
基于MIMU的行人室内导航技术的实现
2016-11-30 09:26刘晓梅张慕远李金凤王庆辉
沈阳化工大学学报 2016年3期
刘晓梅, 张慕远, 李金凤, 王庆辉
(沈阳化工大学 信息工程学院, 辽宁 沈阳 110142)
基于MIMU的行人室内导航技术的实现
刘晓梅, 张慕远, 李金凤, 王庆辉
(沈阳化工大学 信息工程学院, 辽宁 沈阳 110142)
采用微机械惯性测量单元(MIMU),设计一套固定在行人腰部的可穿戴式室内定位导航设备.采用行人航位推算原理(PDR),计算行人行走的步数、步长及方位,实现行人室内定位,解决了GPS导航技术在室内无法使用的缺陷.测试结果表明:系统的平均定位误差低于行进距离的0.74 %,满足行人室内定位要求.验证了系统的有效性和可靠性.
微机械惯性测量单元; 室内定位; 行人航位推算
行人跟踪和导航目前正在被广泛地研究和应用,而行人的大部分出行是发生在室内或者有光线的室内环境中.在这些环境中,由于低信噪比、卫星分布不均和多径效应等原因,全球卫星导航系统无法提供不间断的并可靠的位置信息[1].因此,基于行人航位推算原理(PDR)的自包含方式与可穿戴式传感器得到了应用[2].它不需要任何外部的基础设施支持,是最好的步行导航仪器.这些传感器包括陀螺仪、加速度计、电子罗盘等;将这些传感器集成到行人导航模块上,通过多参数传感器信息融合,提供用于计算行人位置的各种信息.本文设计了一套可穿戴式的微机械电子传感器(三轴加速度计、三轴陀螺仪及电子罗盘)定位系统,实现行人室内定位和航位推算.实验结果证明了算法的有效性以及可穿戴式设备设计的可行性.
1 行人航迹推算的硬件实现
通过对系统功能的分析,系统需要完成信息采集、信息处理和信息传输3部分功能.其中信息采集模块主要是由各种传感器完成行人状态信息(加速度,角速度,航向)和地理信息(磁场强度)的测量;信息处理部分主要完成导航参数的解算和数据融合等导航计算;信息传输主要是向外部其他设备输出计算后的航向、位置等导航信息和测试参数.其系统结构框图如图1所示.行人室内定位硬件系统以微处理器芯片STM32F405为核心.惯性传感器模块包括一个集成了三轴加速度计及三轴陀螺仪的MPU6050、一个三轴的数字罗盘HMC5883L和气压传感器MS5607.陀螺仪、加速度计及数字罗盘相互正交地安装在电路板上.加速度计、陀螺仪通过SPI端口与微处理器芯片进行通信,数字罗盘和气压传感器通过I2C端口进行通信.
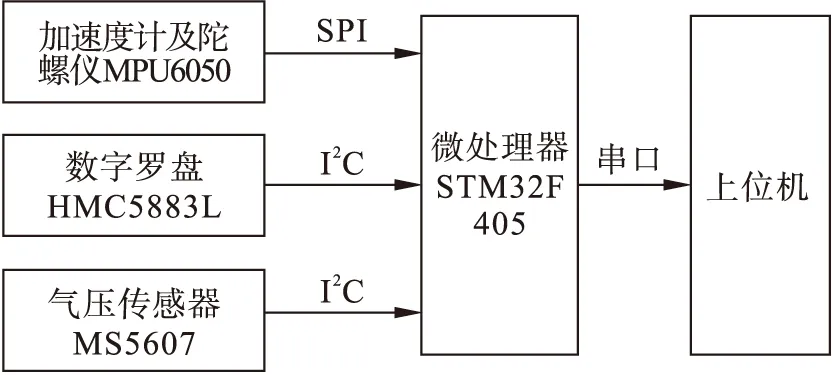
图1 系统结构框图
2 行人航迹推算原理及设计
在行人航迹推算(PDR)算法中包括步态检测、步长估算、方位及位置确定3部分[2-4].行人从已知的初始位置出发,采用步长乘以步数的方法来实现航位推算.那么在行人正常行走时,用户的位置可以用下面的方程来估计[5-6]:
E1=E0+S(t0)·cos(α0(t0))
(1)
N1=N0+S(t0)·sin(α0(t0))
(2)
其原理图如图2所示.在东偏北坐标系中,k表示行人行走的步数,E表示东方向坐标,N表示北方向坐标,S为步长,α表示行人航向角度.

图2 航迹推算原理图
根据行人航迹导航(PDR)原理,设备固定在行人的腰部.由此得到行人航迹检测的流程如图3所示.

图3 航迹推算流程图
利用行人步态的运动生理学特性,参照传统步频探测和步长估计方法,设计一种基于加速度信号的集成了滑动窗口(Sliding-Window)、过零点探测(Zero-Crossing)和峰值探测(Peak Detection)三种方法的步频探测算法,实现行人跨步探测和步长估计;通过陀螺仪与数字罗盘在频域上的互补特性,利用互补滤波器,将传感器数据进行融合,采用航向姿态参考系统(AHRS)[7]得到行人的方位角.
3 实验与结果
为了验证航迹推算算法的有效性,在沈阳化工大学6号实验楼前的广场上,用米尺画一个长约为30 m,宽约为20 m,总长为S=104 m的矩形,实验者沿着矩形的边沿行走.实验分别进行了顺时针走5圈和逆时针走5圈,行走速度为行人正常行走速度,约为1 m/s.图4显示了实验者一次顺时针行走5圈的航迹结果,一共进行了5次顺时针和逆时针行走实验.

图4 在x-y平面的一次测试
在x-y平面内的绝对位置误差计算公式为:
(3)
其中:xe为x方向的绝对误差,ye为y方向的绝对误差.同理,可以计算出x-y平面内的相对误差,其计算公式为:
(4)
其中D为进行距离.
在表1和表2中分别列出了每次试验的实验数据和这些实验位置的绝对误差和相对误差.其中矩形的长和宽为米尺测量距离,测试距离由设备输出的x-y坐标计算得出.

表1 x-y平面顺时针步行的位置误差

表2 x-y平面逆时针步行的位置误差
从实验结果可以看出:顺时针步行定位的平均相对误差为0.74 %,5次试验中最大相对误差为1.09 %;逆时针步行定位的平均相对误差为0.35 %,5次试验中最大相对误差为0.59 %,表明系统具有较好的定位精度,方案可行.误差主要来源于基于微机械加工技术的惯性传感器的测量精度.
4 结 论
通过系统平台的硬件设计和软件设计,实现了行人室内航迹定位.测试结果表明:系统的平均定位误差低于行进距离的0.74 %,满足行人室内定位的要求.验证了系统的有效性和可靠性.由于行人行走过程的复杂性,只研究了行人在正常步速行走状态下的航迹推算,对于行人的平移、后退等步行状态还有待进一步研究.
[1] HUANG C L,LIAO Z Y,LIAN Z.Synergism of INS and PDR in Self-contained Pedestrian Tracking with a Miniature Sensor Module[J].IEEE Sensors Journal,2010,10(8):1349-1359.
[2] 陈伟.基于GPS和自包含传感器的行人室内外无缝定位算法研究[D].合肥:中国科学技术大学,2010.
[3] 宋敏,申闫春.室内定位航位推测算法的研究与实现[J].计算机工程,2013,39(7):293-295.
[4] 裘昕,朱林.行走航迹推算技术的研究[J/OL].[2012-09-22].http://www.docin.com/p-486462243.html.
[5] CHEN W,FU Z Q,CHEN R Z,et al.An Integrated GPS and Multi-sensor Pedestrian Positioning System for 3D Urban Navigation[DB/OL].[2014-06-05].http://ieeexplore.ieee.org/xpl/articleDetails.jsp?arnumber=5137690.
[6] 孙作雷,茅旭初,田蔚风,等.基于动作识别和步幅估计的步行者航位推算[J].上海交通大学学报,2008,42(12):2002-2005.
[7] 梁延德,程敏,何福本,等.基于互补滤波器的四旋翼飞行器姿态解算[J].传感器与微系统,2011,30(11):56-58,61.
Pedestrian Dead Reckoning System Based on MIMU
LIU Xiao-mei, ZHANG Mu-yuan, LI Jin-feng, WANG Qing-hui
(Shenyang University of Chemical Technology, Shenyang 110142, China)
A wearable sensor is based on the micro inertial measurement unit(MIMU),which is fixed at the waist of human body.This system is useful in GPS-denied environments.The self-contained sensors measure the step-length and heading of the pedestrian to achieve the positioning.The test results illustrate that the system positioning error is less than 0.74 % of the total traveled distance,which meets the pedestrian positioning requirements.The effectiveness and reliability of the system is validated.
micro inertial measurement unit(MIMU); indoor location; pedestrian dead reckoning(PDR)
2014-07-07
刘晓梅(1964-),女,辽宁锦州人,副教授,主要从事智能测控技术与装置的研究.
2095-2198(2016)03-0271-04
10.3969/j.issn.2095-2198.2016.03.017
TP274
A
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
百科探秘·航空航天(2017年9期)2017-12-31
中国惯性技术学报(2017年1期)2017-06-09
作文·初中版(2017年2期)2017-03-06
山东工业技术(2016年15期)2016-12-01
光学精密工程(2016年5期)2016-11-07
系统工程与电子技术(2016年7期)2016-08-21
探测与控制学报(2015年4期)2015-12-15
新闻传播(2015年9期)2015-07-18
导航定位与授时(2014年2期)2014-04-27
