
基于遥控的温室喷雾机自适应控制系统设计与试验
2018-04-12 00:52贾卫东欧鸣雄王浩宇
农机化研究 2018年4期
贾卫东,颜 杰,欧鸣雄,沈 跃,王浩宇,董 祥
(1.江苏大学 现代农业装备与技术教育部重点实验室,江苏 镇江 212013;2.中国农业机械化科学研究院,北京 100083)
0 引言
与传统种植方式相比,设施农业具有更显著的经济、社会和生态效益。其中,温室发展迅速,产业日趋壮大,已然成为21世纪最具活力的农业新产业[1]。病虫害防治作为农作物生产过程中的重要环节,离不开高效安全的施药机械。目前,我国的温室施药机具在实现机械化、自动化和智能化方面还有些欠缺,温室空间狭小,环境复杂,施药机具操纵方便性差,绝大多数还依靠人工作业,不仅工效低、劳动强度大、费用高、而且存在较大的施药安全隐患[1-3]。越来越多的国家已经在农业生产中使用温室喷雾机器人,并且融合了变量喷雾技术和精确喷雾技术,不仅降低了劳动强度,而且达到了有效利用农药及减轻环境污染的目的[4]。
在温室生产中,安全、可靠、平稳的运动和准确的路径导航是保证喷雾机器人完成施药作业任务及达到较好施药效果的关键。多年来,围绕温室喷雾机器人的运动控制问题,国内外学者进行了深入的研究,如采用轨道式技术[5]、电磁感应技术[6]、机器视觉技术[7-9]和激光技术[10]等实现定位导航。李良等设计了温室轨道施药机器人系统;宋健等设计了电磁诱导式喷雾机器人导航系统;李明等设计了基于视觉传感器的定位系统;贾世伟等开发了基于激光测距仪的路径导航方法。轨道式技术和电磁感应技术需要分别预先架设导轨、铺设诱导线及磁标等,应用受限且成本高;机器视觉定位算法复杂,实时性差;激光技术定位电路复杂,成本较高。现有导航及运动控制技术存在实现困难、成本过高及容易发生误操作等问题,所以在温室中还远远没有达到实践运用的效果。
本文在温室风送静电喷雾机上,搭载了图像传输系统,并设计了基于无线遥控与沿作物行中心线自适应行走相结合的实时运动控制系统。该系统可在人不进入温室的情况下,根据实时传输的作业环境,实现喷雾机在温室环境里安全可靠平稳的运行,且在施药过程中始终与作物保持近似平行,避免了重喷漏喷等现象。
1 温室智能喷雾机样机
1.1总体结构
所研究的样机是自主设计的温室风送静电喷雾机,包括移动底盘与喷雾系统,主要由施药模块、传感模块、控制模块、动力模块和电源模块组成。其中,超声波与车轮布置示意图如图1所示,总体结构如图2和图3所示。

1、2.前组超声波传感器 3、4.后组超声波传感器 5.避障停车超声波传感器 6、7.驱动轮 8、9.从动轮

1.摄像头 2、5.前组超声波传感器 3、6.驱动轮 4.避障停车超声波传感器 7.从动轮 8.后组超声波传感器图2 温室喷雾机示意图
施药模块包含药箱、微型隔膜泵、电磁阀及喷嘴等。传感模块主要包括5个超声波传感器,分别安装在喷雾机前方和两侧,前方传感器用来紧急避障停车,两侧传感器用来检测车体位置状态,以便于实现沿作物行中心线行走的自适应控制。控制模块主要包括遥控与自适应的两个控制单元且都是基于STM32设计的运动控制器。遥控单元对喷雾机实现远程的运动控制,包括前进、后退、加减速、左右转及启停等功能,并且在作物行间直线行走时开启沿作物行中心线行走的自适应控制功能。动力模块主要采用四轮式结构,前两轮为驱动轮,后两轮为从动轮,所用电机为两套步进电机及其驱动器,其转向则是通过两个电机的差速转动实现。为保证平稳性,电机与驱动轮采用同步带传动结构。

图3 温室喷雾机样机
1.2遥控与自适应控制调节系统及原理
遥控与自适应调节系统主要由控制模块、检测模块及动力模块协调完成。动力模块采用86BYG型减速步进电机及配套的MA860H细分型两相混合式步进电机驱动器,控制信号与步进电机采用共阳极接法,如图4所示。

图4 控制信号共阳极接法
控制信号包括遥控主机的发送信号和超声波传感器所测得的距离信号。从机控制器实时接收及处理控制信号实现喷雾机的运动,由从机控制器给驱动器发出脉冲信号与方向信号,就可以驱动步进电机和车轮以一定的速度与方向转动。本样机车速可以实现0~1.5m/s可调,加减速的步长为0.1m/s。
为了避免一些误动作和偏差,脉冲信号(PUL)、方向信号(DIR)、使能信号(ENA)应满足一定的时序要求。在实际运用中,本设计将使能信号完全悬空,如图5所示。

图5 控制信号时序图
2 遥控与自适应实时控制系统设计
2.1硬件设计
温室智能喷雾机遥控与自适应控制系统采用主从式控制方式,系统基于STM32开发而成,其硬件结构如图6所示。
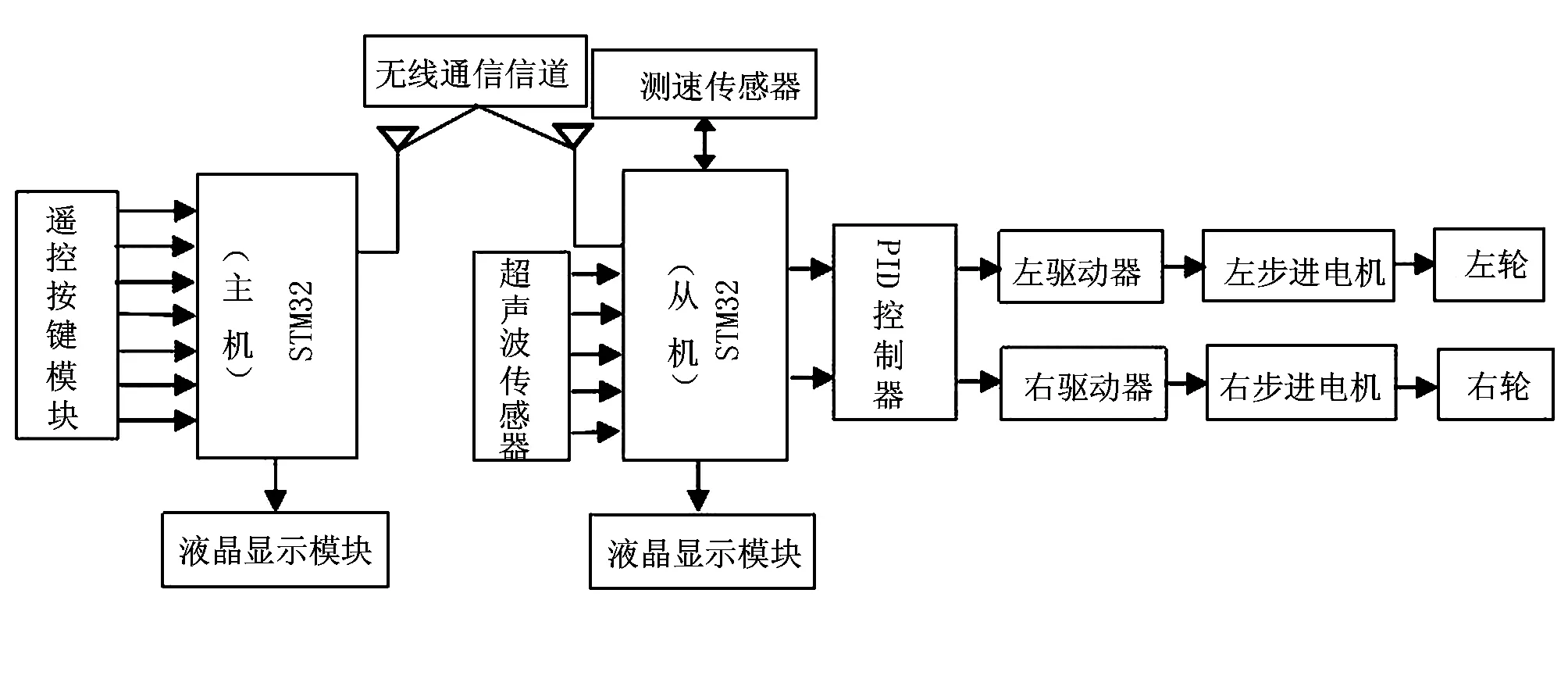
图6 自适应实时控制系统硬件结构示意图
主从控制器采用STM32F103ZET6的103系列芯片,是基于ARM Cortex-M3核心的32 位微控制器,512k片内FLASH并支持在线编程,64k片内RAM,7个定时器,3路AD输入,2路DA输出,高达72MHz的频率,数据、指令分别走不同的流水线,以确保CPU运行速度达到最大化。超声波传感器采用防水型一体化超声波探头,探测范围20~450cm,分辨率0.5cm,盲区20cm。无线模块采用433M的 E30-TTL-100,其嵌入高速低功耗单片机和高性能射频芯片SI4463,采用高效的循环交织纠检错编码,抗干扰和灵敏度都大大提高;发射功率 100MW,具有无线唤醒功能。主机控制器按键模块发出的指令通过无线模块发送给从机控制器,接收到指令后控制步进电机转动完成动作。此外,在作物行间直线行走时遥控从机开启沿作物行中心线自适应行走功能,通过超声波传感器获得的信号,经过从机控制器与PID控制程序处理后,发送出控制信号给步进电机驱动器,从而控制左右步进电机的转速,改变左右轮的车速,调节车体状态,使车体始终沿着作物行中心线行走。整个系统的供电由两组24VDC蓄电池,各个模块所需要的电压可由24VDC电源升降压提供。
2.2软件设计
2.2.1遥控与自适应实时控制主程序
遥控与自适应实时控制系统软件需要实现遥控主机信号的发送和从机信号的接收、超声波传感器距离信号的采集、步进电机控制指令的生成及输出、工作参数输入和系统工作状态显示等功能。控制器主程序流程图如图7所示。
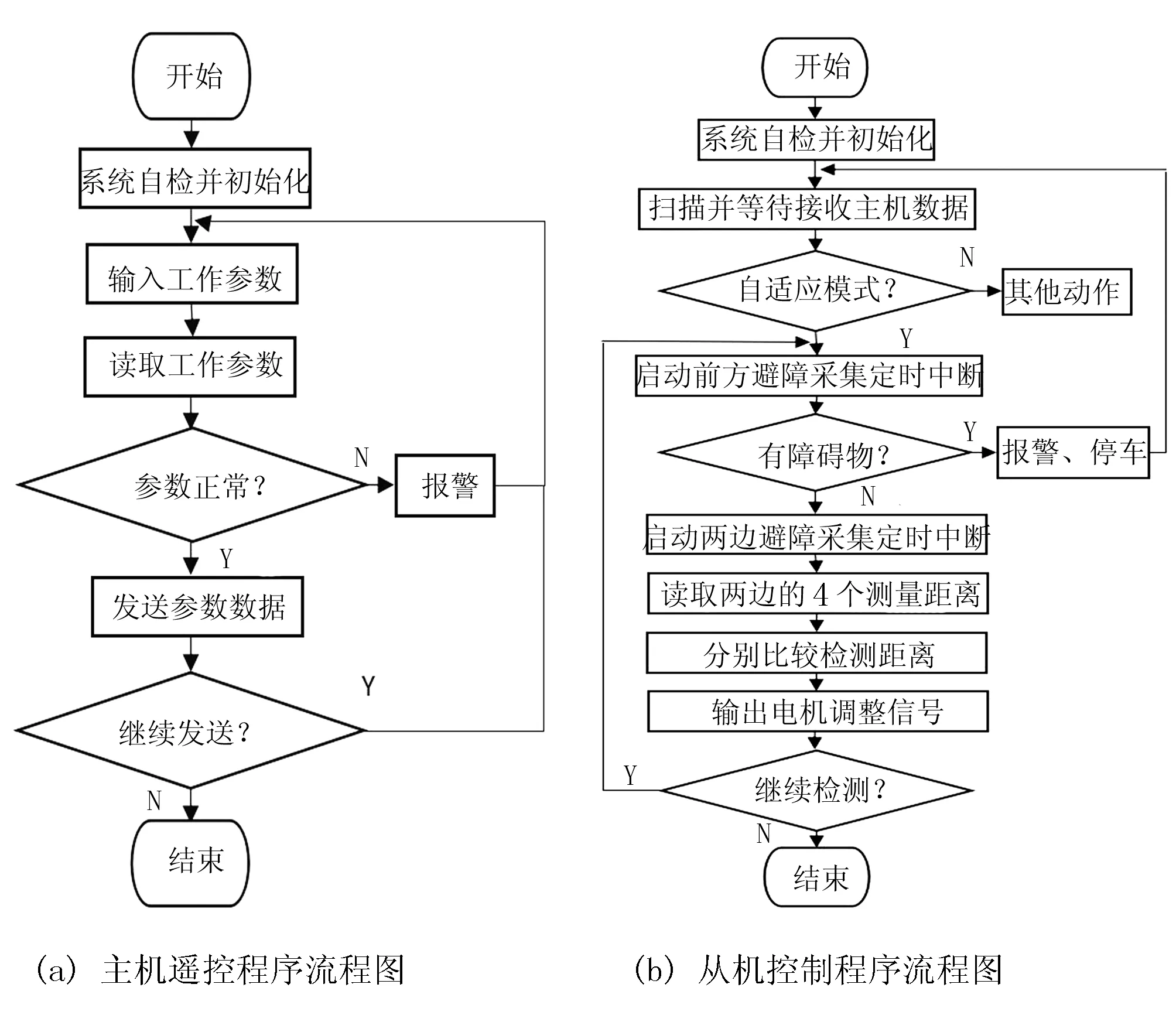
图7 主程序流程图
系统启动后,开始自检并初始化;通过遥控主机按键输入工作参数后,系统读取并判断工作参数是否正常,不正常则重新输入,正常则发送参数数据。从机控制器一直扫描并等待接收主机信号,如果接收到遥控参数信息,立即判断是否开启自适应模式,如果不是则完成指定动作;否则,就立即启动前方避障传感器采集定时中断程序,判断前方是否有障碍物,有则报警停车,无则启动两边避障采集定时中断程序进行两边4个距离的定时循环采集和更新。之后,从机控制器读取最新的两边测量距离并先后进行比较,生成步进电机调整信号的指令,并输出给驱动器。
在喷雾机作业过程中,需要超声波传感器实时检测距离信号并反馈给控制器。本文采用了5个超声波传感器,为避免它们之间的相互影响,控制器将先后分别驱动5个传感器进行距离检测。首先,由前方传感器5判断前方是否有障碍物,当前方1m处有障碍物时,车速立即降为当前速度的1/2;当距离前方0.4m时,报警停车。若无障碍物,则分别启动传感器1、2、3、4检测。此外,由于环境的干扰及超声波传感器本身的测量误差都会对最终的测量结果产生影响,所以对超声波传感器的测量结果进行判断、优化是十分有必要的。本文针对可能存在的测量误差采用去最值平均法。即单个超声波对同一位置处的距离连续检测5次,得到的测量值分别记为X1、X2、X3、X4、X5,并进行比较排序,去掉最大值与最小值之后,对剩下的3个测量值进行求平均值作为一次测量结果。
2.2.3自适应实时控制方法
针对温室道路有障碍物、打滑及运动误差或凹凸型墙体等因素,设计一种沿作物行中心线自适应实时调节控制的行走方法,避免了倾斜碰撞且使喷雾机近似平行于作物,达到较好的施药防治效果。自适应控制系统由5个传感器实时检测,并经过控制器运算比较,再给电机发出运动调整的控制信号。
步进电机所需的调节信号及控制算法可以通过分析不同运动状态及超声波测量结果综合反向推导得出,如图8所示。以左侧情况为例分析行走方案及算法,假设温室道路左侧存在凸出墙体或障碍物及运动误差或打滑引起的车体倾斜。

图8 车体调整状态变化示意图
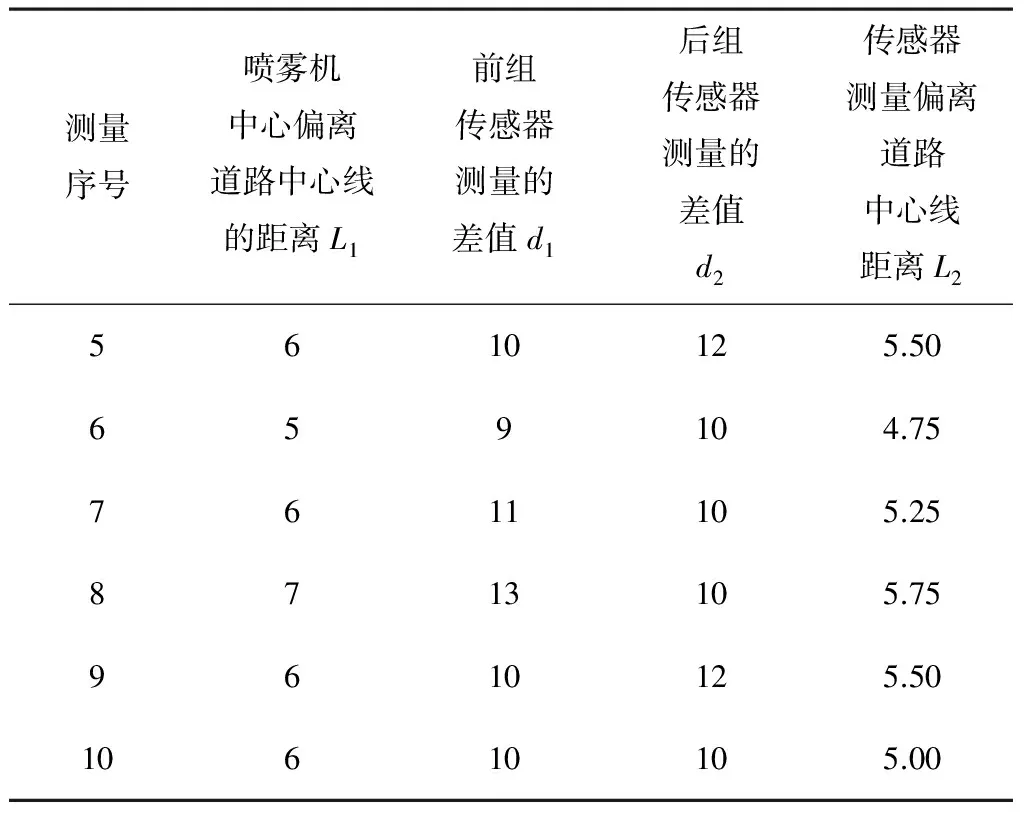
如图8(a)中所示虚线为初始中心线1,D1、D2、D3、D4 分别表示传感器1、2、3、4所检测到的距离值。假设左边有凸出墙体或障碍物,那么车体运动状态只包括不做调整和向右调整(或向右调整后再向左调整达到稳定状态)。结合标号1和2所示,左侧的两个传感器(1、3)没有同时检测到,而是先后经过障碍物,故车体运动状态不需要做调整。其中,当传感器1经过时,检测条件满足D1 如图8(a)中标号3所示,当传感器1和3同时检测到时,则需要向右调整(或向右调整后再向左调整达到稳定状态),这一调整过程包括先调整到新的中心线2行走,然后再回到中心线1行走。对此情况做具体放大分析,如图8(b)所示。调整过程分为前半段和后半段讨论:前半段检测条件满足D1 基于有限元及试验的发动机飞轮模态分 析 ……………………………………… 孟德健,张伯俊,董晓伟(32) 以上是针对一侧进行讨论,另一侧则与之相反。为了简化算法复杂程度便于实现实际应用,对以上判定条件进行综合讨论分类研究,可得到整体自适应实时控制系统的判别条件。 当D1=D2 时,车体运动状态不做调整。当D1 若D3不等于D4,则向右调整(或向右调整后再向左调整达到稳定状态),直至D1=D2。当D1>D2 时,若D3=D4,则不需要调整;若D3不等于D4,则向左调整(或向左调整后再向右调整达到稳定状态),直至D1=D2。 由于以上判断方法存在喷雾机在实际运动过程中循环走折线的问题,不能快速达到稳定的工作效果,在其基础上引入了PID控制方法,设定期望值α及运动过程中实际测量的实时变化值L2,将L2与α的差值作为PID的输入参数,输出实时PWM脉冲,从而控制左右轮的速度,调整车身位置以保证沿中心线附近行走。 此外,由于实际工作因素的影响,为了避免喷雾机在沿作物行中心线行走的过程中发生频繁调节的现象及不能满足平稳性要求,对于以上判别条件中大小的判断存在误差(如检测到的数值不可能完全相等),系统设定了调节阀值δ。例如,当-δ≤D1-D2≤δ时,判定D1=D2。 喷雾机的车体宽0.6m,走廊宽2.2m,行驶速度为0.5m/s,设定阀值δ=10cm。图9为喷雾机在走廊中行走的情况。为了方便测量与记录,在喷雾机尾部中心位置安装了沙漏装置,通过漏细沙的方法记录运动轨迹,并且通过游标卡尺检测每个测量点到道路中心线的实际距离,且当车体调整到沿中心线附近行走(即达到稳定状态)时,读取前后两组超声波所检测距离的差值(即前组传感器1和2的差值),则 d1=|D1-D2| (1) 后组传感器3和4的差值为 d2=|D3-D4| (2) 对两组差值取均值后,再计算出传感器所测量的偏移道路中心线的距离,即 (3) 同时,与实际测量值进行对比。在调整阶段,沿道路每0.5m设置一个测量点,在达到中心线附近时每2m设置一个测量点,共记录10个测量点的数据,分别如表1和表2所示。 图9 走廊环境试验 由表1、表2可知:当喷雾机在沿作物行中心线行走时,能够快速调整运动到中心线附近;当达到稳定状态后,喷雾机中心距离道路中心线的距离平均值为6cm,最大值为7cm。根据前后两组超声波传感器读出的数据,计算出偏移道路中心线偏差值的均值为5.3cm,实际测量值与传感器测量偏移值的误差均值为0.7cm。根据设定的阀值δ=10cm,理论偏移中心线距离为5cm。所以,基本满足控制要求及误差要求。 表1室内场地偏差试验数据 测量序号喷雾机中心距离道路中心的距离L测量序号喷雾机中心距离道路中心的距离L130220314485665768796106 表2稳定状态下的试验数据 Table 2Experimental data of the steady-state cm 测量序号喷雾机中心偏离道路中心线的距离L1前组传感器测量的差值d1后组传感器测量的差值d2传感器测量偏离道路中心线距离L25610125.50659104.757611105.258713105.759610125.5010610105.00 1)提出了一种基于遥控的温室智能喷雾机自适应实时控制系统及算法,利用超声波传感器实时检测温室道路两边距离,且根据设定的阈值进行比较,进而由控制器生成控制指令,使得喷雾机始终沿着道路中心线附近行走。该机器具有成本低廉、操作性好、安全可靠等特点。 2)室内场地试验表明:开启自适应控制系统后,喷雾机在偏离道路的情况下能够快速调整运动到道路中心线附近,使喷雾机近似平行于作物,有利于达到较好的施药防治效果并避免了重喷漏喷现象,且将偏离道路中心线的距离控制在7cm范围内。 参考文献: [1]王丽艳,邱立春,郭树国.我国温室发展现状与对策[J].农机化研究,2008(10):207-208. [2]曹峥勇,张俊雄,耿长兴,等.温室对靶喷雾机器人控制系统[J].农业工程学报,2010,26(2): 228-233. [3]牛雪梅,高国琴,鲍智达,等.基于滑模变结构控制的温室喷药移动机器人路径跟踪[J].农业工程学报,2013,29(2):9-16. [4]莽璐,祁立钧,冀荣华,等.温室自动变量施药系统设计[J].中国农业大学学报,2009,14(4): 114-118. [5]李良.温室轨道施药系统设计[D].太原:太原理工大学,2015. [6]宋健,张宾,张铁中.电磁诱导式喷雾机器人导航系统[J].农业机械学报,2005,36(12):91-94. [7]李明,李旭,孙松林,等. 基于全方位视觉传感器的农业机械定位系统[J].农业工程学报, 2010,26(2): 170-174. [8]沈明霞,姬长英. 农业机器人视觉导航技术发展与展望[J]. 农业机械学报,2001,32(1):109. [9]新忠,韩旭,毛罕平,等.基于最小二乘法的温室番茄垄间视觉导航路径检测[J]. 农业机械学报,2012,43(6):161-166. [10]贾士伟,李军民,邱权,等.基于激光测距仪的温室道路边缘检测与路径导航[J].农业工程学报,2015,31(13):39-45.3 室内场地试验

Table 1Deviation data of indoor ground test cm
4 结论
猜你喜欢
农业开发与装备(2022年7期)2023-01-05水电站机电技术(2022年4期)2022-04-18小学生优秀作文(低年级)(2021年11期)2021-12-06落叶果树(2020年5期)2020-10-22消费导刊(2020年21期)2020-06-30语文世界(小学版)(2019年2期)2019-02-24农机使用与维修(2018年3期)2018-03-23江苏农业科学(2016年1期)2017-05-17浙江理工大学学报(自然科学版)(2015年5期)2015-03-01小天使·一年级语数英综合(2014年7期)2014-06-26
