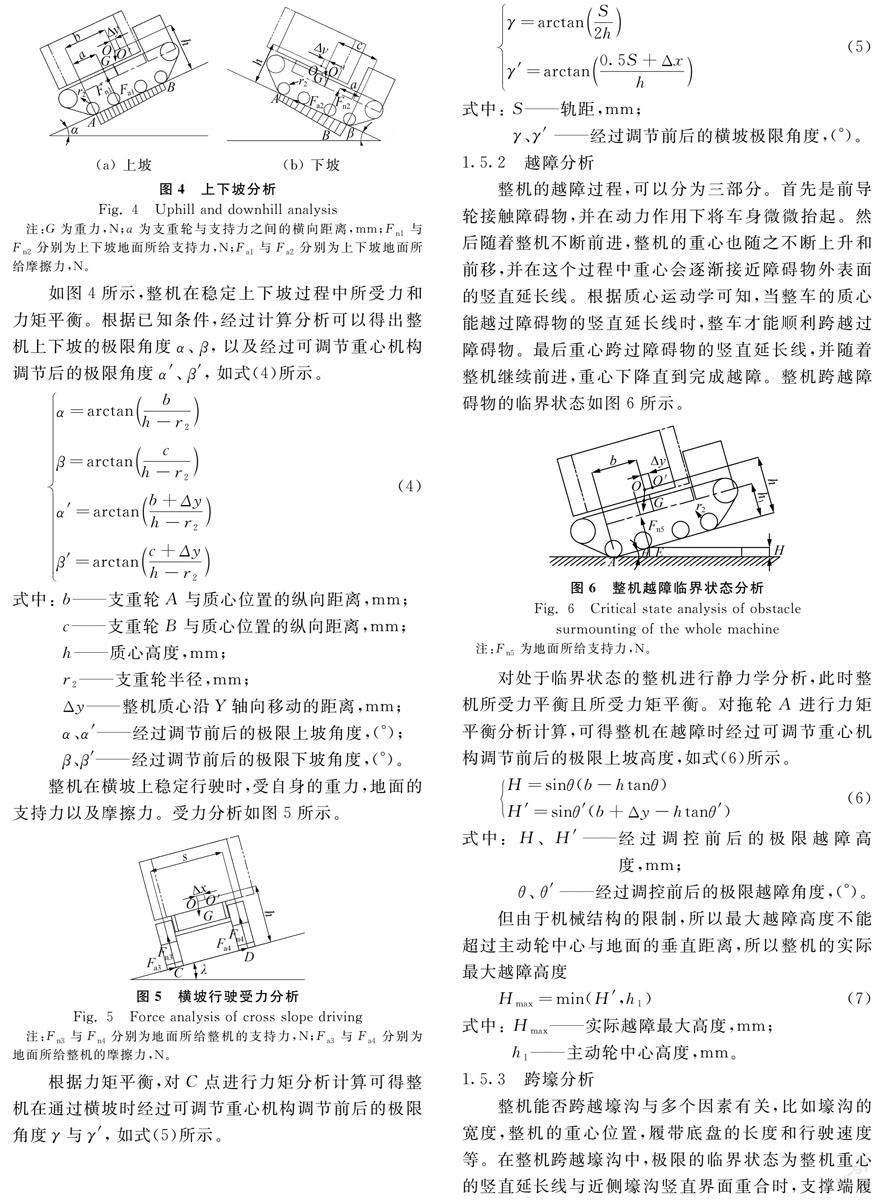
整机结构由电动履带式底盘,柴油发电机,自适应可移动调节重心装置、电池、控制箱以及传动和驱动机构组成。设计整机负载高,通过性强,通过遥控可实现在林间进行灵活的运输工作,从而提高操作人员的安全性。整机尺寸为2000mm×1500mm×1100mm,结构如图2所示。
整机行走由柴油发电机提供动力,解决了装备在林间复杂地形行走的功率问题。大部分功率提供给驱动底盘行走的两个大功率直流电机上,小部分电力通过电池存储起来,通过电池将电力供给驱动可移动调节重心机构的电机上以减少能源浪费。可调节重心装置由两个步进电机作为动力源,通过姿态传感和距离传感器等在行走的过程中自动检测信号,进而通过控制器来自动调节载物箱的位置以达到调节重心的目的,从而提高整车的通过性。
1.4 整机重心位置计算
确定重心位置是实现该机构功能的基础,同时为保证车辆能够拥有良好的通过性,重心位置应该尽可能地设计在车辆的中心的正下方,且重心越低车辆行驶越稳定。本文采用分块法,根据整机各个机构将其分成数个简单的模块,分别求解出各个模块的重心,在整机外部一点建立三维坐标系分别确定每个模块重心在坐标系中的位置,最后求解出整机的重心。分块法计算重心示意图如图3所示。
整车的横向机构设计采用对称分布,所以X轴向重心可以看作近似位于整机横向的中心线处。Y轴向重心的计算,可以先假设一个点O为Y轴向重心位置,然后将分块后各部分的重心位置到该点的垂直距离假设为y0,y1,y2……。Z轴向的重心位置计算,可以假设点O为Z轴向的重心位置,然后将分块后各部分的重心位置到该点的Z轴向的距离假设为z0,z1,z2……。再以可调节重心机构的极限移动位置为例,计算出整机经过该机构调整过后的重心位置,如图3(c)所示。
根据已知条件和力矩平衡可得
y1+y5=L1y2+y4=L2y2+y5=L3y3+y4=L4m1y1+m2y2=m3y3+m4y4+m5y5(1)
式中:m1——载物箱质量,kg;m2——可调节重心机构质量,kg;m3——履带底盘质量,kg;m4——电池质量,kg;m5——柴油发电机质量,kg;L1——載物箱与柴油发电机的质心横向距离,mm;L2——可调节重心机构与电池的质心横向距离,mm;L3——可调节重心机构与柴油发电机的质心横向距离,mm;L4——底盘与电池的质心横向距离,mm。
求解式(1)可得整机经过调节前的重心在Y轴向的位置。
z1+z2=D1z1+z3=D2z1+z4=D3z1+z5=D4m1z1=m2z2+m3z3+m4z4+m5z5(2)
式中:D1——载物箱与可调节重心机构的质心纵向距离,mm;D2——载物箱与底盘的质心纵向距离,mm;D3——载物箱与电池的质心纵向距离,mm;D4——载物箱与柴油发电机的质心纵向距离,mm。
求解式(2)可得整机重心在Z轴向的位置。
由于整机设计的时候一般都为左右对称,所以整机X轴向的重心位于整机的横向中心。但经过调节时,整机重心会有横向变动。
m1(Δd-Δx)=(m2+m3+m4+m5)Δx(3)
式中:Δd——载物箱沿X轴向移动距离,mm;Δx——整机重心沿X轴向移动的距离,mm。
求解式(3)可得整车经过横向调节前后的重心在X轴向的重心位置,如图3(b)所示。
1.5 通过性分析
林间地形复杂多变,多有坡道、障碍物以及壕沟,普通车辆在林间难以行走,且有翻车的危险。因此要求需要有良好的通过性以及稳定性。因整车在满载时,重心最高通过性最差,且重心经过机构调节更明显,所以本文以整车满载500kg时为例,通过调节重心机构调控重心分别对这三种情况进行整机的通过性分析。
1.5.1 上、下坡以及通过横坡分析
整机在上下坡时,受到自身的重力,和地面给的支持力以及摩擦力。受力分析如图4所示。
如图4所示,整机在稳定上下坡过程中所受力和力矩平衡。根据已知条件,经过计算分析可以得出整机上下坡的极限角度α、β,以及经过可调节重心机构调节后的极限角度α′、β′,如式(4)所示。
α=arctanbh-r2β=arctanch-r2α′=arctanb+Δyh-r2β′=arctanc+Δyh-r2(4)
式中:b——支重轮A与质心位置的纵向距离,mm;c——支重轮B与质心位置的纵向距离,mm;h——质心高度,mm;r2——支重轮半径,mm;Δy——整机质心沿Y轴向移动的距离,mm;α、α′——经过调节前后的极限上坡角度,(°);β、β′——经过调节前后的极限下坡角度,(°)。
整机在横坡上稳定行驶时,受自身的重力,地面的支持力以及摩擦力。受力分析如图5所示。
根据力矩平衡,对C点进行力矩分析计算可得整机在通过横坡时经过可调节重心机构调节前后的极限角度γ与γ′,如式(5)所示。
γ=arctanS2hγ′=arctan0.5S+Δxh(5)
式中:S——轨距,mm;γ、γ′ ——经过调节前后的横坡极限角度,(°)。
1.5.2 越障分析
整机的越障过程,可以分为三部分。首先是前导轮接触障碍物,并在动力作用下将车身微微抬起。然后随着整机不断前进,整机的重心也随之不断上升和前移,并在这个过程中重心会逐渐接近障碍物外表面的竖直延长线。根据质心运动学可知,当整车的质心能越过障碍物的竖直延长线时,整车才能顺利跨越过障碍物。最后重心跨过障碍物的竖直延长线,并随着整机继续前进,重心下降直到完成越障。整机跨越障碍物的临界状态如图6所示。
对处于临界状态的整机进行静力学分析,此时整机所受力平衡且所受力矩平衡。对拖轮A进行力矩平衡分析计算,可得整机在越障时经过可调节重心机构调节前后的极限上坡高度,如式(6)所示。
H=sinθ(b-htanθ)H′=sinθ′(b+Δy-htanθ′)(6)
式中:H、H′——经过调控前后的极限越障高度,mm;θ、θ′——经过调控前后的极限越障角度,(°)。
但由于机械结构的限制,所以最大越障高度不能超过主动轮中心与地面的垂直距离,所以整机的实际最大越障高度
Hmax=min(H′,h1)(7)
式中:Hmax——实际越障最大高度,mm;h1——主动轮中心高度,mm。
1.5.3 跨壕分析
整机能否跨越壕沟与多个因素有关,比如壕沟的宽度,整机的重心位置,履带底盘的长度和行驶速度等。在整机跨越壕沟中,极限的临界状态为整机重心的竖直延长线与近侧壕沟竖直界面重合时,支撑端履带另一端刚好接触在壕沟远侧边界上。则整机前端或者后端不会陷落壕沟,此时的壕沟宽度为整机跨越壕沟的极限宽度。
因整机重心不在中心,所以经过分析整机在进入与离去阶段跨好宽度会略有不同。如图7所示,整机处于进入阶段时,可跨壕沟宽度为临界跨壕宽度M1。当整机处于离去阶段时,临界跨壕宽度为M2,可据此来确定整机极限的宽度,如式(8)所示。
M1=e2+h12+r1M2=f2+h12+r1(8)
式中:M1——进入阶段时临界跨壕宽度,mm;M2——离去阶段时临界跨壕宽度,mm;e——主动轮与质心的横向距离,mm;f——导向轮与质心的横向距离,mm;r1——主动轮半径,mm。
经过可调节重心机构调节重心位置后,整机可跨壕沟最大距离为
M1′=(e+Δy)2+h12+r1M2′=(f+Δy)2+h12+r1M=min(M1′,M2′)(9)
式中:M——整機可跨壕沟最大距离,mm。
1.6 可调重心机构控制策略
姿态传感器作为一种高精度的测量仪器,是检测载体姿态变化的重要工具,其在工业控制、军事装备、航空航天等领域应用十分广泛。本文将此传感器灵活的运用在林业装备上,通过安装在整机底盘上的姿态传感器,可以检测到整机的实时位姿[13]。然后将检测到的信号传送到主控制器上,主控制器根据接收到的数据进行处理,随后传出指令控制机构上的步进电机驱动滑轨,对载物箱的位置进行调整并运用PID算法进行反馈调节,进而起到调节整机重心的作用,实现整机重心的自适应调整。同时在横向滑轨与纵向滑轨上各安装一个距离传感器,通过记录可调节重心机构的起始平衡位置,在机构启动或停止时通过距离传感器检测的距离初始化载物箱的位置。且由控制器设置横向滑轨与纵向滑轨的极限移动距离,保证载物箱移动距离不会超出极限,导致危险情况发生。
根据整机的通过性分析,改变重心在一个适当的位置可以提高整机的通过性。通过MATLAB软件求解式(1),根据载物箱沿Y轴移动距离的变化,可以计算得到重心在Y轴向位置的变化。选取多个数据作为离散点,如表1所示为载物箱纵向移动距离的变化长度对应的重心位置改变的距离。
根据表1中的数据可以看出Δl与Δy的关系大致成线性变化,利用MATLAB软件对表一中的数据进行一次线性拟合,得到 Δl与Δy的线性拟合关系如式(10)所示。
Δl=2.2Δy-1.42(10)
式中:Δl——载物箱沿Y轴移动的距离,mm。
同理根据式3,可以得到在X轴向载物箱重心的变化距离Δx与整机重心的变化距离Δd之间的关系,如式(11)所示。
Δd=2.22Δx(11)
根据整机的通过性分析,整机在上下坡时本身可通过最大斜坡倾角为α,经过调节重心后可通过最大斜坡倾角为α′,当整机通过最大斜坡倾角时,此时也有翻车的风险。为了提高安全性,应及时通过机构调节重心使整机处于一个安全的可控的范围。且在小角度的安全范围内,并不需要机构频繁地调整重心,避免能源浪费,提高机构寿命。所以当整机本身倾斜角达到α时,应调节载物箱到达极限位置上。如式(4)所示,为最大倾角与重心纵向距离变化的关系。将式进行修改,可得可调节重心机构准备开始调节的倾角α″。
α″=arctanb-Δyh-r2(12)
同时根据Δl与Δy的线性拟合关系,将式(10)与式(12)结合,得到载物箱纵向移动距离与角度的变化关系如式(13)所示。
Δl=2.14(b-htanα″)+0.16(13)
在横坡上行驶时,整机本身的最大通过横坡角度为γ,在经调节重心后角度變化为γ′。同理将式(5)进行修改,可得可调节重心机构准备开始调节的横坡倾角γ″。
γ″=arctan0.5S-Δxh(14)
根据在X轴向载物箱重心的变化距离Δd与整机重心的变化距离Δx之间的关系,结合式(12)与式(14),可得到载物箱横向移动距离与角度的变化如式(15)所示。
Δd=2.15(0.5S-htanβ″)(15)
综上所述,在整机通过各种地形时,由姿态传感器实时检测整机倾角的变化,在横向与纵向的倾角超过一定的角度时,便由控制器下达指令控制电机带动滑轨移动进而控制载物箱移动,并根据式(13)与式(15),由整机倾角的变化精确控制载物箱移动的方向与距离。
2 模拟仿真
2.1 建立模型
本文采用Recurdyn软件对整机进行动力学仿真[15],RecurDyn (Recursive Dynamic)是新一代多体系统动力学仿真分析软件。它采用相对坐标系运动方程理论和完全递归算法,非常适合于求解多体系统动力学问题,是一款集成了多学科、多功能、综合性的专业CAE仿真平台,且Recurdyn本身带有专业的履带模块,便于履带建模和计算仿真。
首先运用Recurdyn中的履带模块,对链节、主动轮、拖轮、导向轮、支撑论以及支架进行参数化建模。使用assembly功能,顺次连接主动轮等创建履带,然后添加约束和动力。退出该模块,将履带与导入的Solidworks整机主体模型进行装配,添加约束,材料属性等。最后根据Recurdyn的ground功能创建路面,鉴于林间的工作环境,采用其中的黏土(clayey soil)路面模型。添加履带表面与路面的接触点,进行仿真分析。
2.2 通过性仿真
以整机满载500kg且低速1.08km/h行驶时为例,建立各种复杂地形通过仿真来分析整机在重心调控前以及调控后的通过性。
2.2.1 上下坡及横坡通过性仿真
整机在斜坡以及横坡的通过性仿真如图8、图9所示,由于整机重心相对来说较为靠后,在上坡时更容易翻车,调控重心效果也更为明显,所以本文在纵向调控时只针对整机上坡进行仿真。在整机仿真时以初始坡度20°开始仿真,随后坡度每次增加一度,进行多次仿真直到整机倾覆为止,可以得到在未调控重心前的极限上下坡以及横坡角度。
随后利用机构调节载物箱位置,每次移动40mm并适当增加斜坡角度,进行多次仿真直到机构到达可调节范围内的极限位置处。仿真结果如表1所示。
2.2.2 越障仿真
通过阅读大量文献以及进行多次仿真试验可知,整机在翻越壁障时,速度越低,俯仰角越小,行驶过程越平稳,通过性越强,所以在越障时应尽量减速慢行。本文以低速0.36km/h速度进行整机翻越300mm壁障的仿真,越障仿真过程如图10所示。
以低速进行仿真模拟时,设定初始壁障高度为200mm,每次增加20mm,直至整机无法翻越为止。随后利用机构调节载物箱纵向位置,每次移动40mm并适当增加壁障高度,直到重心到达可调节范围内的极限位置处。仿真结果如表3所示。
2.2.3 跨壕仿真
当整机跨壕时,可以分为进入和离去两个阶段,而重心在整机中的位置便会影响整机跨壕的能力。本文首先在调控整机重心前进行多次跨壕仿真,逐渐增大壕沟距离直到整机掉入壕沟之中,记录此时壕沟距离为整机在调控前的极限跨壕距离。
随后利用机构调节载物箱位置,每次移动40mm并适当调整壕沟宽度,进行多次仿真。仿真过程如图11所示,仿真结果如表4所示。
2.3 结果分析
本文通过对整机的通过性试验仿真,得到整机翻越各种地形的仿真结果如表2~表4所示,对其数据进行整理分析绘制折线图,如图12所示。可以看出,经过可调重心机构调控后整机翻越各种地形的能力呈上升趋势,说明整机的通过性得到了有效提升。由于理论分析时未考虑土壤变形等其他因素影响,导致仿真结果与计算分析数值存在一些差别,但总体符合计算分析趋势。根据仿真结果数据进行计算,经过调控后,上坡的极限角度提高了17.9%,横坡的极限角度提高了18.3%。调控重心后的整机极限越障高度较调控前提高了18.7%,跨壕极限距离相较于调控前提高了13.9%。
3 结论
为提高运输车在林间复杂地形的工作效率,本文提出一种可调节重心的小型林间履带运输车,完成底盘等机构的设计,并对整机的通过性进行理论分析,制定可调节重心机构的控制策略,最后利用Recurdyn软件对整机通过各种复杂地形进行模拟仿真。
1) 通过模拟仿真得出在调控重心前整机上坡的极限角度为35.21°,通过横坡的最大角度为28°,可翻越最大壁障高度为320mm,跨越壕沟最大宽度为834mm。由于未考虑路面等因素影响,仿真结果与理论分析有一定差别,但总体符合理论分析趋势。
2) 经过可调节重心机构进行调控后,整机的通过性能得到有效提升。通过仿真结果可知经过调控后整机上坡的极限角度提高17.9%,横坡的极限角度提高18.3%,极限越障高度提高18.7%,跨壕极限宽度提高13.9%。
3) 经过理论分析和仿真验证,本文所设计的整机可以在林间复杂环境下进行高效率的工作。
参 考 文 献
[1]孙长山. 探索中国森林资源发展现状 [J]. 林业勘查设计, 2020, 49(4): 22-24, 42.
Sun Changshan. Explore the development status of Chinas forest resources [J] Forestry Prospect and Design, 2020, 49 (4): 22-24, 42.
[2]邓长春, 林晓庆, 李建平, 等. 我国采伐剩余物的清理和利用现状及对策 [J]. 四川林业科技, 2016, 37(2): 107-110.Deng Changchun, Lin Xiaoqing, Li Jianpin, et al. Current situation and countermeasures of clearing and utilization of cutting residues in China [J] Journal of Sichuan Forestry Science and Technology, 2016, 37 (2): 107-110
[3]郝月兰, 夏朝宗. 我国林业特色资源利用现状及发展前景分析 [J]. 南方农业, 2021, 15(31): 142-146.Hao Yuelan, Xia Chaozong. Analysis on present situation and development prospect of forestry characteristic resources in China [J]. South China Agriculture, 2021, 15(31): 142-146.
[4]Doi M, Fukuhara S, Mori Y, et al. Design of balance control system for high maneuverability vehicle on steep sloping ground[J]. Electronics and Communications in Japan, 2016, 99(10): 3-12.
[5]韩振浩, 朱立成, 苑严伟, 等. 基于重心自适应调控的山地果园运输车设计与试验[J]. 农业机械学报, 2022, 53(2): 430-442.Han Zhenhao, Zhu Licheng, Yuan Yanwei, et al. Design and test of mountain orchard transporter based on adaptive control of gravity center [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(2): 430-442.
[6]杨腾祥, 金诚谦, 蔡泽宇, 等. 履带式联合收割机横向调平底盘设计[J]. 中国农机化学报, 2020, 41(7): 1-8.Yang Tengxiang, Jin Chengqian, Cai Zeyu, et al. Design of lateral leveling chassis of caterpillar combine [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(7): 1-8.
[7]潘冠廷, 杨福增, 孙景彬, 等. 小型山地履带拖拉机爬坡越障性能分析与试验[J]. 农业机械学报, 2020, 51(9): 374-383.Pan Guanting, Yang Fuzeng, Sun Jingbin, et al. Analysis and test on climbing and obstacle climbing performance of small mountainous crawler tractors [J] Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(9): 374-383.
[8]陳继清, 黄仁智, 莫荣现, 等. 基于RecurDyn小型绿篱修剪机履带底盘越障性能分析与仿真[J]. 中国农机化学报, 2020, 41(10): 89-98.Chen Jiqing, Huang Renzhi, Mo Rongxian, et al. Analysis and simulation of obstacle surmounting performance of track chassis of small hedge trimmer based on RecurDyn [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(10): 89-98.
[9]马锃宏, 王蓬勃, 耿长兴, 等. 自走式履带底盘遥控系统设计与试验[J]. 中国农机化学报, 2018, 39(3): 42-45.Ma Zenghong, Wang Pengbo, Geng Changxing, et al. Design and test of remote control system for self-propelled crawler chassis [J]. Journal of Chinese Agricultural Mechanization, 2018, 39(3): 42-45.
[10]Liang K, Zhang T Q, Shen X M, et al. An improved LuGre model for calculating static steering torque of rubber tracked chassis [J]. Defence Technology, 2022, 18(5): 797-810.
[11]韩振浩, 朱立成, 苑严伟, 等. 山地果园履带底盘坡地行驶通过性能分析与优化设计[J]. 农业机械学报, 2022, 53(5): 413-421, 448.Han Zhenhao, Zhu Licheng, Yuan yanwei, et al. The performance analysis and optimal design of track chassis driving on slope in mountain orchard were carried out [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(5): 413-421, 448.
[12]劉妤, 谢铌, 张拓, 等. 小型山地履带底盘设计与仿真分析[J]. 机械设计, 2020, 37(6): 115-122.Liu Yu, Xie Ni, Zhang Tuo, et al. Design and simulation analysis of small mountain track chassis [J].Journal of Machine Design, 2020, 37 (6): 115-122.
[13]王廷轩, 苏康友, 潘光焕, 等. 基于姿态传感器和控制力矩陀螺的小车重心控制系统设计[J]. 信息与电脑(理论版), 2021, 33(20): 98-102, 112.Wang Tingxuan, Su Kangyou, Pan Guanghuan, et al. Design of barycenter control system of trolley based on attitude sensor and control moment gyroscope [J] Information & Computer, 2021, 33(20): 98-102, 112.
[14]Sun S F, Wu J F, Ren C L, et al. Chassis trafficability simulation and experiment of a LY1352JP forest tracked vehicle [J]. Journal of Forestry Research, 2021, 32(3): 1315-1325.
[15]张响亮, 张华, 熊根, 等. 基于RecurDyn的履带式消防机器人设计与爬梯运动学仿真[J]. 机械传动, 2020, 44(6): 89-95.Zhang Xiangliang, Zhang Hua, Xiong Gen, et al. Design of tracked firefighting robot based on RecurDyn and kinematics simulation of climbing ladder [J]. Journal of Mechanical Transmission, 2020, 44(6): 89-95.
[16]孙景彬, 楚国评, 潘冠廷, 等. 遥控全向调平山地履带拖拉机设计与性能试验[J]. 农业机械学报, 2021, 52(5): 358-369.Sun Jingbin, Chu Guoping, Pan Guanting, et al. Design and performance test of remote control omnidirectional leveling mountain crawler tractor [J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(5): 358-369.
[17]姚呈祥, 袁建宁, 潘金坤, 等. 橡胶履带联合收获机仿形底盘行走系统设计与仿真[J]. 中国农机化学报, 2020, 41(2): 107-113.Yao Chengxiang, Yuan Jianning, Pan Jinkun, et al. Design and simulation of copying chassis running system of rubber caterpillar combine harvester [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(2): 107-113.
基金项目:中央财政林业科技推广示范项目(黑[2022] TG13号);中央高校基本科研业务费专项资金项目(2572022DP02)
第一作者:王慧,女,1965年生,黑龙江哈尔滨人,博士,副教授;研究方向为林业机械。E-mail: Wanghui90527@126.com
通讯作者:杨春梅,女,1977年生,黑龙江哈尔滨人,博士,教授;研究方向为林业智能装备与检测。E-mail: ycmnefu@126.com
