基于地形跟随模型的极限告警曲线计算方法
2024-04-27 12:12庞华群张启鹏
火力与指挥控制 2024年1期
孙 锴,庞华群,温 佳,闵 彤,张启鹏
(1.太原航空仪表有限公司,太原 030006;2.西北工业大学电子信息学院,西安 710072;3.空军装备部驻太原地区军事代表室,太原 030006)
0 引言
在航空事业中,可控飞行撞地事故是航空运输过程中频繁出现的危害,指在飞行任务中由于飞行员未能及时察觉与障碍物的接近危险,导致飞机撞山、撞地或入水引发的飞行事故[1]。近年来,为了应对此类事故,国内外均展开了近地告警系统的研究与应用,文献[2-4]对基于系统性能、虚拟三维环境、SCADE 的近地告警系统进行了研究与设计,文献[1]为了减少实验成本对仿真实验平台进行了详细研究,文献[5-6]对从国外发起的增强型近地告警系统进行了不断的改进,文献[7-8]对空中防撞系统与近地告警系统在未来发展中的融合趋势进行了分析。
我国在近地告警技术方面起步较晚,技术还不成熟,自主设计的近地告警系统在实际使用过程中存在各种问题。从现有的研究成果来看,大多数学者主要通过模拟随机地形,利用蒙特卡罗方法研究飞机操作性能参数,进而得到各种告警包线或者告警阈值,最后将飞机状态与之作比较进行近地告警判断。这种研究方法存在两个缺陷:一是地形不具备真实性;二是蒙特卡罗方法是一种统计方法,计算复杂并且有概率误差。为解决这两个问题,本文基于真实地形数据,提出了一种低空飞行极限告警曲线计算方法,利用极限告警曲线直接判断是否会发生撞地危险,并且能够在实际飞行过程中有效发出告警,给出合理的极限避撞方案。
1 地形跟随算法
为了模拟飞机执行任务时的安全飞行过程,本文利用综合航迹平滑算法进行地形跟随航迹规划[9],飞机按照该航迹飞行不会出现危险情况,一旦偏离航线,则需利用极限告警曲线进行航路纠正,避免碰撞。综合航迹平滑算法的具体步骤如下:
Step 1 获取真实地形数据。利用三维地形数据描绘飞机航向截面内的地形高度曲线,为航迹规划提供参考航迹;
Step 2 坡度限制平滑。飞机飞行具有最大爬升角限制,利用坡度限制平滑算法对参考航迹进行坡度限制;
Step 3 曲率限制平滑。飞机飞行还存在最大法向过载限制,利用曲率限制平滑算法对Step 2 得到的航迹进行曲率限制;
Step 4 坡度检查。检查Step 3 得到的航迹坡度是否满足要求,若满足进行Step 5,否则返回Step 2;
Step 5 安全高度限制。检查Step 3 得到的航迹离地高度是否都大于离地安全高度,若满足则输出规划航迹,否则将Step 3的航迹整体上移,使参考航迹最小离地间距等于安全高度。
1.1 地形数据的获取
利用从中国地理信息云获得的DEM 地形数据进行仿真。数字高程模型(DEM)是一个星球表面的三维模型,采用离散的数字数据和高程信息模拟真实世界的地形,适合于构建三维地形[10]。DEM 数据是以地理坐标系统为参考系的。
地理坐标系统是地球表面空间要素的定位参照系统,由经纬度所定义。用地理坐标计算地球表面两点的距离较为复杂,若能将求球面两点间距离转化为求平面两点间距离,不仅能简化计算,也能适应于现在的纸质地图或二维数字地图,所以还需要进行一次地图投影。
UTM 投影就可以实现将球形球体的地理坐标转换到平面位置[11]。UTM 网格系统将地球表面从84°N~80°S 范围内分为60 个带,每个带覆盖6 个经度,并定义180°W 为第一带,然后依次编号。每个带又分为南北两个半球。每个UTM 分带由一个数字和一个字母组成,如UTM 14 N就表示这个分带是北半球102°W和96°W之间的区域。
1.2 坡度限制平滑算法
坡度限制平滑算法的基本思想是:首先计算出参考航迹每一点的坡度值;然后对参考航迹的坡度进行限制,使其不超出正向坡度最大值和负向坡度最小值。
根据沿飞行航向的全程地形高程可以得到一条初始参考航迹序列hi(i=1,2,…,N),N为参考航迹点总数,记参考航迹点水平间距为dx。则第i点对应的坡度为
将飞机最大允许爬升角记为γmax,最小允许爬升角记为γmin,则飞机最大允许坡度kmax和最小允许坡度kmin为:
坡度限制平滑算法具体分为两种情况:
1)正坡度平滑
若ki>kmax,则须减小ki至kmax。为了尽量抬高航迹点,要增大hi-1,调整后的hi-1为
其中,hi-1增大,则ki减小,ki-1增大,此时需检查ki-1是否小于kmax,若不满足,则须从右往左不断平滑,直到所有航迹点坡度都小于kmax。
2)负坡度平滑
若ki<kmin,则须增大ki至kmin,此时要增大hi,调整后的hi为
其中,hi增大,则ki增大,ki+1减小,此时需检查ki+1是否大于kmin,若不满足,则须从左往右不断平滑,直到所有航迹点的坡度都大于kmin。
经过上述坡度平滑后,参考航迹点的坡度ki(i=1,2,…,N)就满足坡度要求了,且可使参考航迹的高度增量最小,这样就得到了经过坡度调整的新航迹。
1.3 曲率限制平滑算法
飞机在垂直平面内运动时航迹曲率ρ与法向过载nz具有式(6)的关系,当v一定时,如果对ρ进行限制,那么nz就能得到限制。
将飞机最大允许正法向过载记为nzmax,最小允许负法向过载记为nzmin,则飞机航迹最大允许曲率记为ρmax和最小允许曲率记为ρmin为:
曲率限制平滑算法的基本思想是:计算参考航迹上每一点的曲率ρ,检查其是否满足曲率要求,若不满足,则调整参考航迹点的高度,使参考航迹点的曲率ρ在最小允许曲率ρmin和最大允许曲率ρmax之间,从而满足法向过载要求。
对于经过坡度限制处理后的参考航迹序列hi(i=1,2,…,N),第i个参考航迹点的曲率为
其中,fi'和fi''分别是一阶中心导和二阶中心导。
曲率限制平滑具体包含两种情况:
1)正曲率平滑
若ρi>ρmax,则须减小ρi至ρmax,此时需增大hi,调整后的hi为
2)负曲率平滑
若ρi<ρmin,则须增大ρi至ρmin,此时需减小hi,调整后的hi为
1.4 安全高度限制算法
除了以上两个限制,飞机飞行还有最小离地安全高度限制,即飞行航迹必须高于地面一定高度,以保证飞行安全。在得到满足坡度和曲率限制的航迹后,将参考航迹与地形高度相减,检查参考航迹离地高度是否都大于离地安全高度,若不满足则需将参考航迹整体上移,上移的距离等于离地安全高度减去最小离地间距。
地形跟随算法充分考虑了飞机进行地形跟随时的机动性能和安全性问题。对不同性能的飞机,只要改变相应的机动性能约束值,即可适用于各种飞机,同时满足地形跟随原则,保证飞行安全。
2 极限告警曲线算法
算法对极限告警点和极限告警曲线进行了定义。极限告警点指飞行器以当前运动状态继续飞行且存在撞毁危险时,在未来飞行轨迹上必须拉起或者规避目标的一个极限位置,否则就会发生撞地危险。极限告警曲线就是在整个飞行阶段,利用每一个航迹点的极限告警点(有可能不存在)拟合而成的一条曲线。极限告警曲线不仅与某一时刻相关,还与整个飞行过程有关,它是整个动态规避过程的静态描述与研究,可以指导近地飞行规避训练。极限告警曲线算法流程如下页图1 所示,具体步骤如下:

图1 极限告警曲线仿真流程图Fig.1 Simulation flow chart of limit alarm curve
Step 1 获取地形数据。根据从中国地理信息云获得的DEM地形数据,利用Global Mapper地理信息软件,可以直接以数字化的方式对区域内的地形进行UTM投影,最后将Xe轴、Ye轴和Ze轴地形数据导出到TXT文件中,以便MATLAB进行读取和处理。
Step 2 航迹规划。利用地形跟随算法对飞机航路进行规划,即地形跟随过程。
Step 3 监测并告警。规划好航路后就可以获得当前航路点的运动状态,近地告警系统按照告警方法持续监测,判断是否存在触地危险,如果飞机存在撞毁危险,则触发告警,否则进行下一规划航路点的监测与告警。
Step 4 极限告警点计算。当告警被触发后,近地告警系统开始计算极限告警点,飞行员必须在该点之前拉起,防止碰撞。
Step 5 极限告警曲线计算。重复Step 3、Step 4的过程直到遍历所有规划航迹点,近地告警系统就可以得到一条极限告警曲线。
2.1 飞机运动模型
算法选择速度、俯仰角和航向角作为飞机运动的控制量(忽略滚转角、迎角和侧滑角)。将选定地形区域的西南顶点设为大地坐标系的原点,大地坐标系在水平面下两个轴的正方向分别指向地球北方和东方,垂直于水平面轴的正方向则指向地心,按顺序定义为Xe轴、Ye轴和Ze轴。速度坐标系的原点为机体的质心,坐标系在机体所在平面下的两个轴分别指向机体前方(即速度方向)和机体右侧,垂直于平面的轴则由座舱盖指向座椅方向,按顺序定义为Xν轴、Yν轴和Zν轴。
速度坐标系(机体坐标系)可看作是由大地坐标系首先绕Ze轴旋转φ角度,然后绕新的Ye轴旋转θ角度,最后绕新的Xe轴旋转γ角度转化成的,以右手定则定义绕轴正向的旋转。设速度矢量从大地坐标系到速度坐标系进行转换时所使用的旋转矩阵是Tνe,则大地坐标系中的速度矢量νeh可通过式(12)变换成速度坐标系中的速度矢量νat。
由于式(13)是正交矩阵,则速度矢量从机体坐标系转大地坐标系的转换矩阵就是Tνe的逆,即
2.2 碰撞模型
算法使用圆柱形碰撞模型,即将飞机周围圆柱形区域CAZ 设为安全区域[12]。当障碍物与CAZ 区域相交时,便认为飞机发生了实际碰撞。设飞机质心(x0,y0,z0)为碰撞模型中心,以HCAZ和RCAZ作为CAZ 区域的柱高和半径。HCAZ和RCAZ的取值受GPS定位精度、飞机高度表精度、飞机速度和人为因素的影响,模型结构如下页图2所示。
图2 圆柱体碰撞模型示意图Fig.2 Schematic diagram of cylinder collision model
CAZ区域中的任一点(x,y,z)始终满足:
2.3 告警方法
在完成路径规划后,每个规划航路点上的飞行状态(位置、速度、方向等)可以直接得到,飞机开始按照规划航迹飞行,告警系统开始判断是否存在撞地危险和是否发出告警。具体的告警方法是:告警系统利用当前飞机状态和飞机运动模型对未来60 s内的飞机位置进行预测,并不断与途经地形高度作比较,如果在未来60 s 内飞机所在高度ht一直满足式(16),则航路安全,不触发告警,否则会触发告警,提示飞行员避撞。
其中,Ht为飞机所在位置(x,y)的地形高度。
2.4 极限告警点的计算
在飞机飞行过程中,如果根据2.3 中告警方法判断存在撞毁危险,触发系统告警,则该时刻飞机的所在位置构成一个告警点。极限告警点的意义是飞机以当前运动状态继续飞行,直到极限告警点之前都可以利用拉起操作成功避障,但是一旦超过极限告警点位置,飞机无法安全避撞。
在告警被触发后,近地告警系统开始计算极限告警点。极限告警点的计算过程是:首先假设飞机以当前运动状态继续做匀速直线运动,以1 s为间隔得到一系列预测轨迹点,接着以这些轨迹点为起点进行垂直拉起避撞过程仿真,当迭代到某个预测位置时,从该点开始垂直避撞飞机会与地面相撞,该点就是极限告警点。
飞机的垂直避撞过程可分为4 个阶段:飞行员反应阶段、拉升阶段、逃逸阶段和恢复平飞阶段[13-14]。飞行员反应阶段是指系统发出警告到飞行员采取避撞行动的延迟阶段;拉升阶段是指飞行员改变飞机飞行参数从而使飞机加速上升的阶段;逃逸阶段是指飞机稳定爬升并避开障碍物的阶段;恢复平飞阶段是飞机由稳定爬升状态恢复到平飞状态的阶段。若飞机上升至指定高度,并且通过前方障碍物后能继续安全飞行,则认为飞机避撞成功。以下算法的建立都基于大地坐标系。
1)在反应阶段,有
其中,Sre是反应阶段结束时的位置;tre为飞行员反应时间,νeh为速度矢量。
2)在拉升阶段,设飞行员在操作过程中保持空速不变且操作动作稳定匀速,则拉起角度Δθ和拉升阶段结束时的位置Spu分别为
其中,ωy为拉起角速度;tpu为拉起时间;φ为航向角;θ0为初始俯仰角。
由于飞机有最大上升速度vzmax的限制,则存在最大俯仰角θmax,拉起时间tpu满足公式:
当飞机完成拉升操作后,记最终俯仰角为θ,则在垂直平面内速度投影的斜率可以表示为
假设飞机拉升结束时的位置为Spu=[xTT,yTT,zTT]T,前方飞行轨迹区域内的规避目标为Stt=[xtt,ytt,ztt]T,该规避目标必须满足4 个条件:一是高度高于飞机碰撞模型最低高度;二是必须处于飞机飞行轨迹区域内;三是与飞机当前位置的高度差和水平距离差的比大于两者之间的地形障碍物与飞机当前位置的高度差和水平距离差的比;四是飞机规避此目标后能继续安全飞行60 s。则最大避障坡度为
若k≥tanθes,则飞机能够避撞成功;反之则飞机无法通过垂直避撞规避障碍物。
3)在逃逸阶段,飞机以θ角匀速爬升,直到飞机达到安全高度,即飞机高度满足zup>ztt+HCAZ∕2,则飞机逃逸阶段结束时的位置为
式中,tup是稳定上升结束时间。
4)在恢复平飞阶段,其运动轨迹方程的求解类似于抬升阶段,则飞机恢复平飞后的位置为
2.5 极限告警曲线的计算
极限告警曲线算法流程如图1所示。在得到所有按照规划航路飞行可能出现的极限告警点后,用插值拟合的方法,可得到一条极限告警曲线,这条曲线包含所有实际计算得到的极限告警点。
在飞机按照地形跟随轨迹进行飞行时,如果当前运动方向的延长线与极限告警曲线有交点,该交点即为该运动状态的极限告警点,必须在该点前进行规避,如果延长线与极限告警曲线没有交点,则说明沿当前飞行方向继续飞行是安全的。
3 仿真验证
3.1 仿真方案
仿真软件使用MATLAB2021b,仿真设定飞机的飞行速度为200 m∕s,安全高度为200 m,最大上升速度为10 m∕s,最小上升速度为-10 m∕s,最大允许法向过载为5 g,最小允许法向过载为-4 g,避撞模型高度为122 m,避撞模型半径为161 m,飞行员反应时间为5 s,拉起角速度为0.174 5 rad∕s,仿真选取介于北纬26°~27°和东经108°~109°之间的30 m 分辨率DEM数据。
3.2 地形跟随仿真结果分析
地形跟随实验仿真结果如图3 所示。从UTM投影后的部分地形数据可以看到,这片区域的山峰跌宕起伏,有山峰也有山谷,符合实际地形情况,也适合验证飞机能否利用地形跟随方式进行低空突防安全飞行。仿真选择(797 827,2 989 880,1 045.94)作为飞机起始状态点,选择(798 356,2 965 950,—),(798 091,2 965 960,—),(797 827,2 965 930,—)作为3个不同的终点,实验对这3 条不同航向的航路进行地形跟随算法的验证。观察图3 可以发现,这3 条航迹不仅满足坡度限制、曲率限制,还满足安全高度的要求,从图4 中的航迹与地形高度差数据也可以看到,在设定安全高度为200 m 的条件下,这3 条航迹的最低高度差都在200 m 以上,飞机的规划航迹是完全安全的,说明地形跟随算法是有效的。
图3 航迹规划示意图Fig.3 Schematic diagram of route planning
图4 航迹与地形高度差Fig.4 Altitude difference between flight path and terrain
在实现地形跟随规划后,就可以预测每个状态点的飞行状态,进而为接下来的告警算法和计算极限告警点提供了数据支撑。
3.3 极限告警点仿真结果分析
下页图5展示了告警算法和极限告警点计算的过程。仿真设定预测时间为60 s,飞机初始位置为(797 827,2 989 880,1 000),飞机航向为-90°,飞机从初始点开始飞行并开启告警系统,从图5 中可以看到在初始位置告警系统就已经被触发,飞机飞行前方(797 827,2 978 278,1 082)的位置处是要规避的山峰最高点,说明告警系统正常工作。
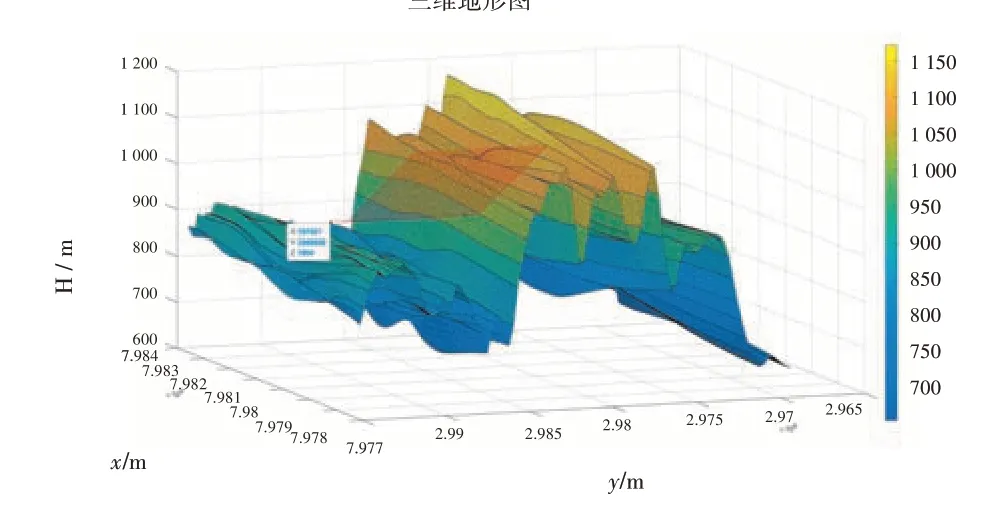
图5 告警算法和极限告警点计算过程示意图Fig.5 Schematic diagram of alarm algorithm and limit alarm point calculation process
图5中的红线表示从不同预测状态点开始垂直避障的过程,分为4个部分,水平直线段表示飞行员反应阶段,斜线段表示逃逸阶段,在斜线段的两个拐角处分别表示拉升阶段和恢复平飞阶段。经过多次的迭代推进,可以发现在飞行运动方向上存在极限告警点(797 827,2 981 860,1 000),从图中可知预留的提前告警时间为41 s,飞机需在极限告警点之前执行拉起操作才能安全避撞,极限告警点算法得到验证。
3.4 极限告警曲线仿真结果分析
图6 是提前告警时间示意图,标出了所有预测航迹点对应的提前告警时间,其中设定不会发生危险情况时的提前告警时间为99 s,从图中可知触发危险告警情况下的提前告警时间最大为51 s,最小为14 s,满足小于预测时间且大于飞行员反应时间的基本要求,说明告警算法合理有效,告警算法得到进一步验证。
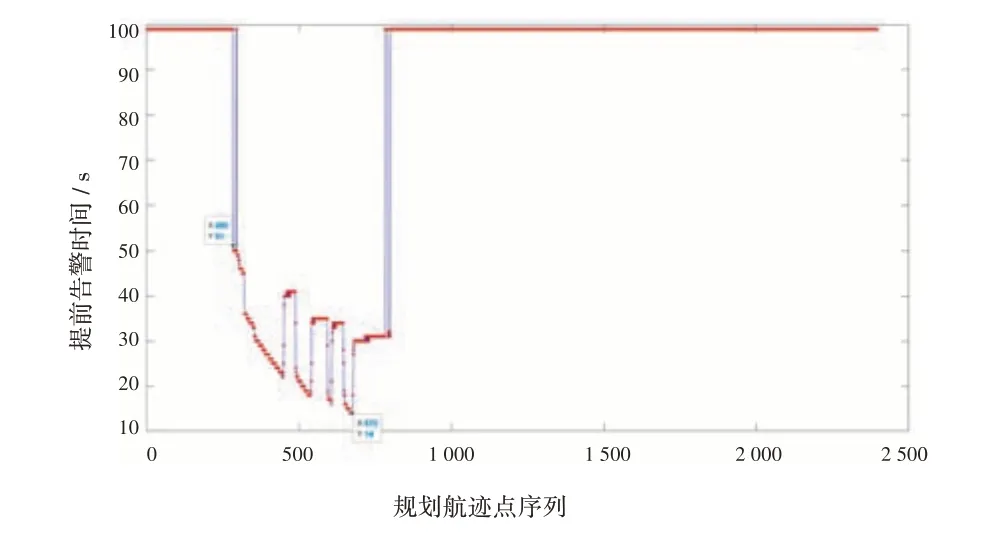
图6 提前告警时间示意图Fig.6 Schematic diagram of alarm time in advance
图7 为极限告警曲线示意图,图中绿色的线为规划航迹,根据图6可知规划航迹点有2 397个。图7 中橘色的点是按规划航路飞行过程中产生的所有极限告警点,每一个点对应一种运动状态的极限拉起位置,根据图6 可知极限告警点一共有505 个,图7 中蓝色的线段就是采用插值方法拟合所有极限告警点得到的极限告警曲线,沿飞机飞行速度方向做一条直线(如图7 中黑色虚线所示),如果这条线与蓝色的告警曲线有交点,该点就是极限告警(拉起)点,如果没有交点,说明该速度方向安全,可以继续飞行。图7 中X-Y平面上的红色*点所在位置对应的是系统告警时刻位置,在该点告警表示飞机沿当前位置的运动状态飞行将遇到危险,提示飞行员注意规避障碍,可看到,飞机在(797 890,2 987 050,—)位置开始出现告警,直到(798 003,2 981 900,—)位置之后的飞行过程才是安全的。

图7 极限告警曲线示意图Fig.7 Schematic diagram of limit alarm curve
4 结论
本文根据飞机基本运动模型和碰撞模型,建立了对应的告警方法,提出了基于地形跟随模型的极限告警曲线计算方法。根据仿真验证结果可知,本文建立的地形跟随模型有效、安全,能够仿真真实飞机的飞行过程;建立的告警算法能够及时、准确给出规避告警提示,并且给飞行员预留了充分的避撞时间;提出的极限告警点算法能够准确给出极限规避位置;提出的低空飞行极限告警曲线计算方法在实际地形应用中可靠有效,能够及时判断告警情况并且提供极限拉起位置,给出合理的极限避撞方案,对于按照固定航路执行常规飞行任务的飞行器具有良好的指导和训练作用。
猜你喜欢
中国港湾建设(2022年12期)2022-12-28
数学物理学报(2022年4期)2022-08-22
青年歌声(2019年12期)2019-12-17
数学物理学报(2019年5期)2019-11-29
城市道桥与防洪(2019年5期)2019-06-26
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
电气化铁道(2016年4期)2016-04-16
河北遥感(2015年2期)2015-07-18
医学研究杂志(2015年4期)2015-06-10