
基于高频脉冲电压注入的永磁同步电机无位置传感器技术研究
2015-07-05 10:42陈长凯曾祥君
电气传动自动化 2015年4期
关键词:永磁同步电机
陈长凯,曾祥君
(长沙理工大学,湖南长沙410004)
基于高频脉冲电压注入的永磁同步电机无位置传感器技术研究
陈长凯,曾祥君
(长沙理工大学,湖南长沙410004)
摘要:以隐极式永磁同步电机为研究对象,通过建立高频信号注入时永磁同步电机的响应模型,研究了基于高频脉振的方波电压注入方法,并利用三角函数运算的方式对转子角度和转速进行估计。相比传统的基于高频正弦电压注入转子位置观测方法,其可以有效减少低通滤波器的使用个数,实现转子角度的无延迟估计,提高系统的控制带宽,加快系统的快速响应性能。通过仿真结果验证了该方法的可行性和有效性。
关键词:永磁同步电机;无位置传感器;高频电压注入
1 引言
永磁同步电机矢量控制系统由于其结构简单、动态性能好、控制精度高等优点,已逐渐成为驱动控制领域的主流[1],然而由于速度传感器的存在,增加了安装和维护的难度,且其易受温度、湿度等条件的影响,使得交流永磁同步电机系统稳定性降低,因此对无速度传感器矢量控制的研究具有重要的现实意义。
对无速度传感器永磁同步电机系统的控制关键在于对其速度与转子位置的提取,其通常可采用以下几种方法实现:一是基于数学模型的直接计算法[2],该方法实现简单,但是过于依赖电机参数,抗干扰性差;二是基于反电动势的转速估算[3-4],该方法较为直接,动态响应快,但因低速时反电动势小,几乎无法测量,故会引起积分零漂问题;三是基于模型参考的自适应算法[5],该算法具有较好的动、静态特性,且具有一定的抗干扰能力,但是模型对电机参数的依赖性高,需及时对电机参数进行在线辨识,增加了算法的复杂性;四是基于状态观测器的速度估算,该方法主要有滑模观测器[6]、卡尔曼滤波方法[7-8]等,在电机高速运行时的估计误差较小,系统响应快,但在电机低速运行时,上述方法均不可用。
为解决低速运行情况下永磁同步电机的速度估计问题,基于高频信号[9]注入的控制方法可以利用永磁电机的凸极特性,进行转子位置的观测,在低速时可以取得良好的性能,且系统鲁棒性强。注入信号主要有高频旋转信号和高频脉振信号两种,前者仅适用于凸极式电机,而后者则可用于隐极式电机。
本文将针对高频脉振信号注入方法,通过分析高频脉振正弦电压信号注入法使用多个低通滤波器而导致估计相角延迟等问题,讨论研究高频脉振方波电压信号注入法,其方波电压信号较之正弦信号可减少低通滤波器的个数,降低转子位置跟踪的误差,增加控制系统的带宽,提高系统的快速响应能力,具有积极的推广应用价值。
2 永磁同步电机的高频信号注入数学模型
为分析方便起见,假设估计出的永磁同步电机永磁体N极位于γδ旋转坐标系的γ轴上,γδ旋转坐标系的旋转速度与估计出的磁链速度一致,γ轴与a相绕组轴线之间的夹角为θˆre,与实际转子磁链位置的夹角为△θ。
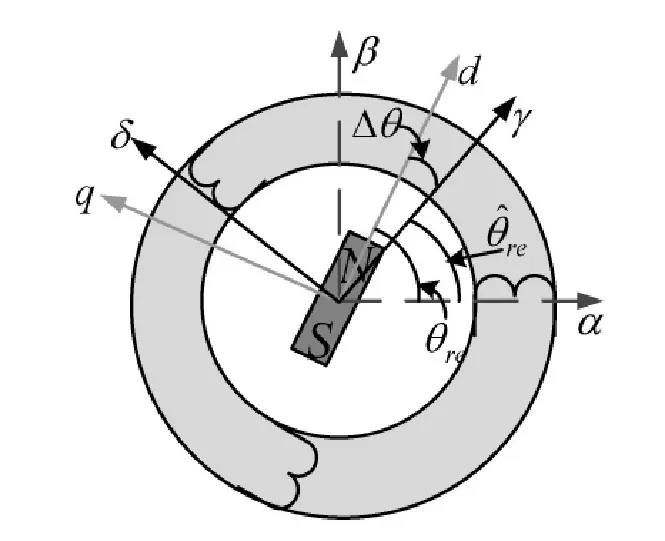
图1 αβ静止坐标系、理想dq旋转坐标系及估计γδ坐标系的对应关系图
各坐标系之间的对应关系如图1所示,将γδ坐标系中的变量投影到dq坐标系中满足如下关系式:

其中x为电压、电流、磁链等任意变量。
在转子参考坐标系中,针对隐极式同步电机[1]本文采用isd=0的控制策略,其永磁同步电机的电压和磁链方程为:
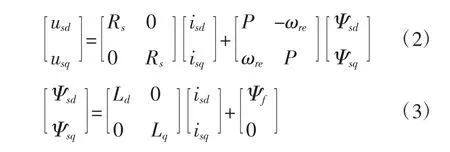
其中usd,usq分别为定子电压的dq分量;Rs为定子电阻;ωre为转子的电角度;isd,isq分别为定子电流的dq分量,Ψsd,Ψsq分别为定子磁链的dq分量;Ψf为转子永磁体的磁链;Ld,Lq分别为直轴和交轴电感;P为微分算子。
由电压方程式(2)可知,稳态时同步电机的反电动势与转速和磁链成正比。在电机转速较低时,如果注入电压频率足够高,且远远大于当前转速,那么反电动势成分所占电压的比例就很小,且不含有高频成分,在高频建模时就可以被忽略。所以,同步电机的高频电压模型可描述为:

其中Rdh、Rqh和Ldh、Lqh分别为dq旋转坐标系下的高频电阻和高频电感。由于电压频率足够高,Rdh<jωhLdh,Rqh<jωhLqh,可以忽略高频电阻的影响。令Zdh=jωhLdh,Zqh=jωhLqh,稳态时的电压模型为:

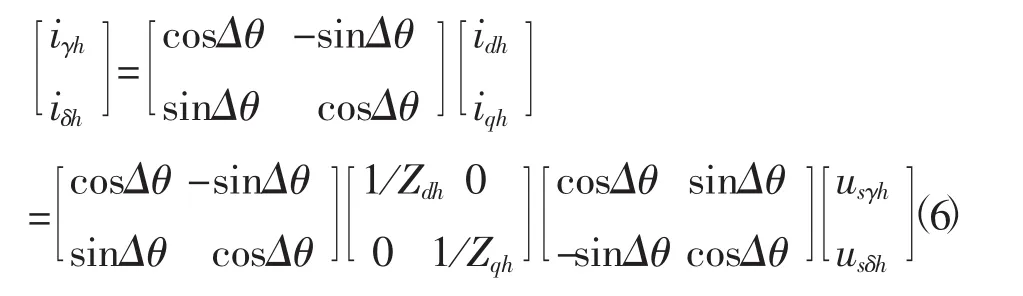
结合式(1)和式(5),可得γδ旋转坐标系下的电流为:

3 高频脉振电压注入方法
3.1正弦电压注入法
在γδ旋转坐标系中注入高频正弦电压方程式为
其中,Vh和ωs<ωh<ωf分别为注入电压矢量的幅值和频率。将上式代入式(8)化简,可得高频电流为

在式(10)中,电流的δ分量与注入信号的同频正弦值sin(ωht)相乘后满足下式

对式(11)进行低通滤波得到关于角度误差正弦值的直流分量,且当△θ≈0时,sin(2△θ)≈2△θ,因此调节式(11)为零,可使得估计角度趋近于实际角度。借助锁相环的思想,利用PI控制器可估计出转子位置和速度大小。具体的控制框图如图2所示。
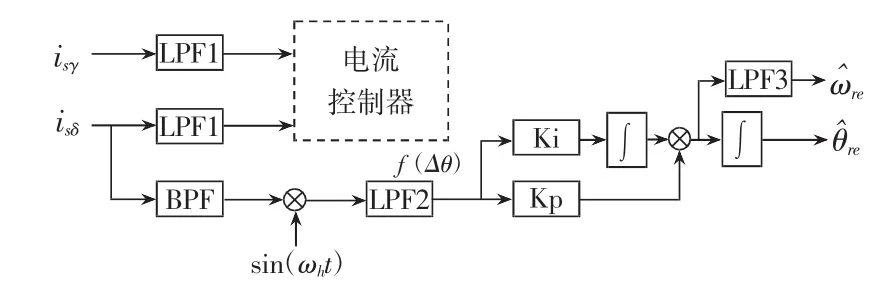
图2 基于正弦电压注入的转速和角度估计框图
如图2所示,带通滤波器(BPF)提取定子电流中的高频电流成分,对δ轴电流分量进行如式(11)所示的操作,利用低通滤波器(LPF2)提取角度误差的直流分量,最后PI控制器输出值经过滤波(LPF3)得到估计角频率,而积分值即为估计角度。
由此发现,该方法中存在多个低通滤波器,其截止频率的大小将会影响观测器的带宽和估计精度。当LPF2的截止频率设置较高时,会引入严重的位置估计噪声,甚至会导致观测器不稳定;但如果截止频率设置较低时,又会引起严重的相位滞后。所以滤波器的截止频率需要折中处理。但为提高系统的带宽,最好减少或去除低通滤波器个数。
3.2方波电压注入法
方波电压注入法以高频脉冲电压信号来取代正弦电压,在αβ静止坐标系中通过三角函数运算来进行角度和转速的估计,摒弃了低通滤波器的使用。具体方法如下:
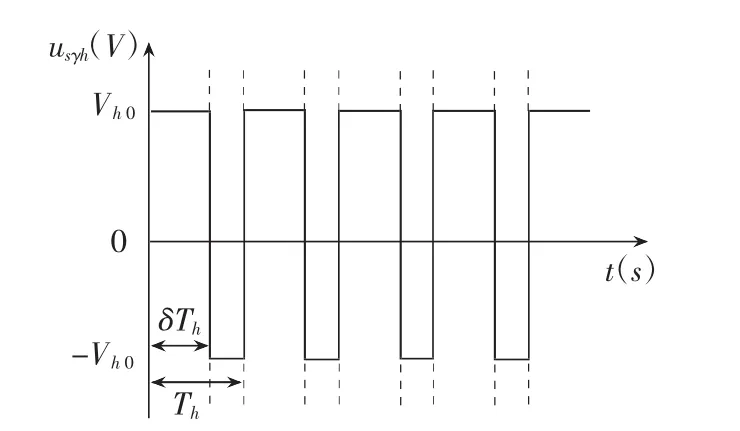
图3 方波电压注入信号波形示意图(0≤δ≤1)
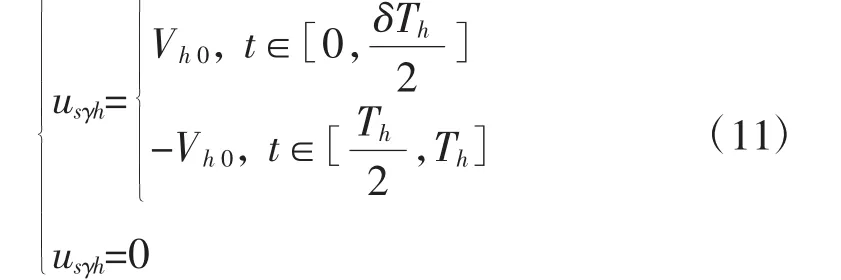
在γδ旋转坐标系中注入周期为Th高频脉冲电压,波形如图3所示,在任意Th内注入电压可表示为:
由图1可知,在αβ静止坐标系下电流满足如下坐标变换:

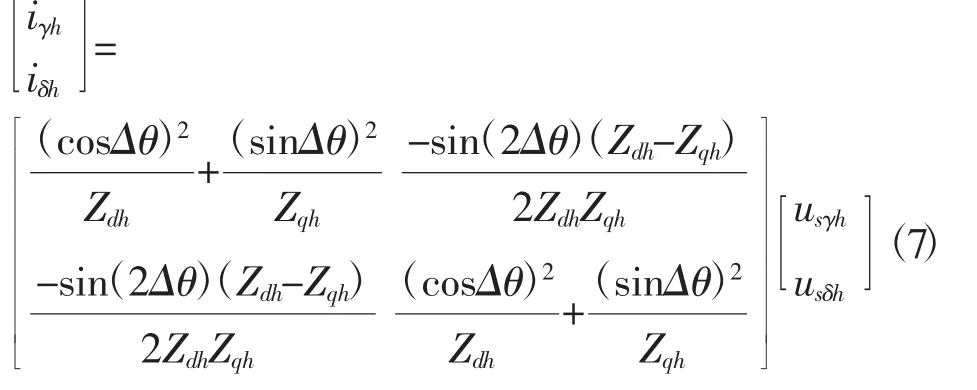
结合式(6)可得:
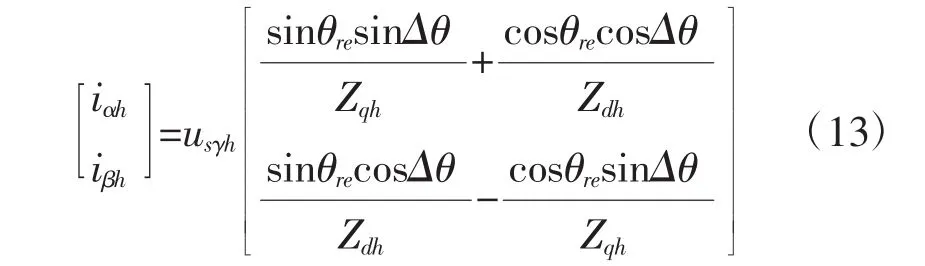
假设估计角度和实际角度完全一致,即△θ≈0,则式(13)可简化为:
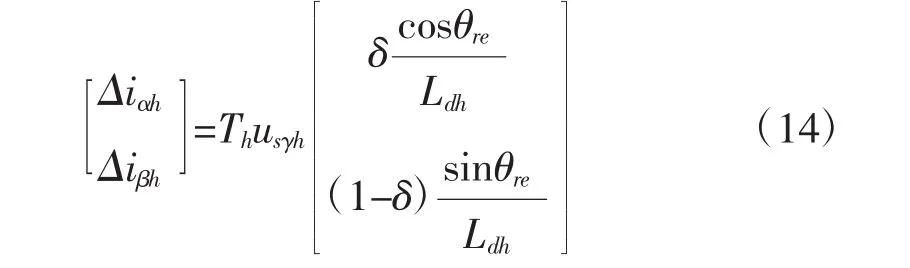
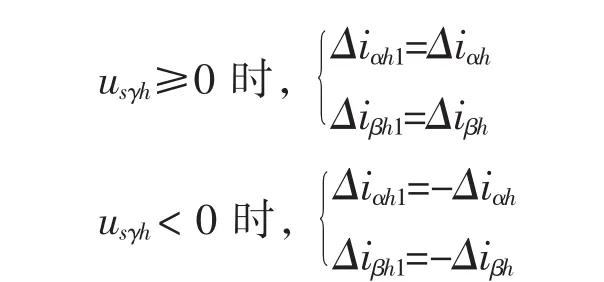
由于注入电压是双极性的,式(14)中的电流同样具有双极性,利用三角函数进行角度估计,需要做去极性处理,即:
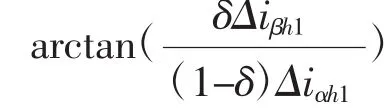
结合式(14)可知,实际的转子磁链角为θre=。因此,在每半个高频周期内,角度估计误差可表示为:

所以利用PI控制器同样可以得到估计的角度和转速值,具体的控制框图如图4所示。
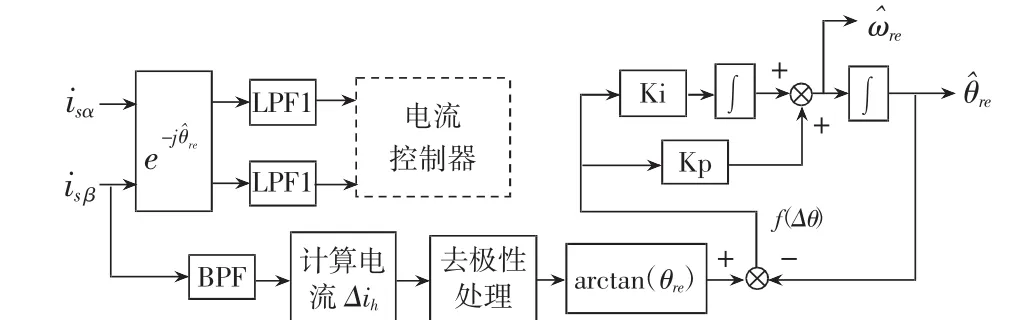
图4 基于方波电压注入的转速和角度估计框图
在上述控制方案中,转子角度误差值可直接获得,而不需要低通滤波器(LPF2)进行滤波;转子频率可直接由PI控制器获得,省去了低通滤波器(LPF3)。可见,在转子角度观测中减少了两个低通滤波器,且每个高频周期内均可计算一次转子角度和角频率值,基本上实现了无延迟的角度跟踪,提高了控制器的带宽,可进一步提高注入信号的频率。
4 仿真实验验证
为验证上述方案的正确性,参考图5所示的整体控制框图,在MATLAB/Simulink平台搭建同步电机系统,开关频率设置为10kHz。主要的电机参数为:定子电阻为0.8750Ω;定子直轴电感为8.5mH;定子交轴电感为8.5mH;转子永磁体磁链为0.175Wb,极对数为4。
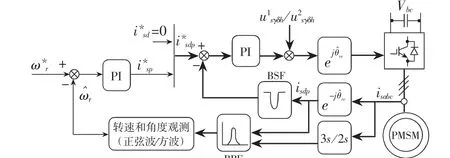
图5 高频电压注入的整体控制框图
正弦电压信号的幅值给定为45V,频率为500Hz。为方便电流控制器前的陷波器设计,此处选择注入高频脉冲信号的频率为5kHz,注入脉冲幅值为10V;采用对称脉冲信号(δ=0.5)序列。给定负载转矩为1N.m,在低速(1rad/s)时对上述两种方案进行仿真,其结果分别如图6、图7所示。
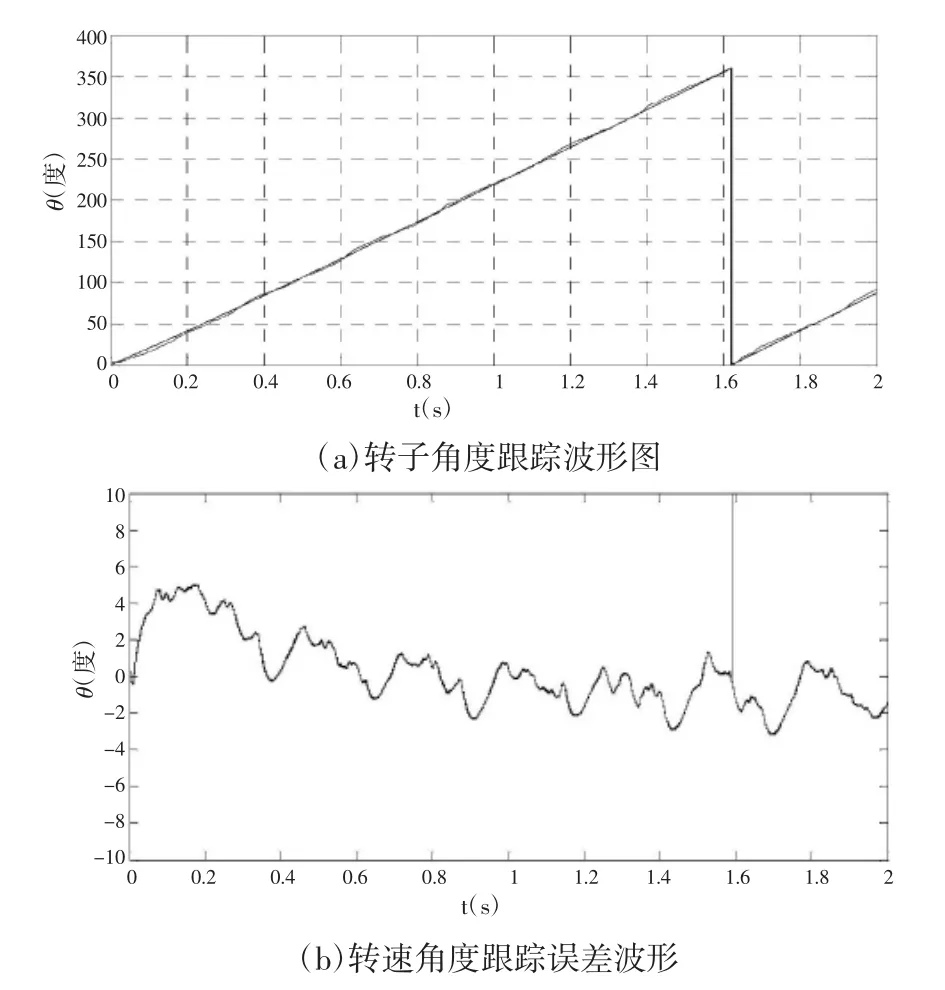
图6 正弦电压注入方法的跟踪波形图

图7 脉冲电压注入方法的转子位置估计波形
由仿真结果可知,上述两种方法在低速时均可实现转子位置的估计,且取得较好的效果。由图6可知,转子位置的跟踪误差在±5度以内,而图7中的转子位置跟踪误差可缩短在±2度以内,小于正弦电压注入的相角误差值。而且在脉冲电压注入方法中的注入信号频率也大于正弦电压注入方法,且前者电流控制器的带宽大于后者。
5 结束语
本文以隐极式同步电机为研究对象,通过向估计的转子参考坐标系中注入高频正弦电压信号和高频脉冲电压信号进行转子位置的观测,解决了基于低速观测性能差的问题。高频脉冲电压信号注入方法避免了正弦信号注入方法中使用多个滤波器带来的相位延迟的问题,利用三角函数运算可以实现转子角度在一个高频注入周期内的跟踪,增加了系统的带宽,提高了系统的快速响应能力,仿真实验证明了该方法的可行性和有效性。
参考文献:
[1]T.M.Jahns,G.B.Kliman,T.Neumann.Interior permanentmagnet synchronous motors for adjustable-speed drives[J].IEEE Trans.Industry Applications,1986,IA-22(4):738-747.
[2]Bimal,K.Bose.Modern Power Electronics and AC Drives [M].Beijing:China Machinery Press,2004.
[3]黄雷,赵光宙,年珩.基于扩展反电势估算的内插式永磁同步电动机无传感器控制[J].中国电机工程学报,2007,27(9):59-63.
[4]Yue Z,Wei Q,Long W.Improved rotor position and speed estimatorsforsensorlesscontrolofinteriorpermanent-magnet synchronous machines[J].Emerging and Selected Topics-IEEE on Power Electronics,2014,2(3):627~639.
[5]J.Lee,J.Hong,K.Nam,R.Ortega,L.Praly,A.Astolfi.Sensorless control of surface-mount permanent-magnet synchronous motors based on a nonlinear observer[J].IEEE Trans.Power Electronics,2010,25(2):290-297.
[6]Salvatore,L.Cupertino,F.Cascella,et al.A new approach to sensorless vector control of SPMSM with adaptive slidingmodeobserver[J].ISIE Industrial Electronics,2002,2(4):489-494.
[7]S.Morimoto,K.Kawamotom,M.Sanada,Y.Takeda.Sensorless control strategy for salient-pole PMSM based on extended EMF in rotating reference frame[J].IEEE Trans.on Industry Applications,2002,38(4):1054-1061.
[8]S.Bolognani.Extended kalman filter tuning in sensorless PMSM drives[J].IEEE Transactions on Industry,2003,39(6):1741-1747.
[9]M.Corley,R.Lorenz.Rotor position and velocity estimation for a salient-pole permanent magnet synchronous machine at standstill and high speeds[J].IEEE Trans.on Industry Applications,1998,34(4):784-789.
曾祥君(1972-),男,汉族,湖南洞口人,教授,博士,长沙理工大学电气与信息工程学院院长,长期从事电力系统微机保护与控制的教学和研究开发工作。

中图分类号:TM351
文献标识码:A
文章编号:1005—7277(2015)04—0001—05
作者简介:陈长凯(1987-),男,汉族,湖北武汉人,长沙理工大学在读研究生,主要从事电机控制等方面的研究。
收稿日期:2015-03-09
Research on sensorless detecting technique of permanent magnet synchronous motor based on high-frequency pulse voltage injection
CHEN Chang-kai,ZENG Xiang-jun
(Changsha University of Science and Technology,Changsha 410004,China)
Abstract:Taking the nonsalient-pole permanent magnet synchronous motor(PMSM)as research object,the responding model of PMSM with high-frequency pulse voltage injection is built,then,the square-wave voltage pulse injection method based on high-frequency vibration is researched,and the angle and rotational speed of rotor are estimated by calculating trigonometric function.Comparing to conventional high-frequency sinusoidal voltage signals injection method for observing the rotor position,it is effective to real-time observe the rotor angle,improve the control bandwidth of the system and accelerate the rapid response performance with less low-pass filter.The simulation results verify the feasibility and effectiveness of this method.
Key words:permanent magnet synchronous motor(PMSM);sensorless control;high frequency signal injection
猜你喜欢
现代电子技术(2017年1期)2017-02-16
汽车工程学报(2016年5期)2017-01-16
计算技术与自动化(2016年4期)2017-01-11
电脑知识与技术(2016年13期)2016-06-29
科技视界(2016年12期)2016-05-25
电脑知识与技术(2016年2期)2016-03-22
电脑知识与技术(2016年1期)2016-03-22
哈尔滨理工大学学报(2015年6期)2016-02-18
哈尔滨理工大学学报(2015年3期)2015-09-21
科技与创新(2015年18期)2015-09-11
