
履带式联合收割机转向机构的结构特点及发展趋势
2018-04-12 00:55李耀明朱磊华
农机化研究 2018年4期
马 翔,李耀明,唐 忠,黄 锦,朱磊华
(江苏大学 现代农业装备与技术教育部重点实验室,江苏 镇江 212013)
0 引言
履带式水稻联合收割机是我国水稻收获的主要工具,而随着我国水稻连片种植面积的增加,对水稻收获机械作业效率和承载能力都提出了更高要求。为适应市场需求,水稻收获机械的割幅、喂入量、整机质量都在逐渐增加,转向行驶机构作为联合收割机产品最重要的功率传输部件,其承载能力需要随之增大[1-2]。履带式水稻联合收割机对转向行驶机构的机动性和操控性要求也在不断提高,因此对转向行驶功能的原理研究、机构设计与开发成为提升履带式水稻联合收割机性能的关键之一[3-4]。
本文针对市场现有的转向行驶机构,对静液压转向行驶机构与液压机械结合转向行驶机构进行归类综述并阐述各种机构的工作原理及结构特点,讨论了转向行驶机构的发展趋势。
1 履带式联合收割机转向行驶机构特点
履带式联合收割机一般是在含水量较高的农田里工作,采用履带式结构可以增加接触面积,提高整机通过性。传统的履带式联合收割机转向行驶机构采用离合器机械变速箱转向机构,随着收割机整机功率的不断增大,该机构存在操作复杂、工作效率低等问题,已经不能满足市场的需求[5]。随着机电一体化、液压新技术的不断更新,提高了转向行驶机构的工作性能[6]。履带式联合收割机转向行驶机构引入液压技术,实现了前进速度和左右履带速度的无级调节,提高了整机的机动性,使可靠性高、性能优良、工作效率高的转向行驶机构成为可能,因此液压技术在履带式联合收割机上得到了普遍应用[7-10]。根据液压件与机械变速箱的不同组合方式,可将转向行驶机构主要分为静液压转向行驶机构和液压机械结合转向行驶机构[11-13],如表1所示。

表1 履带式联合收割机转向行驶机构类型
1.1静液压转向行驶机构
静液压转向机构是指发动机驱动液压油泵,将输出的高压油直接输送给驱动轮上低速大扭矩的液压马达,直接控制车辆的直线和转向行驶[14-15]。
现有国产静液压转向机构有中联重科4LZT-6.0ZB型联合收割机的转向行驶机构,如图1所示。该结构将整机驱动轮后置,配以布雷维尼(Brevini)牌液压马达减速机,与前置的液压油泵组成静液压转向行驶机构,实现对车辆的转向行驶控制。该机构的转向行驶原理如图2所示。工作时,通过调节液压泵排量的正、反向来控制液压马达的正、反转,实现履带式车辆的转向功能,而且可以使车辆的转向半径实现连续可控的无级变化。

图1 4LZT-6.0ZB型联合收割机转向行驶机构

图2 静液压转向行驶原理图
静液压转向机构具有良好的传动性能,操作方便,能够实现车辆的无级变速,降低驾驶员的劳动强度,而且具有结构紧凑、质量轻、体积小、承载能力强等优点。采用该机构的收割机比采用机械转向行驶机构的收割机工作效率高10%~30%[16];但是静液压转向行驶系统速度调节范围比较窄,一般适用于速度变化不大的场合[17-18],而且该技术存在噪音大、容易发生泄漏、造价昂贵等缺点,所以并没有在收割机上普遍使用。
1.2液压机械结合转向行驶机构
液压元件结合不同形式的机械变速箱组成的转向机构是在传统的机械变速箱转向系统上,增加液压无级变速器(HST),借此来高效地实现车辆的调速功能,以及履带式联合收割机的分段无级调速[19]。在此机构中的液压泵具有较大的变量范围,只要合理选择速比和设置挡位,便可以得到比较理想的功率输出特性[20]。
1.2.1液压无级变速器(HST)的介绍
液压无级变速器(Hydraulic Static Transmission)英文缩写为HST,采用液压静力原理[21-22]。HST由1个液压泵和1个液压马达组成,辅以控制装置、速度调配装置等,组成无级变速调控系统。使用过程中,通过操作杆调节液压泵的输出液压油的流量和流向实现对液压马达输出转数和转向的调节,即可实现车辆前进、后退的无级调速,是一种比较理想的无级变速装置。
图3是履带式联合收割机常用的HST调速系统。该系统为变量泵与定量马达的容积调速泵,其回路是通过改变泵的排量来实现无级调速。工作时,马达的回油重新回到泵的输入油口,形成了液压油的内部循环系统,构成闭式回路,省去了油箱环节,减少了空气渗入引起的传动效率低下等一系列问题[23]。

图3 HST液压原理图
市场上提供的HST有很多种,主要根据排量来进行区分,排量区间一般为28~52mL/r。其中,48mL/r排量的HST的具体参数如表2所示。
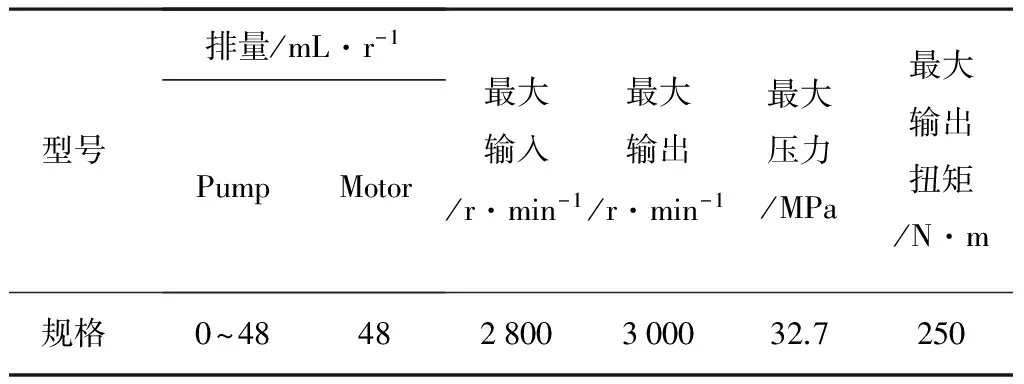
表2 48mL/r排量HST参数
HST的主要工作特点是对外载荷具有自动适应性,实现了传动比的连续改变,能够无级调速和变矩,提高了收割机的燃油经济性和动力性,有效地改善了车辆的操控性和驾驶舒适性[24]。
1.2.2单HST配合传统机械变速箱
HST配合三档变速机械变速箱式转向行驶机构可以改善车辆大半径转向的特性,使履带式收割机具有较好的操控性[25]。HST驱动模式代替了纯机械驱动的离合器和倒挡机构,简化了车辆的转向行驶机构[26]。由于此转向行驶模式的优点突出,已经成为履带式联合收割机一种最常用的直线和转向行驶控制方式[27]。
随着履带式联合收割机发动机功率的增加,机械变速箱的承载功率也在随之变化,配套的发动机功率范围在40~80kW之间。例如,湖州联达LD6(80)型变速箱配套的发动机动力为80kW。图4为LD6型变速箱的实物图,其技术参数如表3所示。

图4 LD6(80)型变速箱

型号单位LD6(80)外形尺寸mm350×400×650发动机功率kW80最高输入转数r/min3000输入方式HST无级变速制动方式湿式摩擦片传动比38.513/23.62/16.432转向结构牙嵌式净重kg110
该类变速箱内部结构基本相似,其传动原理如图5所示。工作原理:发动机动力由皮带输出,传递给HST;由HST进行转速的无级调整后将动力传递给变速箱的动力输入轴,经过换挡变速轴的三联齿轮传递给动力传输轴上;这两根轴上的3对齿轮可以分别啮合,组成高、中、低3挡的速度切换机构,随后动力传输至制动轴上,此轴中间部位对称安装有左右两对带有牙嵌离合的齿轮,通过控制制动拨叉的旋转角度,调整牙嵌齿轮的接合与断开;并在断开的同时,与惰轴齿轮啮合的齿轮会被压向侧边的制动箱内,通过摩擦片制动惰轴上的动力传输齿轮,切断动力的传递,便完成“脱开-制动”这一个连续的操作过程。动力经过惰轴上的两个套体齿轮进行降速增扭后,输入给动力输出半轴上,动力便传递至驱动轮上,完成整车的驱动[28-29]。
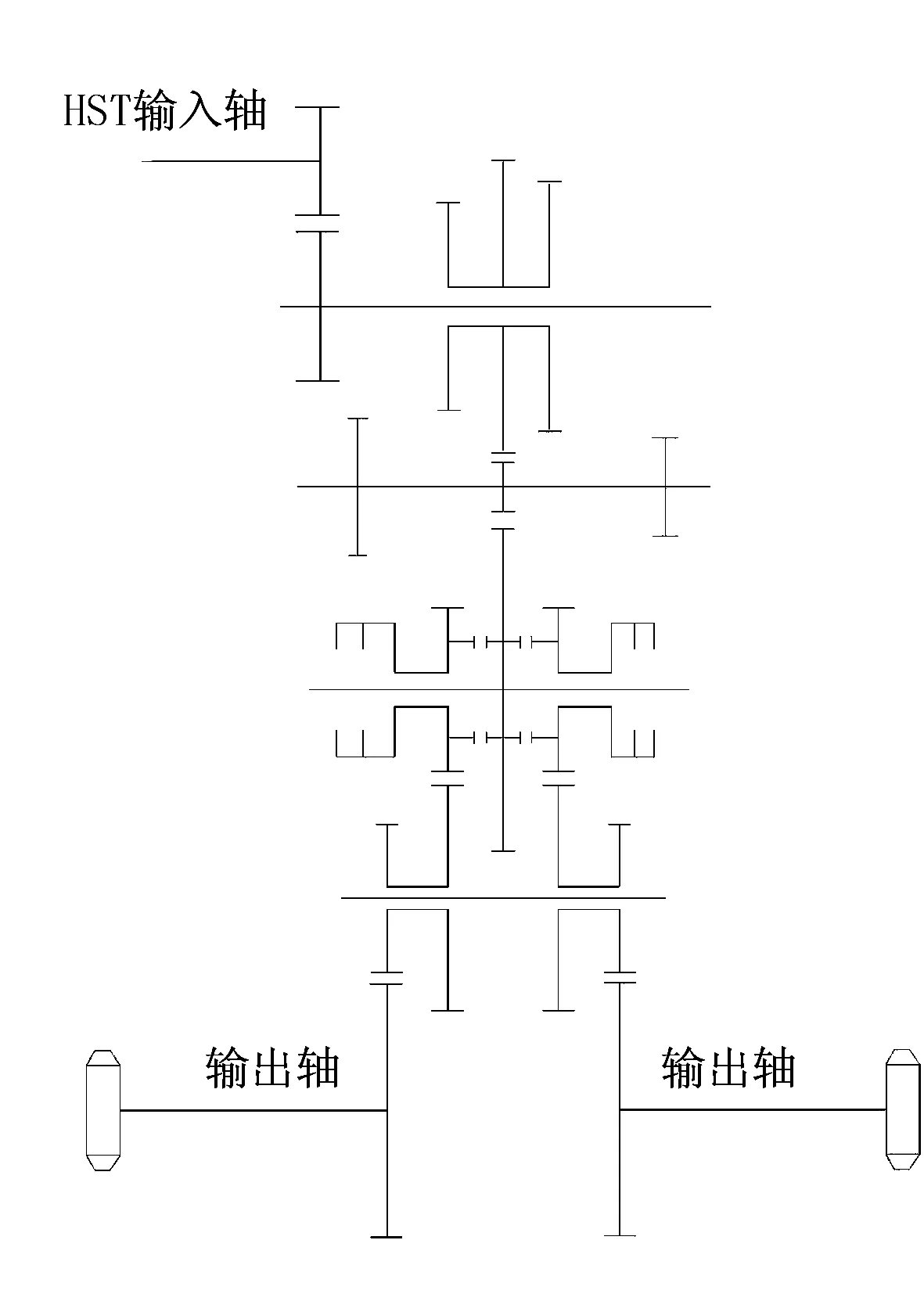
图5 联合收割机机械变速箱原理图
液压无级变速器(HST)与机械变速箱组合成一种新型的转向机构,结构简单,便于维修[30-31],能保证在连续无级转速输出的前提下应用较小的液压元件来提高收割机的输出功率。该机构已成为履带式水稻联合收割机一种主要的转向行驶机构。
1.2.3单HST配合差逆机械变速箱
使用传统机械变速箱在田间进行转向作业时,对土壤产生明显的剪切破坏,进而引起土壤的壅起。针对传统变速箱出现的问题,履带式联合收割机上开始装配差逆式机械变速箱,与HST组成新转向行驶机构。现有的差逆式机械变速箱产品如图6所示[32]。

图6 差逆式机械变速箱实物图
差逆式机械变速箱工作原理如图7所示。其工作原理为:发动机将动力输出至HST,经HST无级调速后,传递至差逆变速箱的3挡变速系统,该系统由换挡变速轴和动力传输轴组成,能够完成高、中、低3挡传动比的直线切换。动力由3挡变速系统传递至带有牙嵌齿轮的牙嵌轴,该轴上左右对称分布两对牙嵌离合器齿轮,通过换向拨叉的作用,将牙嵌离合器齿轮拨开即可实现动力的切断;通过复位弹簧的作用可以将牙嵌离合器齿轮复合,即可实现动力的接合。不切断动力且制动器均处于松弛状态时,可实现车辆的直线行驶状态;在动力切断时,通过不同液压制动器的作用,实现对牙嵌齿轮不同方式的制动,来实现大半径转向、单边制动转向、差逆转向3种不同的转向模式[33]。

图7 差逆变速箱工作原理图
此转向行驶机构较传统机械变速箱,增加两根液压制动控制轴,所以其转向消耗功率约比传统单边制动转向增加 15%左右,但转向半径缩小约为87%,有效地改善了履带式联合收割机的转向性能[34]。
1.2.4双HST配合机械变速箱
此转向行驶系统是采用两台HST控制一台变速箱,来实现对履带式联合收割机的行驶控制。根据两台HST的分工不同,可将此机构分成两种:并置直行HST与转弯HST机构,并置左驱动HST与右驱动HST机构。
并置直行HST与转弯HST机构是由两台HST分别控制履带式联合收割机的直行与转弯功能,用变速杆来控制直行HST,用圆形转向驾驶盘控制转弯HST[35],其结构原理如图8所示。在此操纵机构中,无论收割机是低速状态或者高速状态,驾驶员都可以进行转弯操作。通过改变变速杆的操作角度来控制车辆前行的快慢,通过改变圆形转向驾驶盘的转动角度来变更左右驱动轮的速度比。另外,当变速杆的操作角不同时,即使圆形转向驾驶盘的转动操作角度相同,转弯半径也会不同。

图8 并置直行HST与转弯HST机构原理图
并置左驱动HST与右驱动HST机构是将两台HST分别安装在动力输入轮的左右两侧,通过分半式的机械变速箱,分别控制履带式联合收割机左驱动轮和右驱动轮[36],其机构原理如图9所示。工作时,通过转向行驶控制杆来分别操控两台HST输出的转数和转向,从而实现履带式联合收割机的前后行驶或左右转向。

图9 并置左驱动HST与右驱动HST机构原理图
这两种双HST配合机械变速箱的转向行驶机构将不同的功能进行分别控制,有效地提高了履带式联合收割机的操控性能,可实现原地转弯和急转弯的行驶需求;但此机构对车辆的空间布置也有较高的要求,不容易排布HST与变速箱的相对位置,也需要更改变速箱的基本结构(即需要开发与之匹配的特种变速箱),因此该转向行驶控制机构没有得到充分的实际应用。
2 履带式联合收割机转向机构的发展趋势
2.1静液压无级转向行驶机构
要想实现履带式联合收割机转向半径连续无级变化的可控性能,使用容积式液压泵配合液压马达等液压元件是现实可行的办法。液压转向行驶技术具有低能耗、易控制等优点,能很好地改善联合收割机的性能。液压技术逐渐向制造出功率大且性能优越的液压元件的方向发展,解决了现有静液压无极变速的噪音与泄漏问题,其先进的设计理念、高技术的液压元件都将会在收获机械转向行走系统中得到较快的发展与应用[18]。
2.2复合式转向行驶机构
为了克服静液压转向行驶机构的缺点,目前市场出现多种液压无级变速器(HST)搭配机械变速箱的复合式转向行驶方案。由于HST技术已经成熟,因此机械变速箱成为该机构中最关键的部件。
差逆式机械变速箱最核心的部件为行星齿轮组,其中锥齿轮由于一直处于工作状态,且承受着较大的被动扭矩与载荷,因此经常出现锥齿轮磨损严重的现象,极大地影响着整机寿命;且履带式联合收割机行业的差逆变速箱技术还不成熟,导致HST配合差逆变速箱的转向行驶机构还没有在收割机行业内广泛使用。但差逆变速箱具有转向灵活、效率高和对土壤的剪切破坏少的特点,符合履带式联合收割机行业大割幅、高功率的发展需求,故随着差逆变速箱技术的进步,此类变速箱也将在收获机械行业占有一定比重。
传统机械变速箱是单边制动式变速箱,在转向时需对一侧进行反复制动,且摩擦片的制动作用使得在制动位置的齿轮承受较大扭矩,对齿轮材料的选择和加工工艺上都提出了较高的要求[37]。因此,机械变速箱会着重于提高齿轮的承载能力,改善齿轮与轴等关键部件的加工工艺,来解决变速箱的寿命问题,提高变速箱的可靠性。
由于履带式联合收割机割幅、功率和自重均在不断增加,配套发动机功率已经超过90kW,要求机械变速箱有更高的承载能力。因此,变速箱设计理念也将不断改进,对于齿轮的设计将遵循真实的工作啮合时长来分配齿轮的寿命,真正实现所有齿轮的等寿命设计;设计过程也将摒弃纯理论计算设计而是采用理论计算、软件设计、软件力学分析三合一的设计理念,来缩短设计周期,并有效地改善齿轮可靠性问题;对于变速箱箱体的设计也将向着轻量化的发向发展,并且一体式壳体也将取代分半式壳体,克服分半式壳体带来的密封问题和同轴度差的问题,全方位把控高功率变速箱的设计与加工过程,提高可靠性、延长使用寿命。
3 结论
通过对履带式联合收割机转向机构的归类总结,将转向机构分为静液压转向行驶机构、单液压无级变速器配合传统机械变速箱、单液压无级变速器配合差逆机械变速箱、双液压无级变速器配合传统机械变速箱4类,并对4类转向行驶机构的工作原理、结构特点和优缺点进行了分析。
由此可见,静液压转向行驶机构存在造价昂贵、容易发生泄漏等明显的缺陷,限制了此机构在履带式联合收割机行业的发展。液压机械复合式的转向机构仍是履带式联合收割机主要的转向行驶机构,而机械变速箱性能的优良在该机构中起着关键的作用。其中,差逆变速箱由于可以有效地减小车辆转弯半径及对土壤的剪切破坏,将会受到履带式联合收割机市场的青睐。传统机械变速箱也将在设计理念和加工工艺上进行改进,提高变速箱的承载能力和可靠性,来适应履带式联合收割机向大功率方向发展的需求。
参考文献:
[1]邓玲黎,李耀明.我国水稻联合收割机的现状及发展趋势[J].农机化研究,2001(2):4-6.
[2]陈庆文,韩增德,崔俊伟,等.自走式谷物联合收割机发展现状及趋势分析[J].中国农业科技导报,2015,17(1):109-114.
[3]王飙,刘峰,李云伍.我国水稻收割机的发展现状及发展方向[J].农机化研究,2013,35(10):226-229.
[4]王刚,吴崇友,伍德林. 我国通用型联合收割机现状与发展思考[J].中国农机化,2013,34(6):6-8.
[5]吴宗文,谭兵.军用履带车辆转向机构发展综述[J].机械工程师,2007(5):16-18.
[6]柳涛. 液压技术在农业机械中的应用研究[J].河南科技,2011(20):56.
[7]Rydberg K E. Hydrostatic Drives in Heavy Mobile Machinery: New concept and Development Trends[R].Swedish:SAE Transactions,1998.
[8]方志强,高连华,王红岩.履带车辆转向性能指标分析及实验研究[J].装甲兵工程学院学报,2005,19(4):47-50.
[9]马彪. 履带车辆综合传动特性的动态仿真研究[D].北京:北京理工大学,1999.
[10]Hong I T,Fitch E C. Hydraulic System Modeling and Simulation-Compendiums and Prospects[C]//Proceeding of the fourth International Symposium on Fluid Power Transmission and Control (ISFP2003),2003:30-137.
[11]Anh Tuan Le. Modeling and control of tracked vehicles[D].Sydney:The University of Sydney,1999.
[12]荆崇波,魏超,李雪原,等.履带车辆差速转向机构转向过程动态特性的试验方法[J].农业工程学报,2009,25(7):62-66.
[13]曹付义,周志立,贾鸿社.履带车辆转向机构的研究现状及发展趋势[J].河南科技大学学报:自然科学版,2003,28(2):89-92.
[14]吕海杰,韩宏宇,芦磊. 双流传动履带车辆转向运动学模型的建立[J].农机化研究,2008(3):225-227.
[15]孙勇,李文哲.双流传动履带车辆转向机构的研究现状及发展趋势[J].农机化研究,2008(3):235-240.
[16]陈恒峰,郭辉,张学军,等.浅谈静液压技术在农业机械中的应用现状与发展趋势[J].新疆农机化,2016(2):11-13.
[17]吴元道.工程机械静液压传动装置[J]. 液压驱动与密封,2002(4):46-48.
[18]梁荣庆,坎杂,李成松,等.液压传动技术在收获机械中的应用研究[J]. 机床与液压,2012,40(20):152-156.
[19]Yuan Shi Hua,Hu Ji Bin. The Efficiency of Multi Range Hydro mechanical Stepless Transmission [J]. Jorunal of BIT,1998,3(1):13-21.
[20]金文胜,安国军,刘喜海,等.静液压驱动在农业机械行走装置上的应用与发展趋势[J].内蒙古民族大学学报,2001,16(3):252-257.
[21]王意.行走机械液压驱动技术发展大观[J].液压驱动与密封,2000(1):19-28.
[22]钱进.HST性能测试试验台的研制[D].南京:南京农业大学,2011.
[23]官忠范.液压传动系统[M].北京:机械工业出版社,2002.
[24]Mauck.L.D. Piezoelectric hydraulic pump performance[J].Proceedings of SPIE-International Society for Optical Engineering,2001(5):246-253.
[25]赵立策.履带车辆动静液复合转向系统特性研究[D].北京:北京交通大学,2009.
[26]冷树泉.JD7700联合收割机的变速箱[J].粮油加工与食品机械,1979(9):28-31.
[27]高辉松,朱思洪,贺亮,等. 拖拉机动力换挡变速箱和无级变速箱发展现状与趋势[J]. 机械传动,2012,36(8):190-123.
[28]宋华,赵井旭,吴文明,等. 静液压传动技术(HST)在全喂入水稻收割机上的应用[J]. 设计制造,2010,8(2):97-98.
[29]冯江,蒋亦元. 水稻联合收获机单边驱动原地转向机构的机理与性能试验[J]. 农业工程学报,2013,29(4):30-35.
[30]林宇钢,刘丽敏,周益君,等. 4LYWB-33型履带自走式联合收割机变速控制系统设计[J]. 农机化研究,2013,35(3):113-116.
[31]计联岳,张忠兴,黄远达.洋马联合收割机变速箱的使用维护与故障排除[J]. 浙江农村机电,2006(1):9-10.
[32]姜晓春. 履带式联合收割机差速转向系统设计与试验[D].镇江:江苏大学,2015.
[33]朱昊,卢泽民,李耀明.履带式联合收获机械差动变速箱的设计与仿真[J].农机化研究,2014,36(1):99-103.
[34]Bodin A. Development of a tracked vehicle to study the influence of vehicle parameter tractive performance in soft terrain[J].Journal of Terramechanics,1999,36(3):167-181.
[35]洋马农机株式会社.行驶变速装置的操舵机构:中国,97198081.0[P].1999-10-06.
[36]益阳福祥农业装备有限公司. 履带式车辆行走传动装置:中国,201510635268.7[P].2016-01-06.
[37]王赟.联合收割机变速箱工艺革新技术[J].农业与技术,2013,33(8):30.
ID:1003-188X(2018)04-0001-EA
猜你喜欢
内燃机工程(2021年6期)2021-12-10
农民致富之友(2020年20期)2020-07-18
少儿科学周刊·少年版(2020年9期)2020-03-04
少儿科学周刊·少年版(2020年9期)2020-03-04
今日农业(2019年11期)2019-08-15
农民致富之友(2018年7期)2018-05-04
车迷(2017年12期)2018-01-18
制造技术与机床(2017年3期)2017-06-23
创新作文(3-4年级)(2016年5期)2017-05-16
人间(2015年8期)2016-01-09
