
基于神经元时空整合能力的重载精密机械手传递模式
2015-12-02 01:27罗天洪马翔宇徐向阳
计算机集成制造系统 2015年11期
罗天洪,马翔宇,刘 淼,徐向阳,陈 才
(重庆交通大学 机电与车辆工程学院,重庆 400074)
0 引言
近年来,神经网络在机器人控制中得到广泛的应用。神经网络能够通过在线或离线学习,补偿系统非线性和不确定性的影响,不断改善系统的控制性能[1-3],其自适应控制特点在模糊控制及故障诊断中也起到了一定的作用[4-5]。文献[6]提出了稳定的机械手神经网络控制方法;Sun[7-8]等将机械手神经网络控制推广到了离散时间;文献[9]针对机械手系统的轨迹跟踪控制,提出一种带有前馈和神经网络补偿的机械手控制策略;文献[10]提出一种带有神经网络补偿的机械手比例微分(Proportion-Derivative,PD)控制策略,解决了机械手工业应用中常规的控制策略在处理机械手耦合和非线性特性时控制效果差的问题。近年来,高性能控制器的发展使神经网络在工业上的应用成为可能。因此,有必要研究神经网络在机械手中的应用,尤其是重载精密等特种工作场合。
文献[11]采用带修正项的神经权值更新律和鲁棒控制,为机器人设计了一个多层神经网络控制器,获得了良好的控制性能;文献[12]为水下机器人设计了自适应神经网络控制器,证明控制系统的跟踪误差一致稳定有界;文献[13]为空间机器人设计了滑模神经网络控制器,实现了跟踪误差最终一致有界;文献[14]针对考虑执行器动态的机械臂,提出鲁棒神经模糊网络控制(Robust Neural Fuzzy Network Control,RNFNC)方案应用于复杂的机器人系统,获得了良好的跟踪性能;文献[15]设计的自适应神经网络控制器不但实现了闭环系统所有信号的最终一致有界,而且在稳定的控制过程中实现了部分神经网络权值收敛到最优值,以及未知闭环系统动态的局部准确逼近。以上自适应神经网络控制方案均基于神经网络的通用逼近性展开,对神经网络是否真的逼近机器人系统的未知非线性并没有进行深入探讨。鉴于神经元之间的非线性特点,本文利用神经元的时空整合特点,提出一种基于神经元时空整合能力(Temporal Integration Capability,TIC)的重载精密机械手传递模式,针对机械手的速度、位移、角度的传递进行展开,对于不同时间通过同一突触传入的信息具有时间整合功能,对于同一时间通过不同突触传入的信息具有空间整合功能。采用神经元之间的联系方式(辐散式、聚合式等神经元)对神经元接触的信息进行整合处理,类似于将机械手各关节处传感器搜集的信息进行整合处理,然后将整合结果分散到各个关节处,以对机械手的实际与理论之间的偏差进行补偿。
1 神经元时空整合特点
神经元以细胞体为主体,有许多向周围延伸的不规则树枝状纤维构成的神经细胞,其形状像一棵枯树的枝干,主要由细胞体、树突、轴突和突触(又称神经键)组成(如图1)。树突是树状的神经纤维接收网络,它将电信号传送到细胞体;细胞体对这些输入信号进行整合及阈值处理;轴突是单根长纤维,它将细胞体的输出信号导向其他神经元传递信息的过程为多输入、单输出。神经元对不同时间通过同一突触传入的神经冲动(激励)具有时间整合功能,对同一时间通过不同突触传入的神经冲动具有空间整合功能。

空间整合功能可以等效为机械手的不同关节或不同传感器反馈的信息,控制系统将所收集的信息进行整合处理,调整相关参数,使传递的参数信息可对已达到的位姿要求进行补偿,以达到要求的位姿精度。神经元模型如图2所示。

图中:∑表示求和;θj为阈值;{x1,x2,…,xn}为输入,即其他神经元的轴突输出;n为输入数目;{wj1,wj2,…,wjn}为其他n个神经元与神经元j的突触连接强度,通常称为权重,{wji}可正可负,表示为兴奋型突触和抑制型突触;f(·)通常为一非线性函数,称为神经的激活函数或转移函数;sj为神经元的求和输出,常称为神经元的激活水平;yj为输出。
2 基于神经元时空整合能力机械手的传递模式
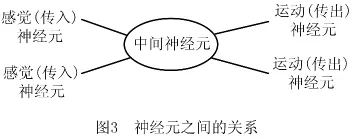
机械手末端的速度与载荷的不同组合对机械手的位置精度存在一定影响,而且末端的速度和加速度对机械手的位置精度也有显著的影响。为提高机械手的定位精度,常采用闭环控制方法,对机械手的输入指令进行补偿修改。该方法与人体机能学中的神经元控制原理一样,神经元包括细胞体、突起两部分,突起又分为树突和轴突,树突接受外界刺激,并将刺激信号传递给细胞体;细胞体对信号进行分析、综合或存储,最终由轴突完成对刺激信号的反应。神经元按照其在反射弧中所处地位的不同,分为传入神经元、中间神经元、传出神经元三种,它们之间的关系如图3所示。
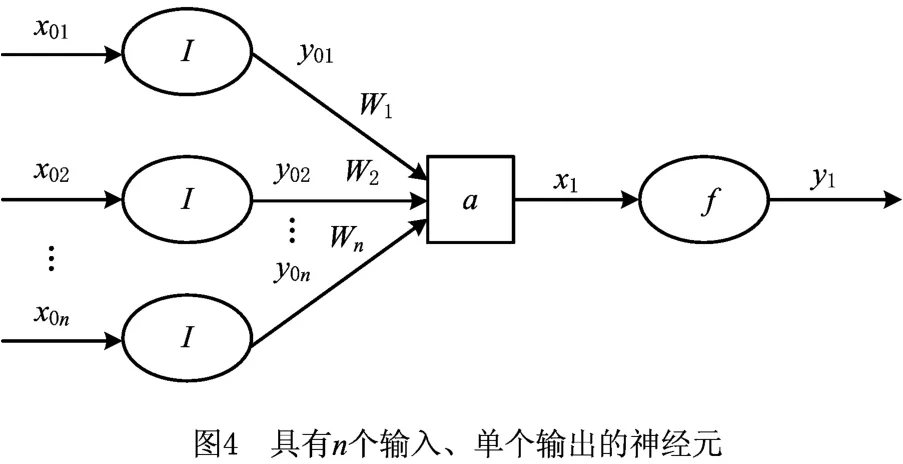
通常一个生物神经元不只有一个输入,具有n个输入的神经元如图4所示。从图4中可以看出,每一个标量输入x0i(i=1,2,…,n)经过预处理函数单元I后,得到的输出为

标有a的方框是输入函数(或激活函数),其输入输出关系为

式中:输入函数a可以是任意的函数;w为权向量;θ为阈值。净输入x1被送入一个变换函数(或传输函数)f,在f中产生神经元的标量输出y1。
根据上述神经元的结构特点,结合机械手的精度误差补偿,求解相似的机械手结构图,如图5 所示。图中多输入单输出样条函数

式中:zj为机械手一个关节的输出,sj(xj)为自变量xj(即单个关节的输入角度、角速度)的函数。图6中的净输入有n个变量,因此有:

式中zs表示最终关节整体的输出部分。


神经元之间的联系主要有聚合式、辐散式、环式、连锁式几种。其中:聚合式为许多神经元通过其轴突末梢,共同与同一个神经元建立突触联系,从而发生总和或整合作用(如图6);辐散式为一个神经元的轴突末梢分支与多个神经元建立突触联系,从而使与其联系的许多神经元同时兴奋或抑制(如图7)。图6和图7中:1~4分别表示关节处不同的传感器(对应于神经元的树突),7表示对传感器(细胞体)的信息进行整合处理,8~11表示细胞体(控制系统)整理后输出的各关节的速度和角速度。

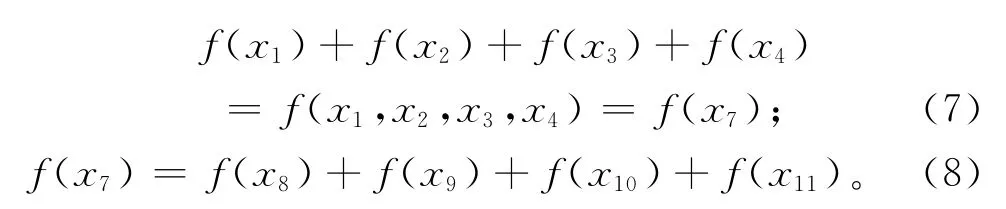
式(7)和式(8)分别表示聚合神经元与辐散神经元所对应的数学模型,其中:f(x1),f(x2),f(x3)和f(x4)分别表示关节处检测的数据信息;f(x1,x2,x3,x4)表示对各传感器的信息综合;f(x8),f(x9),f(x11)和f(x12)分别表示输出的各关节速度、角速度。
神经元之间的辐散式和聚合式结构形式与机械手实现精密运动所需的各部件之间的联系基本一致。鉴于此原理,本文求解了基于神经元TIC 的重载精密机械手传递模式,如图8 所示。图中:1~4分别表示传感器检测的速度、加速度、位置、位姿;5~8分别表示控制系统整合处理后的速度、加速度、位置、位姿等信号。传递模式主要由输入、控制系统、输出三部分组成;输入部分等同于神经元中的传入神经,由传感器检测时间上的速度、加速度和空间上的位置、位姿;控制系统等同于神经元的中间神经元,主要用来整合传感器检测的时间和空间信息;输出部分等同于神经元的传出神经,用来将控制系统(中间神经元)整合的速度、加速度、位置、位姿等信号传递到机械手末端的执行机构。

基于神经元模型传递模式的数学模型为:

式中xi和xj分别表示各个关节在神经元作用前后的输出。
由机械手正向运动学指数积(Product of Exponentialm,POE)公式得

由惯性坐标系{A}中描述的广义刚体速度,得旋量坐标形式为

因此,基于POE公式的机械手瞬时空间速度为

式中:{S}和{T}分别表示惯性坐标系和工具坐标系;gST:Q→SE(3)表示串联机器人正向运动学的映射,其中关节的位形空间θ(t)∈Q,末端执行器的位形空间gST(θ(t))∈SE(3)。
将式(9)和式(10)映射到式(13),分别得到基于神经元模型机械手传递模式的数学模型:


式中Δ˙θ和θ分别表示各个传感器时空整合后对各个关节的补偿值。
3 6自由度重载机械手仿真
为验证上述传递方式的合理性,本文采用6自由度、负载为50kg的重载机械手作为研究模型(如图9),对其进行简化处理后(如图10)求解机械手末端的雅可比矩阵,得出各关节角速度对末端速度的影响因子,为定性分析关节角速度对终端速度的影响程度,只考虑一个关节角速度对终端速度的影响,分别计算关节3的误差前后对终端速度的影响,利用神经元模型对其精度进行补偿,以达到减小误差的结果。


图10中:数字1~6分别表示6个旋转自由度,4和5表示俯仰及左右摆动自由度,X1,X2和X3分别表示杆件长度,当前位形下各个关节对应的运动副旋量坐标如下:


因此,此机器人的雅可比矩阵为

因此,由式(10)得此6自由度重载机械手末端执行器在惯性坐标系{S}中的空间速度

根据机械手末端执行器的瞬间空间角速度,物体速度与空间速度存在如下关系:

因此,机械手末端执行器在x,y和z三个方向上的速度分别为:

式中:sθ1表示sinθ1,sθ1234表示sin(θ1+θ2+θ3+θ4),以此类推(下同)。
为简便地检测基于神经元TIC 的传递模式,本文对机械手末端执行器在z轴方向的速度进行仿真,同时只考虑vz随着关节3 的旋转角度θ3的变化关系,如式(20)所示。θ3~θ6等角度的变化范围为-π/2~π/2,其他参量如下:

同理,分别考虑4~6关节在z轴方向对机械手关节速度的影响,进而综合考虑3~6四个关节对机械手末端速度在补偿前后的影响。

式(20)表示理论计算,式(21)表示在误差Δθ=1rad的前提下,关节3对机械手的终端速度在z轴方向上的影响,Δθ′表示神经元模型补偿之后的误差值(Δθ′=0.01rad)。本文通过角度θ3的理论值、θ3的误差值以及θ3的时空整合值对vz的变化趋势进行仿真;根据式(20)对θ3进行取值并计算相应的vz;同理,角度θ2,θ4和θ5对机械手末端精度在z轴变化的数学模型分别为:
采用与关节3同样的方法,得出关节2,4,5对机械手末端速度在z轴方向的影响趋势,如图11所示。
从图3可以看出,经过时空整合后,机械手末端执行器的速度与理论值几乎接近。
为进一步验证本文模型的正确性和有效性,选取文献[16](如表1)进行对比实验(本文只考虑关节2对机械手末端速度在z轴上这一影响因素)。


由式(23)得

从文献[16]中选取0~3 000ms的数据如表1所示,基于TIC 的传递模式,将表1 中选取的数据进行整合处理,反求出其对应的关节角度,根据式(25)对关节引起的误差进行时空整合,计算结果如表1所示,速度变化趋势如图12所示。

表1 机械手末端速度在z轴的速度分量仿真数据
从图12可以看出,经过时空整合后,机械手末端执行器的速度与理论值几乎接近。

4 结束语
为了减小重载机械手末端速度对其位置精度的影响,本文采用基于神经元TIC 的传递模式,将各个关节处时间上的速度变化在机械手空间上进行整合,以减小关节角度、速度对机械手末端位置精度的影响。同时,求解了各个关节速度、角度变化对末端速度的数学模型,并对速度在z轴的变化进行了仿真,比较了时空整合前后的误差。为进一步验证模型的合理性和有效性,从文献[16]中选取一定实验数据进行仿真试验,对TIC 的有效性进行了证明。随着机械手的智能发展,神经网络及细胞等生物学学科会被逐渐融入机器人学科,笔者也会在此方向继续研究,希望将生物学等的理论应用于机器人的动态特性,从而实现机械手的智能化和自动化。
[1]WU Yuxiang,WANG Cong.Deterministic learning based adaptive network control of robot in task space[J].Acta Automatic Sinica,2013,39(6):806-815.
[2]WU Yuxiang,WANG Cong.Adaptive neural network control and learning for uncertain robot[J].Control Theory &Applications,2013,30(8):990-997.
[3]JIA Heming,SONG Wenlong,CHEN Ziyin,et al.Path following controller for mobile robots based on neural network backstepping[J].Journal of Nanjing University of Science and Technology,2014,38(1):27-33.
[4]LIANG Jie,CHEN Li,LIANG Pin.Neural network adaptive control and vibration hierarchical fuzzy control of flexible arm space robot[J].Computer Integrated Manufacturing Systems,2012,18(9):1930-1937(in Chinese).[梁 捷,陈 力,梁 频.柔性臂空间机器人的神经网络自适应控制及振动模态分级模糊控制[J].计算机集成制造系统,2012,18(9):1930-1937.]
[5]GAO Tianrong,YU Dong,YUE Dongfeng.Probabilistic neural network based on adaptive error correction model and its application in failure diagnosis[J].Computer Integrated Man-ufacturing Systems,2013,19(11):2824-2833(in Chinese).[高甜容,于 东,岳东峰.基于自适应误差修正模型的概率神经网络及其在故障诊断中的应用[J].计算机集成制造系统,2013,19(11):2824-2833.]
[6]GUAN Xinping,TANG Yinggan,DUAN Guangren.Adaptive control for manipulator based on neural-network dynamic compensation[J].Control Theory &Applications,2003,20(1):101-104(in Chinese).[关新平,唐英干,段广仁.机械手臂基于神经网络动态补偿的自适应控制[J].控制理论与应用,2003,20(1):101-104.]
[7]SUN Fuchun,SUN Zengqi,ZHANG R J,et al.Neural adaptive tracking controller for robot manipulators with unknown dynamics[J].IEE Proceedings-Control Theory and Applications,2000,147(3):366-370.
[8]SUN Fuchun,LI Hanxiong,LI Lei.Robot discrete adaptive control based on dynamic inversion using dynamical neural networks[J].Automatics,2002,38(11):1977-1983.
[9]WANG Liangyong,YANG Niao.Trajectory tracking control for robotic manipulators endowed with feedforward and neural networks[J].Electric Machines and Control,2013,17(8):113-118(in Chinese).[王良勇,杨 袅.带有前馈和神经网络补偿的机械手系统轨迹跟踪控制[J].电机与控制学报,2013,17(8):113-118.]
[10]WANG Liangyong,CHAI Tianyou.Neural network compensator based PD control of robotic manipulator[J].Proceedings of the CSEE,2009,29(12):110-115(in Chinese).[王良勇,柴天佑.带有神经网络补偿的机械手PD 控制[J].中国电机工程学报,2009,29(12):110-115.]
[11]LFWIS F L,YFGILDIRFK A,LIU K.Multilayer neural-net robot controller with guaranteed tracking performance[J].IEEE Transactions on Neural Networks,1996,7(2):388-399.
[12]YU Jiancheng,LI Qiang,ZHANG Aiqun,et al.Neural network adaptive control for underwater vehicles[J].Control Theory &Applications,2008,25(1):9-13(in Chinese).[俞建成,李 强,张艾群,等.水下机器人的神经网络自适应控制[[J].控制理论与应用,2008,25(1):9-13.]
[13]ZHANG Wenhui,QI Nailiang,YIN Hongliang.Neural-network tracking control of space robot based on sliding-mode variable structure[J].Control Theory &Applications,2011,28(9):1141-1144(in Chinese).[张文辉,齐乃亮,尹洪亮.基于滑模变结构的空间机器人神经网络跟踪控制[J].控制理论与应用,2011,28(9):1141-1144.]
[14]WAI R J,CHEN P C.Robust neural-fuzzy-network control for robot manipulator including actuator dynamics[J].IEEE Transactions on Industrial Electronics,2006,53(4):1328-1349.
[15]WU Yuxiang,WANG Cong.Adaptive neural network control and learning for uncertain robot[J].Control Theory &Applications,2013,30(8):990-997(in Chinese).[吴玉香,王聪.不确定机器人的自适应神经网络控制与学习[J].控制理论与应用,2013,30(8):990-997.]
[16]SONG Yixu,TAN Dalong.Velocity estimation of wheeled mobile robot with inner-sensors[J].Control Theory &Applications,2003,20(4):537-546(in Chinese).[宋亦旭,谈大龙.基于内部传感器的轮式移动机器人运动速度估计[J].控制理论与应用,2003,20(4):537-546.]
猜你喜欢
四川党的建设(2022年8期)2022-04-28
小学生学习指导(低年级)(2020年11期)2020-12-14
作文大王·低年级(2018年10期)2018-12-06
测控技术(2018年12期)2018-11-25
制造技术与机床(2017年9期)2017-11-27
制造技术与机床(2017年4期)2017-06-22
小猕猴智力画刊(2016年5期)2016-05-14
通信电源技术(2016年1期)2016-04-16
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
