
烟用自走式起垄定点施肥装置设计及试验
2018-04-12 00:52李国昌吴雪梅殷坤勤张富贵
农机化研究 2018年4期
李国昌,吴雪梅,殷坤勤,张富贵, 陈 胜
(1.贵州大学 机械工程学院,贵阳 550025;2.贵州省烟草公司 遵义市公司,贵州 遵义 563000;3.贵州省烟草公司 六盘水市公司,贵州 六盘水 553000)
0 引言
肥料是烟草生长的基础,其正确使用是形成优质烟叶的关键,而不合理的施用引起的肥料浪费、效益下降、环境污染等一系列问题越来越受到重视。在保证烤烟质量的同时,如何施肥提高肥料使用效率是当前一项重要的课题。
国内的研究人员对施肥机械进行了大量的理论分析和试验验证。张小丽[1]设计了一套旋转耕作机构,可用于播种及肥料深施,在双层施肥旋耕播种机等操作机构播种时同时应用,浅层施肥,并对开沟器和功率消耗进行了分析计算,验证了该装置的可行性和原则上的合理性。邓春岩[2]设计了施肥的小装置,施肥时间短、动荡小、环境污染低,顶杆的仿形效果较好,肥料和清除箱从杆进洞,实现定量施肥作业。李宁[3]等人开发的烟草挖外槽轮式施肥机,施肥机加装凸轮下方,由外槽轮式排肥箱肥料把肥均匀地排入凸轮入土口,挖掘轮顺时针驱动链轮,并带动凸轮;凸轮驱动摇臂,摇臂克服复位弹簧的张力致顺时针摆动,施肥阀向下移动,肥粒落入孔管,从而施肥作业。2BJ-2 式精密播种施肥机的设计者辛莉[4]等人提出,通过施肥驾驶盘旋转、手指尾杆接触及换挡杆带动肥料排放阀的导管被打开和关闭的排肥口和孔施肥,可以适应多种作物栽培要求,通过改变肥料覆盖点的范围,来调整与手指接触的杠杆位置。周舟[5]等人开发了一套施肥量可调、精准施肥,可在不同的温室中自由移动的施肥机,主要由机架、施肥控制系统、混合泵和管道系统等组成,从而实现滴灌施肥和叶面喷施。
但上述机具存在以下问题:一些机械装备挖坑深度浅,挖坑不均匀;施肥不到位和不够定量,造成肥料浪费;拖拉机驱动,结构复杂,成本较高。目前,缺乏结构简单、定点底肥施用、同时适应贵州地貌的烟地小型精准定点施肥机。针对上述情况,本文设计了一款烟用自走式起垄定点施肥机,可以达到起垄、定点施肥(窝施)和节省肥料的目的,进而实现改善烟叶品质目标。
1 总体结构与工作原理
1.1作业要求
自走式底肥深施机定点施肥装置采用一垄一行模式,间距1 100mm;作业对象为贵州山区土地;在旋耕作业完成后,烟苗种植之前,起垄与施肥作业同时进行。烟垄的垄型断面示意图如图1所示。
1.2总体结构
自走式起垄定点施肥机主要由起垄装置、起垄成型装置、定点施肥装置、肥料释放点标记装置及限深轮装置5部分组成。整机结构如图2所示,三维模型图如图3所示。
起垄装置为自走式起垄定点施肥机的主要工作部件之一,它直接对土壤进行切削并推土成垄,从而完成旋耕起垄作业。起垄装置主要由刀轴、起垄刀片及刀座等组成。为了不使刀具夹土且保证刀轴受力平衡,将起垄刀片以双螺旋变螺距的螺旋方式安装在刀轴上,以提高工作稳定性及起垄效率。刀座一端以一定角度焊接在刀轴上,另一端通过螺栓与起垄刀片连接,用来传递动力。

图1 烤烟垄型断面示意图

1.链传动装置 2.肥料箱 3.外槽轮式排肥器组件 4.扶手5.施肥点标记装置 6.侧起垄板 7.限深轮装置 8.旋耕起垄装置图2 起垄施肥装置结构示意图Fig.2 The structure diagram of ridging and point fertilizing apparatus

图3 烟用自走式起垄定点施肥装置三维图
起垄成型装置用来完成起垄、垄型修复及清除沟底残留土壤的作业,将其安装在起垄装置的后面(即已完成土壤旋耕起垄的正后面)。起垄成型装置由左、右两块侧起垄板、两块后起垄板及1块上抚平板组成。上抚平板可以根据垄高要求进行上下调节,左右两块侧起垄板各以一定角度与后挡板焊接。左、右起垄板及上起垄板保证了所切削的土壤随螺旋刀片从两端向中间运输推土成垄。起垄成型装置与起垄刀轴之间保留合适的距离,使其既能保证不与起垄刀轴发生干涉,又能保证起垄质量。上抚平板起到平整垄顶的作用,左右起垄板起阻止沟中的土壤向外运输的作用,后挡板起清除沟底残留土壤并引导其向中间运输的作用。
定点施肥装置主要由料箱、外槽轮式排肥器、导肥管、喇叭形开沟器及锥体开关组成,其定点施肥过程的实现是由盘形凸轮控制的,锥体开关在盘形凸轮的控制下进行规律地开启和关闭的动作,控制肥料进行间断施肥。
肥料释放点标记装置由地轮、叶片、盘形凸轮、齿轮及链条组成,在定点施肥装置施肥完成后,标记装置在施肥点用石灰粉标记,明确施肥位置点,便于对烟苗进行井窖式移栽。整个标记装置通过销轴与排肥器的罩壳连接,并通过自身重力压在已经成型的垄上,通过与土壤的摩擦力驱动自身的转动。地轮设计为有一定容积的圆柱桶,用来盛装石灰粉,来标记施肥点。
限深轮装置的作用是使自走式起垄定点施肥机在工作过程中能处于连续的平稳状态,同时通过升降轮子的高度,可以实现耕深的控制。
1.3主要技术参数
垄底宽度/mm:600(可调)
垄高/mm:250~400(可调)
垄宽/mm:300(可调)
起垄行数:1垄1行
施肥量/g:45~55(每株)
施肥间距/mm:500~600(可调)
施肥深度/mm:150~200(可调)
料箱装肥量/kg:20(可调)
作业速度/m·h-1:2~10
配套动力/kW:6.3
连接方式:直接连接
生产率/hm2·h-1:0.07
垄形状: 梯形
1.3.1主要运动参数的选择
切土节距β和旋耕速比α是自走式底肥深施机定点施肥机参数中的重要参数,该参数的取值是否合理决定了机具的作业质量和作业效果是否符合农艺要求。旋耕刀端点的回转切线速度与机组前进速度之比定义为旋耕速比。样机的设计参照旋耕起垄机的有关计算公式[6-10]。起垄旋耕速比α同样定义为
α=Rω/Vm
(1)
其中,ω为旋耕刀轴的回转角速度,设计中取ω=23.03~47.12rad/s;vm为整机组的前进速度,vm=1.2m/s。
带入数据,由式(1)可得:α=4.22~8.64。
同理,切土节距β定义为
β=2πR/Hα
(2)
其中,H为旋转切削同一面内刀具数量,H=2;β为切土节距(cm)。
由式(2)可得:β=7.99~16.38cm。
由计算出来的切土节距β和旋耕速比α的数值范围分析可知:参数的选择是有效的,并且符合农机和农艺的要求[10]。
旋耕机器的作业中,有关经验[11-13]设计公式为
(3)
式中N—小型拖拉机额定功率(kW);
T—作业幅度(m)。
小型拖拉机的额定功率取N= 6.7kW,根据式(3)可得:T= 0.67 ~0.88m。参考烤烟农作物垄面载植时的技术要求,该机器的设计幅宽取T=0.8m,符合农艺要求。
1.3.2功率消耗计算
影响功率消耗的因素很多,主要有刀辊转速、机组前进速度、耕深、土质、土壤含水率和土壤坚实度等。为了计算功耗,国内外学者提出了诸如单元法、能量法、比功法、比阻法等解析方法。由于影响旋耕功耗的因素较多所以解析法难以应用,可用经验公式简单计算,即
N=0.1KλdvmB
(4)
式中d—耕深(cm);
vm—机组前进速度(m/s);
B—耕幅(m);
Kλ—旋耕比阻(N/cm2),Kλ=KgK1K2K3K4。
根据农业机械设计手册,Kg、K1、K2、K3、K4分别取值11、0.8、0.82、0.7、0.66,可求得Kλ=3.33,进而可求得N=0.1KλdvmB=4.8。
1.4工作原理
小型柴油机的动力输出经减速器、链传动将动力传递至刀轴,并驱动其转动;起垄刀旋转对土壤进行切削、碎土并将土壤向中间推送,在起垄成型装置的作用下形成单行垄型;在起垄的同时若为间断施肥,在地轮的驱动作用下,施肥与施肥点标记两个动作同时进行,肥料施在土壤15~20cm的深度内,石灰标记点标记在肥料的正上方的垄顶出,为后续的打孔工序做准备;若为连续条施肥方式,在肥料直接施在土壤中,标记装置不再起作用,最终实现了起垄施肥及标记的功能。
2 主要工作部件设计
2.1起垄刀轴
起垄刀轴是自走式起垄定点施肥机的主要工作部件,起垄刀的排列方式是否合理对起垄效果是否符合农艺要求及起垄机的功率消耗量大小等有很大影响。根据相关文献,本文设计刀座与刀轴轴线成25°夹角焊接,且刀座在刀轴上的排列为双螺旋线形式[14-18]。刀片之间的角度分别为90°,刀片左右对称安装。图4即为自走式起垄定点施肥机的刀轴示意图。

图4 烟用起垄定点施肥机刀轴示意图
2.2定点施肥机构设计
在杠杆的另一端,通过拉伸线与喇叭口里面的锥体连接,当地轮与凸轮转动时,凸轮上的高点和低点与滚子交替接触,使得杠杆有规律地摆动,即每旋转1周杠杆摆动两次,每次杠杆的高点与滚子接触拉线拉动锥体关闭,每次杠杆的低点与滚子接触拉线拉动锥体打开;锥体间断、有规律地开合,完成了肥料的间断施肥;起垄施肥机间断施肥的后,肥料以椭圆状均匀铺撒于土壤中,避免了肥料集中释放的弊端。这种形状符合农艺的要求,不会产生烧苗的情况。
凸轮的形状是对称的,形状如图5中部件7所示。当凸轮转到最高点时,锥体通过杠杆拉动呈关闭状态,肥料开始积累;当凸轮转到最低点是,锥体打开,肥料落下。锥体形状如图5中部件11所示。

1.肥料箱 2.外槽轮式排肥器 3.链条 4. 5.摆动从动件 6.滚子 7.凸轮 8.地轮 9.叶片 10.喇叭口 11.锥体开关 12.拉线 13.导肥管图5 定点施肥装置及施肥点标记装置结构
该设计可以完成两种形式的施肥过程:一种是上述所说的间断施肥方式;另一种便是常规的条施方式,即当取消杠杆与凸轮的配合时,锥体一直保持打开的状态,肥料下落,完成条施肥。同时,杠杆与凸轮不配合,轮子上的标记孔不进行标记。
2.3肥料释放点标记装置设计
肥料释放点标记装置靠自身重力压在已经起垄型的顶部,整机前进时,在与土壤的摩擦力的作用下开始转动,并驱动外槽轮式排肥器转动。当起垄施肥机以间断施肥方式作业时,标记轮便起到了作用,锥体开关在凸轮控制下,同时进行施肥与标记。施肥点与标记点的配合过程是:当凸轮转到低点时,锥体打开,肥料下落;石灰粉通过标记孔落下,完成施肥点的标记;凸轮有两个低点,对应的轮子上设有两个标记孔,轮子每旋转一周完成两次标记过程;施肥喇叭口的位置位于标记装置的前面,在此过程中标记点标记的位置总是前一次的施肥点,按此顺序,施肥与标记过程连续进行。
2.4标记点与施肥点的误差分析
肥料释放点与标记点的配合受整机震动、前进速度、垄型高低变化、土壤形状等因素的影响会产生配合误差。对定点施肥装置及施肥点标记装置结构进行简化,简化后的简图如图6所示。
图6中:L为起垄高度;r0为地轮半径;h0为叶片长度;a为支撑架长度;o为旋转中心;α为旋转角度;g为施肥深度;s为施肥点间距(株距)。

图6 定点施肥机构简化图
在定点施肥机的起垄高度L和施肥深度g确定的条件下,株距的距离随叶片的长度变化而变化,其关系式为
s=asinα
(5)
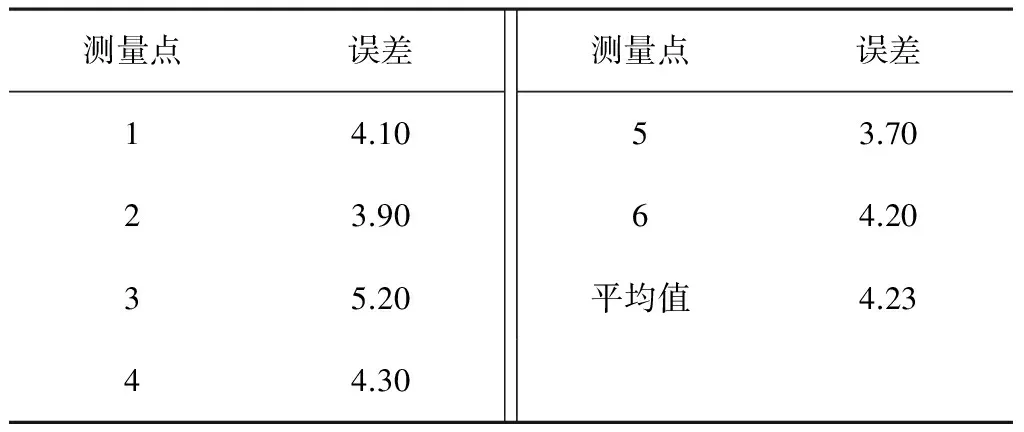
α=arccos[(H-g-r0-h0)/α](4cm (6) 在地轮旋转1周的过程中,在凸轮的控制下标记系统有两次标记的过程,所以标记点之间的距离s1为地轮与叶片总周长的1/2,则 s1=2π(r0+h0)/2 (7) 由式(1)~式(3)可以求出施肥点与标记点之间的误差,即 Δs=|s-s1| (8) 通过MatLab对式(5)~式(8)进行编程可以得到误差Δs与h0的变化关系,如图7所示。 图7 误差Δs与h0的变化关系 由图7可知:当4cm 2.5限深轮装置 限深轮组件安装在后起垄板上,保证其工作在起垄成型后沟底的地面,使起垄机平稳运行,减轻作业者的负荷。限深轮的工作原理是:手柄与螺柱连接,螺柱与小轮叉螺纹连接,限深轮套筒联接在后起垄板及后梁连接架上,当转动手柄时轮叉可实现上下移动;轮叉与轮子通过连接块相连接,从而使轮子能够随时升降,满足实际的深耕要求。限深轮组件结构简图如图8所示。 1.手柄 2.上抚平板 3.后起垄板 4.左右起垄板 5.轮子 6.升降杆图8 限深轮装置 3.1试验条件与方法 试验地点为贵州省遵义市播州区乐山科技园,如图9所示。 图9 贵州省贵州省遵义市播州区乐山科技园 在外槽轮式排肥器的转轮开口长度设为40mm、整机前进速度为1.5m/s的条件下,进行连续条施肥方式与定点施肥方式的对比试验。根据烤烟农艺要求,间断定点施肥时,每株烤烟附近需施45g颗粒状复合肥,并且烤烟根系能吸收利用到的肥料的有效范围可近似为20cm×20cm的方形区域。为了能进行连续条施肥与间断施肥两种施肥方式的对比试验,可将条施肥方式等效为连续的间断施肥方式,即在30m的施肥距离内,烤烟株距为50cm的条件下,若间断施肥方式可施60个点,则连续条施肥方式可认为施了150点。在此条件下进行试验,共进行10次,每次施肥距离为30m,包括5次连续条施肥和5次间断施肥。 每次间断施肥试验所使用的肥料,均用收纳袋收纳并进行称重,再取平均值。间断施肥试验之后随机选取6个点,对施肥点和标记点的相对位置进行测量并记录。 每次连续条施肥试验,随机取5个点,每个点的区域范围为20cm×20cm,并取出该范围内的肥料进行称重,再取平均值。 垄型的测定则在10次起垄施肥之后分别对垄高、垄底宽、垄间距进行测量。 3.2结果与分析 3.2.1连续条施肥方式与间断施肥方式的对比试验 通过试验测得连续条施与间断施肥两种施肥方式在20×20cm方形区域范围内(烤烟根系可以吸收利用的范围)的施肥量,结果如表1所示。 表1连续条施肥方式与定点施肥方式试验结果对比 Table 1Test contrast between continuous fertilizing and point fertilizingg 施肥质量条施肥间断施肥119.248.2221.953.4323.249.3420.354.2518.554.2平均值20.651.1 连续条施肥时,在20cm×20cm方形区域范围内肥料的平均值为20.6g;间断施肥时,在施肥长度为30m、株距为50cm的条件下,共有60个施肥点,平均每个施肥点的施肥量为51.1g。从施肥结果看出:在施肥条件相同的条件下,连续条施肥方式的施肥量达不到50g,不能满足农艺要求;间断施肥方式时每点的施肥量为51.1g,可以满足农艺要求。 烤烟根系周围20cm×20cm方形区域是施肥的有效区域,离根系较远的肥料区域,根系无法吸收利用,则认为是无效区域。在此条件下,当连续条施肥时,在30m的施肥长度下,可以分为150个施肥区域,其中有效的施肥区域(有效施肥点)个数为60,无效施肥区域(无效施肥点)为90个,则肥料浪费率为 3.2.2垄型参数结果 通过测量10个测量点并计算平均值,求得垄高为301.5mm、垄底宽为804.5mm、垄间距为1104.6mm,各尺寸均满足农艺要求。根据需要可调节垄高、垄底宽、垄间距,以满足不同农艺要求。 3.2.3标记点与施肥点的试验误差结果 试验验证,间断施肥的肥料撒落形状近似于椭圆形,以椭圆形的中心为参考点与标记点进行误差测量,通过测量6个施肥点与标记点的误差距离结果如表2所示。 表2标记点与施肥点的误差结果 Table 2Error between marker point and point of fertilizer cm 测量点误差测量点误差14.1023.9035.2044.3053.7064.20平均值4.23 通过表2可以看出:标记点与施肥点的试验误差平均值在4.23cm,满足设计要求且满足烤烟种植的农艺要求。 1)理论分析与试验表明:研制的自走式起垄定点施肥机能实现一垄一行的烤烟起垄及定点施肥的作业要求,各项作业指标满足农艺要求。 2)起垄刀轴的螺旋线设计能实现土壤快速向中间聚集,能够保证起垄的效率。 3)所设计凸轮机构能实现肥料的间断施肥,标记点与施肥点的试验误差平均值4.23cm,满足设计要求且满足烤烟种植的农艺要求,为后续的打孔提供了方便,对前期烟苗的生长有较好的作用。 4)烟田田间对比试验表明:连续条施肥方式的肥料浪费率为60%,间断定点施肥方式则能满足农艺要求,节约了肥料,减少了污染。 参考文献: [1]张小丽, 张晋国,李江国. 双层施肥旋耕播种机的设计[J].农业机械学报,2006,37(11):49-51. [2]邓春岩,陈芳,张丽坤,等.小型施肥器的设计[J].农机化研究,2011,33(6):87-89. [3]李宁,胡丰收,郭栋,等.烟叶挖穴施肥机的研制[J].河南农业大学学报,2011(4):445-447. [4]辛莉,陶静,张敬,等.2BJ-2型精密播种穴施肥机的研制[J].农业机械,2009(7):102-104. [5]周舟,王秀,马伟,等.移动式温室精准施肥机的研制[J].农机化研究,2009, 31(12):86-89. [6]高丽红.旋耕刀的设计及排列浅析[J].机械管理开发,2007(2):16-18. [7]谭宏杰.1GZL-140(2)耕整联合作业机的研究[D].长春:吉林大学,2009. [8]刘小伟.双棍秸秆还田旋耕机的研制开发[D].北京:中国农业大学,2000. [9]申屠留芳,邵鹏.正反转旋耕灭茬机刀片的功耗分析[J].农机化研究,2007(11):87-88. [10]中国农业机械化科学院.农业机械设计手册(上册)[K].北京:机械工业出版社,2007. [11]辛莉,陶静,张敬,等.2BJ-2型精密播种穴施肥机的研制[J].农业机械,2009(7):102-103. [12]袁文胜,金梅,吴崇友,等.国内种肥施肥机械化发展现状及思考[J].农机化研究,2011,33(12):1-4. [13]袁美莲,祝金虹,郑立华.不同施肥处理对烤烟产量与品质效果影响试验[J].现代农业科技,2009(8):117-119. [14]刘阳春,张小超,伟利国,等.一种变量施肥技术的实现及其台架试验[J].农业机械学报, 2010, 41(9):159-161. [15]陈雄飞,罗锡文,王在满,等.水稻穴播同步侧位深施肥技术试验研究[J].农业工程学报,2014,30(16) :1-6. [16]倪金应,严祖贵,阴长林.起垄机在南方丘陵地区烤烟耕作中的应用及改进[J].中国烟草科学,2001(2):47. [17]罗俊勇,刘峰,杨卫平,等.双螺旋变螺距旋耕起垄机的设计[J].南方农机,2013(6):27-28. [18]李革,艾力·哈斯木,康秀生,等.地膜播种机螺旋覆土滚筒的参数优化[J].农业工程学报, 2003,19(6):135-138. ID:1003-188X(2018)04-0104-EA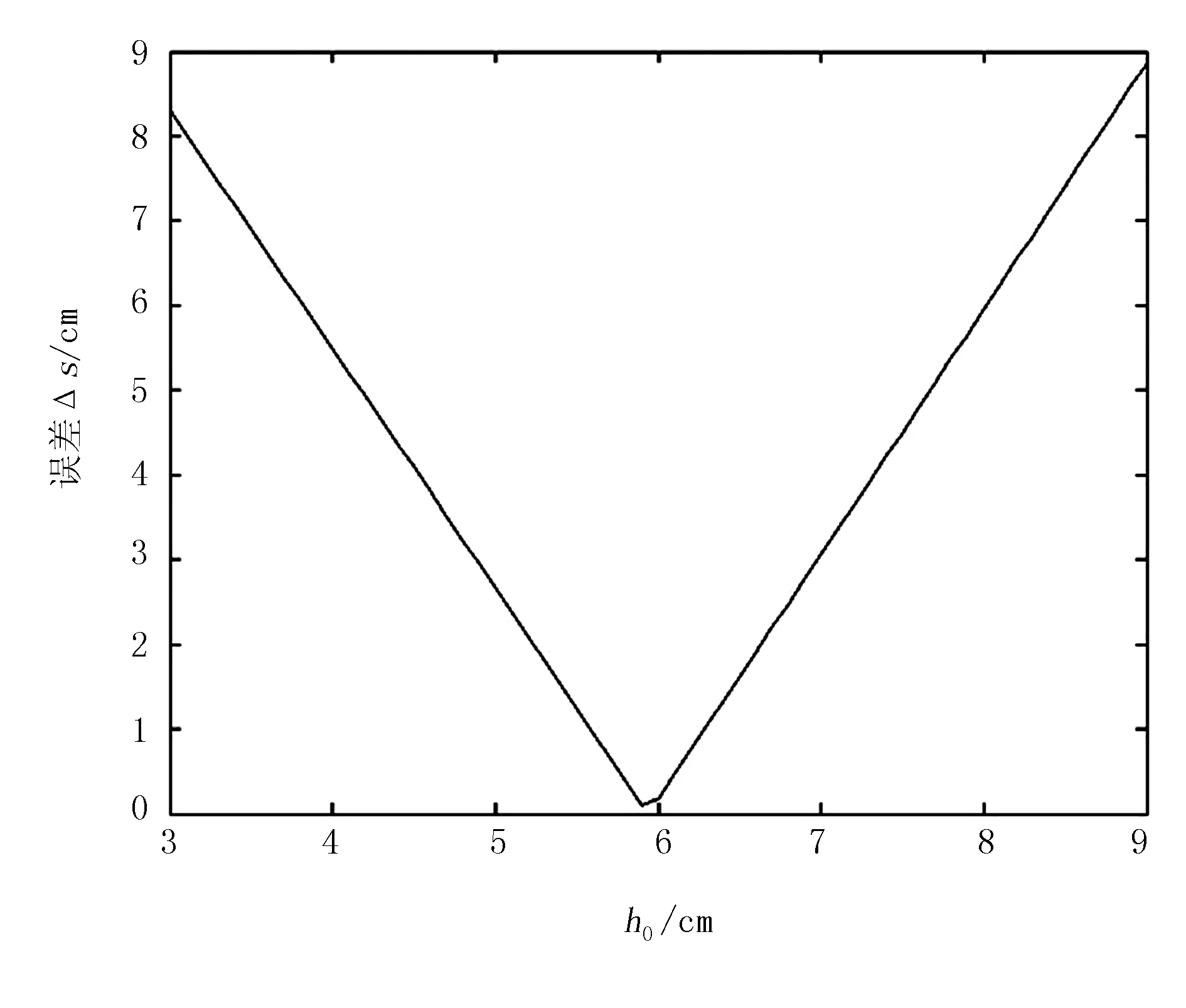

3 田间试验



4 结论
猜你喜欢
科学技术创新(2022年24期)2022-08-06农业工程学报(2022年1期)2022-03-25石油化工腐蚀与防护(2021年5期)2021-11-01装备维修技术(2021年42期)2021-03-15农业开发与装备(2021年1期)2021-02-08小猕猴智力画刊(2020年5期)2020-06-01制造技术与机床(2019年8期)2019-09-03物理实验(2019年4期)2019-05-07制造技术与机床(2017年5期)2018-01-19北京航空航天大学学报(2017年7期)2017-11-24
