
基于专家PID的直流无刷电机控制系统*
2015-07-05 10:42张浩吴新开
电气传动自动化 2015年4期
张浩,吴新开
(湖南科技大学信息与电气工程学院,湖南湘潭411201)
基于专家PID的直流无刷电机控制系统*
张浩,吴新开
(湖南科技大学信息与电气工程学院,湖南湘潭411201)
摘要:由于直流无刷电机存在时变性、非线性、不确定性、难以建模等特点,采用常规的PID很难达到理想的控制效果。通过专家PID控制理论并结合实践研究,提出一种高性能的速度控制方案。基于多旋翼飞行器常用的无刷电机转速控制这一实验平台,采用编码器测速实现无刷电机的闭环控制。无刷电机速度PID控制器的引入,开辟了多旋翼飞行器电机控制和姿态控制的新思路。
关键词:无刷电机测速;非线性;鲁棒性;专家PID控制
*全国大学生研究性学习和创新性实验计划项目(104-143101)
1 引言
多旋翼飞行器常用的直流无刷电机[1、2]作为驱动平台,该平台由STM32F103RBT6的核心控制器[3]、增量式光电编码器、朗宇无刷电机(2216 1100kV)、好盈天行者无刷电调(40A)、个人计算机、上位机软件构成,其系统结构框图如图1所示。
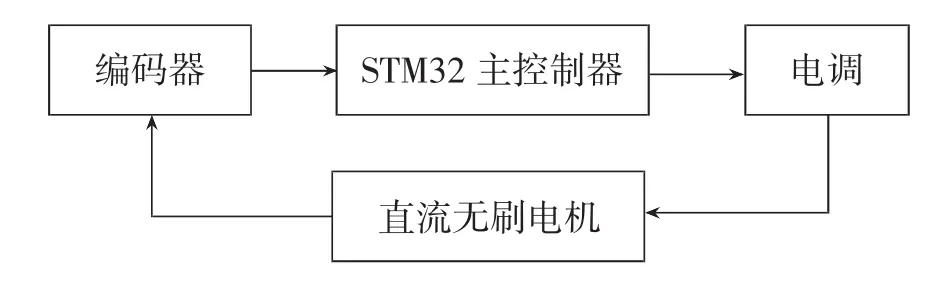
图1 无刷电机控制系统结构框图
STM32F103RX系列控制器最高的主频为72MHz,时间最小分辨达到13.9ns,处理能力1.25 DMIPS/MHz,64K Flash,20K SRAM,拥有3个四通道16位的通用定时器,采用增量式光电编码器。
无刷电机启动后的转速范围约为50到230 转/s。其输入与转速的曲线图如图2所示,横坐标为驱动信号,纵坐标为转速,电机转速和输入的关系是非线性的[4、5]。
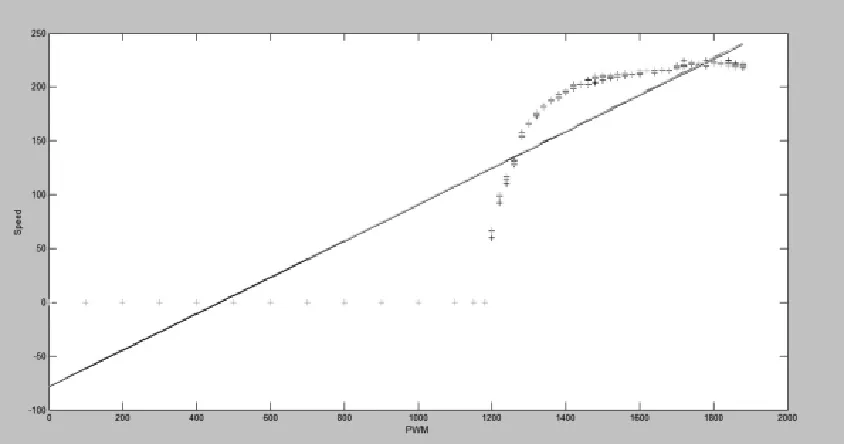
图2 控制量与电机转速关系
上位机采用串口方式和控制器进行双向通信,上位机可以向下位机写PID等参数,下位机也可以将电机转速等信息传到上位机电脑中显示。
本系统选择M/T法测速[6]。若PID控制周期为2ms,则采用10线增量式编码器比较合适。
2 专家控制的基本结构和原理
专家控制(Expert Control)[7、8]是指能够有效地运用专家积累的有效经验和专门知识,通过模拟专家的思维过程,在未知的环境下,解决需要专家才能解决的问题。专家控制属于智能控制的一种[9、10]。专家系统能处理定性的、时变的知识信息,经过各种推理来达到系统的任务目标。专家自适应PID控制器原理图如图3所示。专家系统由知识库和推理机制组成。知识库包含事实集、经验数据、经验公式、规则等。推理机制根据一定的推理策略从知识库中选择有关知识,对控制专家提供的控制算法、事实、证据以及实时采集的系统特性数据进行推理,直到得出相应的最佳控制决策。
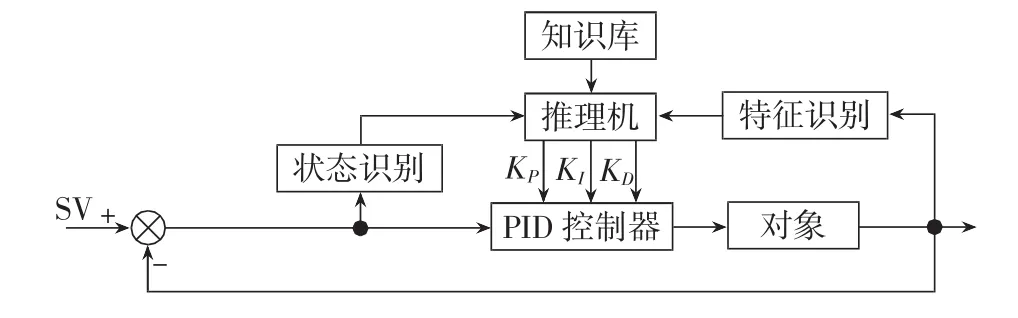
图3 专家控制系统原理图
3 控制算法
3.1基于误差的专家系统
二阶系统单位阶跃响应曲线如图4所示。下面通过对该过程的分析,来讨论基于专家控制的策略。
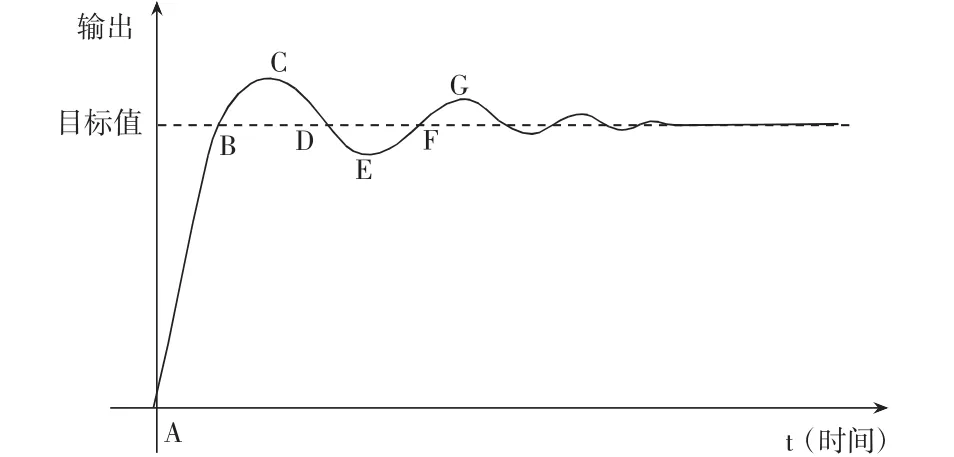
图4 典型二阶系统单位阶跃响应误差曲线
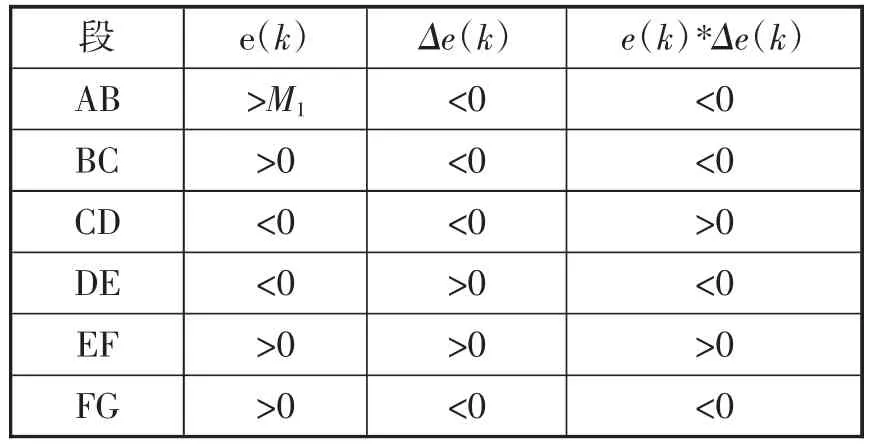
表1 误差曲线分析表
令e(k)表示当前采样时刻目标值与测量值的差值,e(k-1)和e(k-2)分别表示前一个和前两个采样时刻的误差值,则有
Δe(k)=e(k)-e(k-1)
Δe(k-1)=e(k-1)-e(k-2)
选取{e(k),Δe(k),Δe(k-1)}为特征量,根据误差及其变化,可设计专家PID控制器。首先,根据e(k)的所在的区间,可分为三大段:[0, M1],[M1, M2], [M2,∞]。然后,在各大段中分别判断控制器所处的状态,实施不同的控制策略。
(1)当e(k)>M2时,说明误差的绝对值很大。不论误差变化趋势如何,都应考虑控制器的输出应按最大(或最小)输出,使误差绝对值以最大速度减小。但是为了防止被控对象由于惯性导致较大超调,所以加入了积分作用。
u(k)=u(k-1)+kp[1e(k)-e(k-1)]+ki1e(k)
(2)M1≤e(k)≤M2情况:
①当e(k)Δe(k)>0,Δe(k)Δe(k-1)>0时,说明误差在朝误差绝对值增大方向变化,需要加强积分控制,使其朝误差绝对值减小方向变化,控制器输出为:
u(k)=u(k-1)+kp[2e(k)-e(k-1)]+ki2e(k)+kd[2e(k)-2e(k-1)+e(k-2)]
当e(k)Δe(k)>0,Δe(k)Δe(k-1)<0时,说明误差处于极值状态,此时误差的绝对值较大,可考虑实施较强的控制作用:
u(k)=u(k-1)+kp3e(k)
②当e(k)Δe(k)≤0时,说明误差的绝对值朝减小的方向变化,或者误差值保持不变。此时,可考虑撤除积分作用,采取较弱的控制作用:
u(k)=u(k-1)+kp4e(k)+kd[4e(k)-2e(k-1)+e(k-2)]
(3)当e(k) <M1时,说明误差的绝对值很小,此时加入积分,减少稳态误差,不加微分是为了减少噪声的干扰:
u(k)=u(k-1)+kp5e(k)+ki5e(k)
3.2基于转速的专家系统
基于转速的专家系统是将不同转速下的最佳PID参数、公式做成知识库,系统运行时根据不同的转速选择合适的PID参数、公式进行控制,其实质是分段PID。
4 测试结果
4.1基于误差的专家系统
根据上面基于误差的专家系统,通过不断地尝试可得到以下的PID参数:
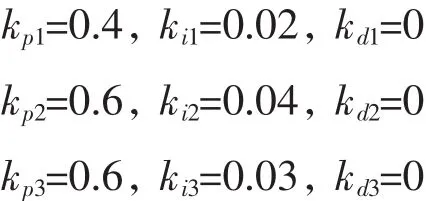
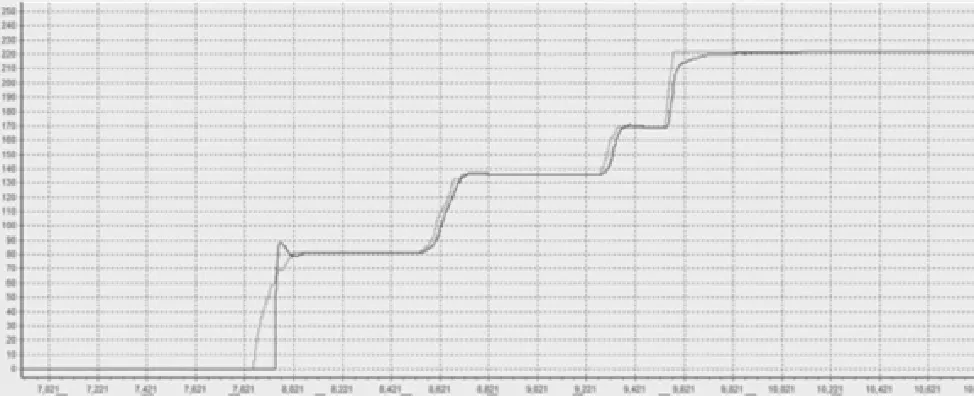
图5 基于误差的专家系统对不同目标值的响应曲线
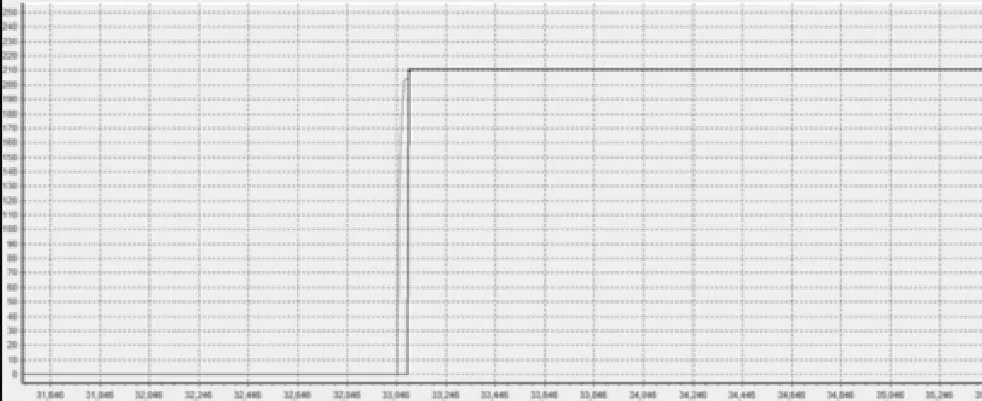
图6 基于误差的专家系统对大目标值的阶跃响应曲线
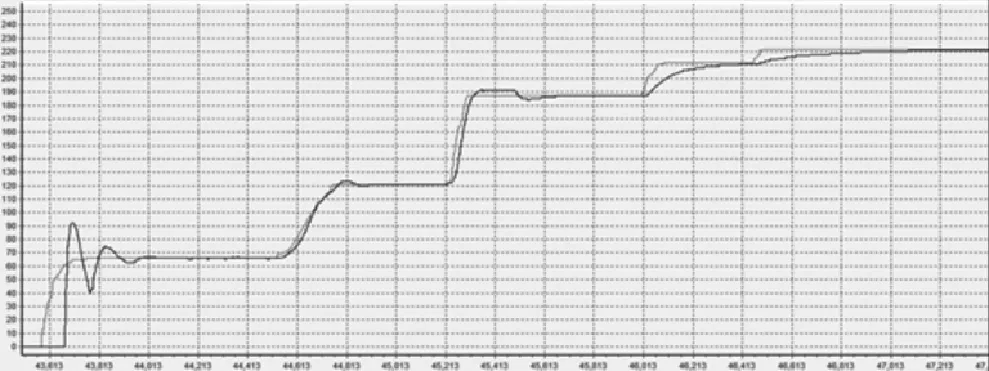
图7 基于转速的专家系统对不同目标值的响应曲线
kp4=0.8,ki4=0.01,kd4=0
kp5=0.5,ki5=0.02,kd5=0
4.2基于转速的专家系统
可将转速简单地分为以下四段:0≤v<80:kp1=0.4,ki1=0.02,kd1=0 80≤v<120:kp2=0.5,ki2=0.025,kd2=0 120≤v<180:kp3=0.6,ki3=0.028,kd3=0 180≤v<230:kp4=0.8,ki4=0.01,kd4=0
5 结束语
利用经验法整定出不同转速v下的PID参数表,通过当前转速来查表获得最佳PID参数。实验中每一个速度段对应的PID控制器结构都是同一个增量式PID,控制时仅改变PID参数,如果优化PID结构,控制器能达到更好的效果。实验得到的对目标值和大目标值的响应曲线,经过专家系统后,PID控制在不同的目标值下都能实现较好的目标跟随,而且对大信号的阶跃响应超调非常小。
在控制对象有很大的时变性和非线性的情况下,一组整定好的PID参数远远不能满足系统的要求。从实验的结果来看,专家PID控制器能够根据知识库在线整定参数,对被控对象的时滞、非线性和时变性[8、9、11]具有一定的适应能力,同时鲁棒性较好,具有相对较好的控制效果。
参考文献:
[1]管于球.直流无刷电机控制系统的研究与设计[D].中南大学,2013.
[2]曹彬.数字式PID控制算法在直流无刷电机中的应用[J].江苏电器,2007,增刊:16-18.
[3]刘军.原子教你玩STM32[M].北京:航空航天出版社,2013.
[4]Debjyoti Chowdhury,Madhurima Chattopadhyay,Priyanka Roy.Modelling and simulation of cost effective sensorless driveforbrushlessDCmotor[J].ProcediaTechnology,2013,10:279-286.
[5]Li Chun-lai,Li Wen,Li Fu-dong.Chaos induced in brushless DC motor via current time-delayed feedback[J].Optik-International Journal for Light and Electron Optics,2014,125(21):6589-6593.
[6]陈伯时.电力拖动自动控制系统(第3版)[M].北京:机械工业出版社,2003.
[7]陶永华.新型PID控制及其应用[M].北京:机械工业出版社,2000.
[8]刘建伟.专家控制系统研究进展[J].微机与应用,2005,(11):4-19.
[9]王耀南.智能控制系统(第2版)[M].长沙:湖南大学出版社,2006.
[10]李名慧.智能PID控制器的设计和应用[D].天津大学,2006.
[11]KuoChung-feng,Tu Hung-min.Anentirestrategyforcontrol of a calender roller system,Part III:Intelligent settlingtimeoptimal control[J].Textile Research Journal,2008,78(1):81-87.
中图分类号:TP273+.1
文献标识码:A
文章编号:1005—7277(2015)04—0014—03
收稿日期:2015-01-05
Brushless DC motor control system based on expert PID
ZHANG Hao,WU Xin-kai
(College of Information&Electrical Engineering,Hunan University of
Science and Technology,Xiangtan 411201,China)
Abstract:The brushless DC motor has the characteristics of time varing, nonliner, uncertainty and hardly modeling, so it is difficult to obtain ideal control effect by using conventional PID control. It is hoped to find a high-performance speed control scheme through the theory and practical research of expert PID. Based on the experiment platform of commonly used brushless motor speed control for multi rotor aircraft, the encoder is applied to measure the rotational speed and realize its closed-loop control. The introduction of brushless motor speed PID controller has opened up new ideas for motor control and attitude control of multi rotor aircraft. Key words:speed measurement of brushless DC motor;nonlinear;robustness;expert PID control
猜你喜欢
科技研究·理论版(2021年22期)2021-04-18
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
系统管理学报(2018年2期)2018-08-13
汽车科技(2016年5期)2016-11-14
科技视界(2016年23期)2016-11-04
科学与财富(2016年28期)2016-10-14
科技视界(2016年24期)2016-10-11
中国市场(2016年29期)2016-07-19
项目管理技术(2016年12期)2016-06-15
